五轴伺服横走式机械手过载保护系统的制作方法
1.本实用新型属于过载保护技术领域,涉及五轴伺服横走式机械手过载保护系统。
背景技术:
2.随着工厂推行工业4.0无人化加工产品, 五轴伺服横走式取出机械手由机器精确操控,因此完全可以按照工厂计划来控制产品产量,排除掉人工不确定性和失误操作等因数
3.在正常生产时由五轴伺服横走式机械手来取出制品,注塑机周期固定,成品稳定性极佳,使质量有保证。
4.设备厂家考虑了精确定位,运行的稳定性,可忽略了机械手臂点到点直线重复运动,因外部因素导致机械臂放置产品错位高出,或者在码垛装箱时产品放置错位翘起,机械臂下行的净空间减少,机械手手臂无法运行到程序终点,机械臂伺服电机输出导致机械臂电机过载,治具损坏,产品压伤,造成设备停机。
技术实现要素:
5.本实用新型的目的在于提供五轴伺服横走式机械手过载保护系统,以解决上述背景技术中提出的问题。
6.本实用新型的目的可通过下列技术方案来实现:五轴伺服横走式机械手过载保护系统,包括电箱外壳、报警灯和压力负载检测机构,所述电箱外壳的内部分别安装有复位开关、电源变压器、中间继电器、电源开关和压力检测仪,所述电箱外壳的底端固定设有机械手接线端子,所述机械手接线端子与机械手外围安全联锁电性连接,所述机械手接线端子通过复位开关与压力检测仪电性连接,所述电源开关、压力检测仪和报警灯均通过中间继电器与电源变压器电性连接;
7.所述压力负载检测机构由下模固定板、压力传感器、轻型弹簧和上模固定板组成,所述下模固定板顶端的中心处固定安装有压力传感器,所述压力传感器与压力检测仪电性连接,所述下模固定板顶端的四个边角处均固定安装有轻型弹簧,四个所述轻型弹簧的顶端固定安装有上模固定板,所述上模固定板的底端与压力传感器的顶端接触连接。这样设置的目的是通过压力传感气便于检测上模固定板的压力超过设定值上限时,压力检测仪发出信号控制机械手的外围安全联锁装置,机械手主臂停止下行动作,并发出警报并注塑成型机停止运行,有效的避免了因过载导致产品损坏,治具受力配件错位,机械手轴电机过载卡死无法运行。
8.在上述的五轴伺服横走式机械手过载保护系统中,
9.四根所述轻型弹簧的中部均套设连接有导柱,四根所述导柱的对面尺寸为10mm。这样设置的目的是支撑固定治具使用。
10.在上述的五轴伺服横走式机械手过载保护系统中,所述电箱外壳为钣金一体成型。这样设置的目的是以增加耐火焰与抗冲击性。
11.在上述的五轴伺服横走式机械手过载保护系统中,所述电源开关可为2p漏电保护器。
12.在上述的五轴伺服横走式机械手过载保护系统中,所述中间继电器为施耐德插拔式小型2副触点5a8脚两开两闭220v。这样设置的目的是当检测装置压力异常通过导线及信号控制机械手及成型机停止运行。
13.在上述的五轴伺服横走式机械手过载保护系统中,所述压力传感器可为lz-808承映传感器。这样设置的目的是两组继电器输出分别控制机械手停止运行,成型机停止运行,并发出警报。
14.与现有技术相比,本实用新型五轴伺服横走式机械手过载保护系统的优点为:通过压力传感气便于检测上模固定板的压力超过设定值上限时,压力检测仪发出信号控制机械手的外围安全联锁装置,机械手主臂停止下行动作,并发出警报并注塑成型机停止运行,有效的避免了因过载导致产品损坏,治具受力配件错位,机械手轴电机过载卡死无法运行。
附图说明
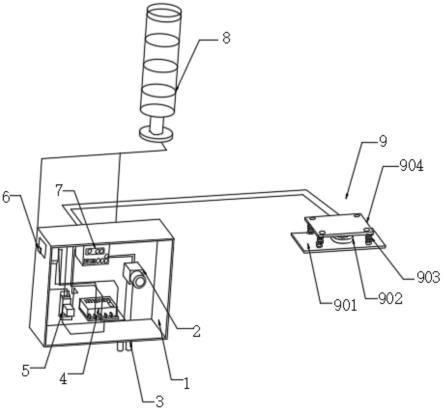
15.图1是本实用新型五轴伺服横走式机械手过载保护系统的结构示意图。
16.图中,1、电箱外壳;2、复位开关;3、机械手接线端子;4、电源变压器;5、中间继电器;6、电源开关;7、压力检测仪;8、报警灯;9、压力负载检测机构;901、下模固定板;902、压力传感器;903、轻型弹簧;904、上模固定板。
具体实施方式
17.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
18.如图1所示,本实用新型五轴伺服横走式机械手过载保护系统,包括电箱外壳1、报警灯8和压力负载检测机构9,电箱外壳1的内部分别安装有复位开关2、电源变压器4、中间继电器5、电源开关6和压力检测仪7,电箱外壳1的底端固定设有机械手接线端子3,机械手接线端子3与机械手外围安全联锁电性连接,机械手接线端子3通过复位开关2与压力检测仪7电性连接,电源开关6、压力检测仪7和报警灯8均通过中间继电器5与电源变压器4电性连接;
19.压力负载检测机构9由下模固定板901、压力传感器902、轻型弹簧903和上模固定板904组成,下模固定板901顶端的中心处固定安装有压力传感器902,压力传感器902与压力检测仪7电性连接,下模固定板901顶端的四个边角处均固定安装有轻型弹簧903,四个轻型弹簧903的顶端固定安装有上模固定板904,上模固定板904的底端与压力传感器902的顶端接触连接。
20.如图1所示,本实用新型五轴伺服横走式机械手过载保护系统,四根轻型弹簧903的中部均套设连接有导柱,四根导柱的对面尺寸为10mm,电箱外壳1为钣金一体成型,电源开关6可为2p漏电保护器,中间继电器5为施耐德插拔式小型2副触点5a8脚两开两闭220v,压力传感器902可为lz-808承映传感器。
21.具体实施,在使用该五轴伺服横走式机械手过载保护系统时,通过安装的压力传感器902实时的检测上模固定板904的压力,当压力超过设定值时,压力传感器902将检测的
数据发送至压力检测仪7,通过压力检测仪7发送信号至机械手的外围安全联锁装置,通过外围安全联锁装置,将机械手臂停止,并通过连接的报警灯8进行闪烁警示,通知现场技术人员处理故障,有效的避免了当产品放置异常高出基准高度,及输送设备故障上一下模次的产品未流出放置为,机械手二次放置产品时还根据程序预定的终点运行就会压到上一模次未出的产品,导致产品损坏,治具受力配件错位,机械手轴电机过载卡死无法运行的问题。
22.本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
技术特征:
1.五轴伺服横走式机械手过载保护系统,包括电箱外壳(1)、报警灯(8)和压力负载检测机构(9),其特征在于,所述电箱外壳(1)的内部分别安装有复位开关(2)、电源变压器(4)、中间继电器(5)、电源开关(6)和压力检测仪(7),所述电箱外壳(1)的底端固定设有机械手接线端子(3),所述机械手接线端子(3)与机械手外围安全联锁电性连接,所述机械手接线端子(3)通过复位开关(2)与压力检测仪(7)电性连接,所述电源开关(6)、压力检测仪(7)和报警灯(8)均通过中间继电器(5)与电源变压器(4)电性连接;所述压力负载检测机构(9)由下模固定板(901)、压力传感器(902)、轻型弹簧(903)和上模固定板(904)组成,所述下模固定板(901)顶端的中心处固定安装有压力传感器(902),所述压力传感器(902)与压力检测仪(7)电性连接,所述下模固定板(901)顶端的四个边角处均固定安装有轻型弹簧(903),四个所述轻型弹簧(903)的顶端固定安装有上模固定板(904),所述上模固定板(904)的底端与压力传感器(902)的顶端接触连接。2.根据权利要求1所述的五轴伺服横走式机械手过载保护系统,其特征在于,四根所述轻型弹簧(903)的中部均套设连接有导柱,四根所述导柱的对面尺寸为10mm。3.根据权利要求1所述的五轴伺服横走式机械手过载保护系统,其特征在于,所述电箱外壳(1)为钣金一体成型。4.根据权利要求1所述的五轴伺服横走式机械手过载保护系统,其特征在于,所述电源开关(6)可为2p漏电保护器。5.根据权利要求1所述的五轴伺服横走式机械手过载保护系统,其特征在于,所述压力传感器(902)可为lz-808承映传感器。
技术总结
本实用新型提供了五轴伺服横走式机械手过载保护系统,包括电箱外壳、报警灯和压力负载检测机构,所述电箱外壳的内部分别安装有复位开关、电源变压器、中间继电器、电源开关和压力检测仪,所述电箱外壳的底端固定设有机械手接线端子,所述机械手接线端子与机械手外围安全联锁电性连接,所述机械手接线端子通过复位开关与压力检测仪电性连接。本实用新型通过压力传感气便于检测上模固定板的压力超过设定值上限时,压力检测仪发出信号控制机械手的外围安全联锁装置,机械手主臂停止下行动作,并发出警报并注塑成型机停止运行,有效的避免了因过载导致产品损坏,治具受力配件错位,机械手轴电机过载卡死无法运行。手轴电机过载卡死无法运行。手轴电机过载卡死无法运行。
技术研发人员:陈柏念 卢道杰 张维凯
受保护的技术使用者:太普动力新能源(常熟)股份有限公司
技术研发日:2022.06.28
技术公布日:2023/3/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1