一种空调器和控制方法与流程
[0001]
本申请涉及空调控制领域,更具体地,涉及一种空调器和控制方法。
背景技术:
[0002]
在智能空调行业中,如何实现空调的智慧送风是智能空调的关键技术,而智慧送风的关键在于选择合适的传感器实现房间内目标的准确监测。
[0003]
目前用于房间内的人员监测的传感器主要有光学传感器,如摄像头。其中,摄像头主要利用目标对光信号的反射进行成像,成像精度高,但是会对用户的隐私造成一定程度的侵犯。
[0004]
因此,如何提供一种在保证用户隐私的基础上实现准确送风的空调器,是目前有待解决的技术问题。
技术实现要素:
[0005]
本发明提供一种空调器,用以解决现有技术中无法在保证用户隐私的基础上实现空调准确送风的技术问题。
[0006]
该空调器包括:
[0007]
冷媒循环回路,使冷媒在压缩机、冷凝器、膨胀阀、蒸发器和四通阀组成回路中进行循环;
[0008]
压缩机,用于进行将低温低压冷媒气体压缩成高温高压冷媒气体并排至冷凝器的工作;
[0009]
室外热交换器和室内热交换器,其中,一个为冷凝器进行工作,另一个为蒸发器进行工作;
[0010]
室内风扇,用于将气流经吸入口引入并经室内热交换器后由吹出口送出;
[0011]
导风板,用于调整所述室内风扇的出风方向;
[0012]
控制器;
[0013]
所述空调器还包括:雷达传感器,用于:
[0014]
当接收到所述控制器发送的区域监控指令时,基于排序统计恒虚警率os-cfar算法对回波信号进行处理并确定目标检测结果;
[0015]
根据所述目标检测结果确定室内空间的目标数量和目标位置;
[0016]
将所述目标数量和所述目标位置发送到所述控制器,以使所述控制器根据所述目标数量控制所述室内风扇的转速,并根据所述目标位置确定所述导风板的角度。
[0017]
在本申请一些实施例中,所述雷达传感器具体用于:
[0018]
基于对所述回波信号的一维距离像中的参考单元进行排序确定有序样本序列,并确定所述有序样本序列中的最小单元;
[0019]
根据所述参考单元的概率密度函数和所述参考单元的累积分布函数确定所述最小单元的概率密度函数;
[0020]
根据所述最小单元的概率密度函数和预设概率值确定所述目标检测结果;
[0021]
其中,所述参考单元为待检测单元周围的预设数量的样本,所述参考单元和所述待检测单元的背景统计特性相同,所述预设概率值为预设检测概率或预设虚警概率。
[0022]
在本申请一些实施例中,所述雷达传感器还具体用于:
[0023]
根据所述最小单元的概率密度函数确定所述待检测单元的杂波功率估计值的概率密度函数;
[0024]
根据所述杂波功率估计值的概率密度函数确定所述杂波功率估计值;
[0025]
根据所述预设概率值确定所述最小单元的门限因子;
[0026]
根据所述杂波功率估计值和所述门限因子确定所述目标检测结果。
[0027]
在本申请一些实施例中,所述雷达传感器包括三发四收天线阵列,所述雷达传感器具体用于:
[0028]
根据所述目标检测结果确定所述室内空间是否存在目标,并在存在所述目标时确定所述目标到所述雷达传感器的距离;
[0029]
根据所述目标到两个接收天线的相位差确定所述目标的角度;
[0030]
根据所述角度和所述距离确定所述目标的坐标信息;
[0031]
基于聚类算法dbscan对所述坐标信息进行处理并确定所述目标数量和所述目标位置;
[0032]
其中,所述角度包括x轴方向的方位角度和俯仰角度,以及y轴方向的方位角度和俯仰角度。
[0033]
在本申请一些实施例中,所述雷达传感器还具体用于:
[0034]
获取与所述坐标信息对应的连续多帧的定位结果,从各所述定位结果中任取一个定位结果作为核心对象,并根据所述核心对象能够密度可达的样本集合确定一个聚类结果;
[0035]
从各所述定位结果中任取一个未被聚类的定位结果作为新的核心对象,并根据所述新的核心对象能够密度可达的样本集合确定一个新的聚类结果,并根据下一个新的核心对象确定下一个新的聚类结果,直至各所述定位结果中不存在未被聚类的定位结果;
[0036]
根据样本数量大于预设数量的聚类结果中样本的平均值确定所述目标数量和所述目标位置。
[0037]
在本申请一些实施例中,所述雷达传感器还用于:
[0038]
基于对原始回波信号进行脉冲压缩确定所述原始回波信号的频域信号;
[0039]
根据动目标显示mti算法对所述频域信号进行处理并确定目标距离像;
[0040]
基于对所述目标距离像进行非相干积累的结果确定所述回波信号的一维距离像。
[0041]
在本申请一些实施例中,所述回波信号的一维距离像为经过平方律检波器后的一维距离像,各所述参考单元为统计独立同分布。
[0042]
相应的,本发明还提出了一种空调器的控制方法,所述方法应用于包括冷媒循环回路、压缩机、室外热交换器、室内热交换器、室内风扇、导风板和控制器的空调器中,所述空调器还包括雷达传感器,所述方法包括:
[0043]
当接收到所述控制器发送的区域监控指令时,所述雷达传感器基于排序统计恒虚警率os-cfar算法对回波信号进行处理并确定目标检测结果;
[0044]
所述雷达传感器根据所述目标检测结果确定室内空间的目标数量和目标位置;
[0045]
所述雷达传感器将所述目标数量和所述目标位置发送到所述控制器,以使所述控制器根据所述目标数量控制所述室内风扇的转速,并根据所述目标位置确定所述导风板的角度。
[0046]
在本申请一些实施例中,所述雷达传感器基于排序统计恒虚警率os-cfar算法对回波信号进行处理并确定目标检测结果,具体为:
[0047]
所述雷达传感器基于对所述回波信号的一维距离像中的参考单元进行排序确定有序样本序列,并确定所述有序样本序列中的最小单元;
[0048]
所述雷达传感器根据所述参考单元的概率密度函数和所述参考单元的累积分布函数确定所述最小单元的概率密度函数;
[0049]
所述雷达传感器根据所述最小单元的概率密度函数和预设概率值确定所述目标检测结果;
[0050]
其中,所述参考单元为待检测单元周围的预设数量的样本,所述参考单元和所述待检测单元的背景统计特性相同,所述预设概率值为预设检测概率或预设虚警概率。
[0051]
相应的,本发明还提出了一种空调器的控制方法,所述方法应用于包括冷媒循环回路、压缩机、室外热交换器、室内热交换器、室内风扇、导风板和控制器的空调器中,所述空调器还包括雷达传感器,所述方法包括:
[0052]
所述控制器基于预设时间间隔定期向所述雷达传感器发送区域监控指令,并接收所述雷达传感器返回的室内空间的目标数量和目标位置;
[0053]
若所述目标数量不为零,所述控制器根据所述目标数量控制所述室内风扇的转速,并根据所述目标位置控制所述导风板的角度;
[0054]
若所述目标数量为零且保持预设时长,所述控制器控制所述空调器进入预设待机状态或关机;
[0055]
若所述目标数量不为零且所述空调器在关机状态,所述控制器控制所述空调器开启并使所述空调器进入预设运行模式;
[0056]
其中,所述目标数量和所述目标位置是所述雷达传感器基于排序统计恒虚警率os-cfar算法对回波信号进行处理后确定的。
[0057]
与现有技术相比,在包括冷媒循环回路、压缩机、室外热交换器、室内热交换器、室内风扇、导风板、控制器和雷达传感器的空调器中,雷达传感器用于当接收到所述控制器发送的区域监控指令时,基于排序统计恒虚警率os-cfar算法对回波信号进行处理并确定目标检测结果;根据所述目标检测结果确定室内空间的目标数量和目标位置;将所述目标数量和所述目标位置发送到所述控制器,以使所述控制器根据所述目标数量控制所述室内风扇的转速,并根据所述目标位置确定所述导风板的角度,从而在保证用户隐私的基础上实现了准确送风,提高了用户体验。
附图说明
[0058]
为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附
图。
[0059]
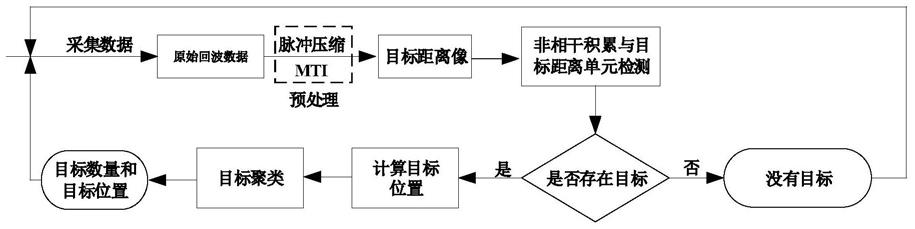
图1示出了本发明实施例中的雷达传感器的信号处理流程示意图;
[0060]
图2示出了本发明实施例中os_cfar恒虚警检测框图;
[0061]
图3示出了本发明实施例中雷达传感器的天线阵列示意图;
[0062]
图4示出了本发明实施例中比相测角原理示意图;
[0063]
图5示出了本发明实施例中dbscan聚类算法原理示意图;
[0064]
图6示出了本发明实施例中一种空调器的控制方法的流程示意图;
[0065]
图7示出了本发明另一实施例中一种空调器的控制方法的流程示意图。
具体实施方式
[0066]
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
[0067]
在本申请的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
[0068]
术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本申请的描述中,除非另有说明,“多个”的含义是两个或两个以上。
[0069]
在本申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本申请中的具体含义。
[0070]
本申请中空调器通过使用压缩机、冷凝器、膨胀阀和蒸发器来执行空调器的制冷循环。制冷循环包括一系列过程,涉及压缩、冷凝、膨胀和蒸发,并向已被调节和热交换的空气供应制冷剂。
[0071]
压缩机压缩处于高温高压状态的制冷剂气体并排出压缩后的制冷剂气体。所排出的制冷剂气体流入冷凝器。冷凝器将压缩后的制冷剂冷凝成液相,并且热量通过冷凝过程释放到周围环境。
[0072]
膨胀阀使在冷凝器中冷凝的高温高压状态的液相制冷剂膨胀为低压的液相制冷剂。蒸发器蒸发在膨胀阀中膨胀的制冷剂,并使处于低温低压状态的制冷剂气体返回到压缩机。蒸发器可以通过利用制冷剂的蒸发的潜热与待冷却的材料进行热交换来实现制冷效果。在整个循环中,空调器可以调节室内空间的温度。
[0073]
空调器的室外单元是指制冷循环的包括压缩机和室外热交换器的部分,空调器的室内单元包括室内热交换器,并且膨胀阀可以提供在室内单元或室外单元中。
[0074]
室内热交换器和室外热交换器用作冷凝器或蒸发器。当室内热交换器用作冷凝器时,空调器用作制热模式的加热器,当室内热交换器用作蒸发器时,空调器用作制冷模式的冷却器。
[0075]
室内风扇产生通过室内热交换器的室内空气的气流,以促进在传热管中流动的制冷剂与室内空气的热交换。该室内风扇由能够变更转速的室内风扇马达驱动。导风板用于调整室内风扇的出风角度。
[0076]
本实施例中的空调器还包括雷达传感器,用于:
[0077]
当接收到所述控制器发送的区域监控指令时,基于排序统计恒虚警率os-cfar算法对回波信号进行处理并确定目标检测结果;
[0078]
根据所述目标检测结果确定室内空间的目标数量和目标位置;
[0079]
将所述目标数量和所述目标位置发送到所述控制器,以使所述控制器根据所述目标数量控制所述室内风扇的转速,并根据所述目标位置确定所述导风板的角度。
[0080]
恒虚警(cfar)技术是在检测目标的过程中保持恒定的虚警概率,不受背景杂波的影响。在实际雷达检测中,为了获得稳定检测性能和恒定的虚警概率,常常从实时测量得到的回波数据中估计背景杂波功率电平,从而自适应地调整检测门限。cfar处理的关键就是对背景杂波功率进行估计。os-cfar的主要目的是抑制遮蔽效应引起的性能恶化,对参考单元值进行排序,排序后序列的第k个元素称为第k个有序统计量,该统计量的值作为杂波功率估计值。
[0081]
本实施例中,雷达传感器可以为毫米波雷达传感器,当接收到控制器发送的区域监控指令时,雷达传感器发射电磁波对室内空间的目标进行照射并接收其回波信号,该目标可以为室内人员,基于os(ordered statistics,排序统计)-cfar(constant false alarm rate,恒虚警率)算法对回波信号进行处理并确定目标检测结果,并根据目标检测结果确定室内空间的目标数量和目标位置,然后将目标数量和目标位置发送到所述控制器,使控制器根据目标数量控制室内风扇的转速,并根据目标位置确定导风板的角度。
[0082]
为了确定准确的目标检测结果,在本申请一些实施例中,所述雷达传感器具体用于:
[0083]
基于对所述回波信号的一维距离像中的参考单元进行排序确定有序样本序列,并确定所述有序样本序列中的最小单元;
[0084]
根据所述参考单元的概率密度函数和所述参考单元的累积分布函数确定所述最小单元的概率密度函数;
[0085]
根据所述最小单元的概率密度函数和预设概率值确定所述目标检测结果;
[0086]
其中,所述参考单元为待检测单元周围的预设数量的样本,所述参考单元和所述待检测单元的背景统计特性相同,所述预设概率值为预设检测概率或预设虚警概率。
[0087]
具体的,一维距离像是用宽带雷达信号获取的目标散射点子回波在雷达射线上投影的向量和。本实施例中,如图2所示,对一维距离像中的参考单元进行排序,可根据功率大小从大到小进行排序,也可从小到大进行排序,根据排序的结果确定有序样本序列,并确定有序样本序列中的最小单元。参考单元为待检测单元cut周围的预设数量(如r个)的样本,本领域技术人员可灵活设定不同数量的参考单元。所述参考单元和所述待检测单元的背景统计特性相同,可选的,为了防止待检测单元附近的参考单元接收待检测单元的信号能量,
保证对杂波功率谱的准确估计,将待检测单元cut附近的指定数量的距离单元作为保护单元。
[0088]
本实施例中,雷达传感器接收的噪声和背景杂波服从高斯分布,其包络为瑞利分布,各参考单元对应的采样服从指数分布,根据参考单元的概率密度函数和累积分布函数可确定最小单元的概率密度函数,可选的,还可根据参考单元的概率密度函数和累积分布函数确定最小单元的累积分布函数。根据最小单元的累积分布函数与预设检测概率或预设虚警概率可确定目标检测结果,通过该目标检测结果可确定是否存在目标。
[0089]
需要说明的是,以上实施例的方案仅为本申请所提出的一种具体实现方案,其他基于os-cfar算法对回波信号进行处理并确定目标检测结果的配置方式均属于本申请的保护范围。
[0090]
为了确定准确的目标检测结果,在本申请一些实施例中,所述雷达传感器还具体用于:
[0091]
根据所述最小单元的概率密度函数确定所述待检测单元的杂波功率估计值的概率密度函数;
[0092]
根据所述杂波功率估计值的概率密度函数确定所述杂波功率估计值;
[0093]
根据所述预设概率值确定所述最小单元的门限因子;
[0094]
根据所述杂波功率估计值和所述门限因子确定所述目标检测结果。
[0095]
本实施例中,根据所述最小单元的概率密度函数可确定待检测单元的杂波功率估计值的概率密度函数;根据杂波功率估计值的概率密度函数可确定杂波功率估计值,预设检测概率或预设虚警概率与门限因子存在对应关系,根据预设检测概率或预设虚警概率可确定相应的门限因子,根据杂波功率估计值和门限因子可确定平均判决门限,将待检测单元与平均判决门限进行比较后确定目标检测结果。
[0096]
需要说明的是,以上实施例的方案仅为本申请所提出的一种具体实现方案,其他根据最小单元的概率密度函数和预设概率值确定目标检测结果的配置方式均属于本申请的保护范围。
[0097]
为了提高目标检测结果的准确性,在本申请优选的实施例中,所述回波信号的一维距离像为经过平方律检波器后的一维距离像,各所述参考单元为统计独立同分布。
[0098]
为了确定可靠的目标数量和目标位置,在本申请一些实施例中,所述雷达传感器包括三发四收天线阵列,所述雷达传感器具体用于:
[0099]
根据所述目标检测结果确定所述室内空间是否存在目标,并在存在所述目标时确定所述目标到所述雷达传感器的距离;
[0100]
根据所述目标到两个接收天线的相位差确定所述目标的角度;
[0101]
根据所述角度和所述距离确定所述目标的坐标信息;
[0102]
基于聚类算法dbscan对所述坐标信息进行处理并确定所述目标数量和所述目标位置;
[0103]
其中,所述角度包括x轴方向的方位角度和俯仰角度,以及y轴方向的方位角度和俯仰角度。
[0104]
本实施例中,如图3所示,雷达传感器包括三发四收天线阵列,根据目标检测结果确定室内空间是否存在目标,并在存在目标时确定目标到雷达传感器的距离,预先估计出
目标到两个接收天线的相位差,根据该相位差确定所述目标的角度,然后根据角度和距离确定目标的坐标信息。角度包括x轴方向的方位角度和俯仰角度,以及y轴方向的方位角度和俯仰角度。
[0105]
由于检测过程时会出现不可避免的虚警和漏检的问题,需要对定位结果进行聚类,基于聚类算法dbscan(density-based spatial clustering of applications with noise,基于密度的聚类算法)对所述坐标信息进行处理并确定目标数量和目标位置。
[0106]
为了确定可靠的目标数量和目标位置,在本申请一些实施例中,所述雷达传感器还具体用于:
[0107]
获取与所述坐标信息对应的连续多帧的定位结果,从各所述定位结果中任取一个定位结果作为核心对象,并根据所述核心对象能够密度可达的样本集合确定一个聚类结果;
[0108]
从各所述定位结果中任取一个未被聚类的定位结果作为新的核心对象,并根据所述新的核心对象能够密度可达的样本集合确定一个新的聚类结果,并根据下一个新的核心对象确定下一个新的聚类结果,直至各所述定位结果中不存在未被聚类的定位结果;
[0109]
根据样本数量大于预设数量的聚类结果中样本的平均值确定所述目标数量和所述目标位置。
[0110]
在本申请具体的应用场景中,如图5所示,a表示核心对象,b、c表示边界点,n表示噪声点。在得到连续多帧定位结果后,首先任取其中一个定位结果作为核心对象,然后找到所有这个核心对象能够密度可达的样本集合,该集合即为一个聚类结果;接着继续选择另一个没有类别的核心对象去寻找密度可达的样本集合,这样就得到另一个聚类结果;最后,剔除结果中样本数量较少的聚类结果,根据样本数量大于预设数量的聚类结果中样本的平均值确定最终定位结果,根据最终定位结果确定目标数量和目标位置。
[0111]
需要说明的是,以上实施例的方案仅为本申请所提出的一种具体实现方案,其他基于聚类算法dbscan对坐标信息进行处理并确定目标数量和目标位置的配置方式均属于本申请的保护范围。
[0112]
为了提高目标检测结果的准确性,在本申请一些实施例中,所述雷达传感器还用于:
[0113]
基于对原始回波信号进行脉冲压缩确定所述原始回波信号的频域信号;
[0114]
根据动目标显示mti算法对所述频域信号进行处理并确定目标距离像;
[0115]
基于对所述目标距离像进行非相干积累的结果确定所述回波信号的一维距离像。
[0116]
本申请实施例中,原始回波信号可以包括12个通道,本实施例中的原始回波信号为lfmcw(linear frequency modulation continuous wave,线性调频连续波),是超大时宽信号,无法在时域上进行脉冲压缩处理,因此需要将信号变换到频域进行处理,对原始回波信号进行脉冲压缩确定原始回波信号的频域信号。
[0117]
原始回波信号中除了有噪声干扰外,还有大量的杂波信号。这些杂波信号主要雷达所处环境引起的,比如:地、墙壁、桌椅等其它家具。这些杂波信号与目标回波信号最大的不同之处在于多普勒。因此,可以在多谱勒域对其进行检测与抑制。根据mti(moving target indication,动目标显示)算法对所述频域信号进行处理并确定目标距离像。
[0118]
经过mti后,回波信号中有关环境中静止目标的信号已经被抑制,但是为了进一步
提高回波信号的信噪比,还需要对每一帧处理的数据进行非相干积累,基于对目标距离像进行非相干积累的结果确定回波信号的一维距离像。
[0119]
通过应用以上技术方案,在包括冷媒循环回路、压缩机、室外热交换器、室内热交换器、室内风扇、导风板、控制器和雷达传感器的空调器中,雷达传感器用于当接收到所述控制器发送的区域监控指令时,基于排序统计恒虚警率os-cfar算法对回波信号进行处理并确定目标检测结果;根据所述目标检测结果确定室内空间的目标数量和目标位置;将所述目标数量和所述目标位置发送到所述控制器,以使所述控制器根据所述目标数量控制所述室内风扇的转速,并根据所述目标位置确定所述导风板的角度,从而在保证用户隐私的基础上实现了准确送风,提高了用户体验。
[0120]
为了进一步阐述本发明的技术思想,现结合具体的应用场景,对本发明的技术方案进行说明。
[0121]
本申请实施例中提供一种空调器,包括冷媒循环回路、压缩机、室外热交换器、室内热交换器、室内风扇、导风板、控制器和雷达传感器,如图1所示,雷达传感器的信号处理流程包括以下步骤:
[0122]
步骤1:数据预处理
[0123]
12个通道的原始回波信号包括了大量的噪声信号和背景杂波信号,无法直接进行目标的测距或定位,所以要先进行雷达信号的预处理。
[0124]
a)脉冲压缩
[0125]
lfmcw雷达信号是超大时宽信号,无法在时域上进行脉冲压缩处理,因此需要将信号变换到频域进行处理。由于脉冲压缩可以将时域信号压缩到频率进行处理,极大地提高了回波信号的信噪比。该过程得到的信号增益为tb。其中t为扫频时宽,b为扫频带宽。
[0126]
b)mti
[0127]
回波信号中除了有噪声干扰外,还有大量的杂波信号。这些杂波信号主要雷达所处环境引起的,比如:地、墙壁、桌椅等其它家具。这些杂波信号与目标回波信号最大的不同之处在于多普勒。因此,可以在多谱勒域对其进行检测与抑制,采用了mti技术进行处理。
[0128]
步骤2:非相干积累与目标检测
[0129]
a)非相干积累
[0130]
经过mti后,回波信号中有关环境中静止目标的信号已经被抑制,但是为了进一步提高回波信号的信噪比,还需要对每一帧处理的数据进行非相干积累。
[0131]
上述脉冲压缩、mti、非相干积累为现有技术,对本领域技术人员来说是显而易见的,具体处理过程不再赘述。
[0132]
b)目标检测
[0133]
由于区域监控面临的是多目标检测问题,且在雷达俯视与雷达平视时的不同在于,俯视情况下目标更应该被看作一个面目标,因此就会导致同一个目标的不同高度的两个不同的散射点都会提供目标的位置信息,造成脉冲压缩后同一个目标的距离像出现不同距离的两个峰。为了在这种场景下实现目标的准确检测,本实施例采用os-cfar检测方法。
[0134]
假设接收机噪声和背景杂波服从高斯分布,其包络为瑞利分布,经过平方律检波器后,参考单元x
i
(i=1,2,...,r)服从指数分布,其pdf(probability density function,概率密度函数)和cdf(cumulative distribution function,累积分布函数)分别为:
[0135][0136]
f(x)=1-e-x/λ’,x≥0
ꢀꢀꢀꢀ
(2)
[0137]
其中,
[0138][0139]
μ代表总的杂波噪声功率水平,λ是信号与杂噪平均功率的比值;h0是不存在目标的假设,h1是目标存在的假设,自然指数e为自然对数的底数,是一个无限不循环小数。
[0140]
在均匀杂波背景中x
i
(i=1,2,...,r)是统计独立同分布的。
[0141]
os类cfar检测器是对参考单元从小到大作排序处理,在均匀背景情况下来自于r个总体样本中第k个最小单元的pdf为:
[0142][0143]
第k个最小单元的cdf为:
[0144][0145]
其中f(x)和f(x)分别代表均匀背景中参考单元x
i
(i=1,2,...,r)的pdf和cdf,r为参考单元的总数,最小单元为r中第k个单元。
[0146]
os_cfar检测器的结构如图2所示,其中cut是待检测单元。首先对参考单元按大小作排序处理,有:
[0147]
x
(1)
≤x
(2)
≤
…
≤x
(r)
ꢀꢀꢀꢀꢀꢀꢀ
(6)
[0148]
然后取第k个排序样本x
(k)
作为检测器对杂波功率估计值z,即:
[0149]
z=x
(k)
ꢀꢀꢀꢀꢀꢀꢀ
(7)
[0150]
那么,由(4)式可知在均匀杂波背景中z的pdf为:
[0151][0152]
所以,os_cfar在均匀杂波背景中的而检测概率p
d
和虚警概率p
fa
分别为:
[0153][0154][0155]
其中,γ(.)为伽马函数。
[0156]
由(8)式可得z的统计平均为:
[0157][0158]
所以,os_cfar检测器的平均判决门限adt为:
[0159]
[0160]
步骤3:目标区域估计
[0161]
a)目标距离估计
[0162]
由线性调频毫米波雷达的基本原理可知,经过步骤1中的脉冲压缩与步骤2中的目标检测后,即可得到目标与雷达之间的距离l。
[0163]
b)目标角度估计
[0164]
针对实际中采用的如图3所示的三发四收小孔径毫米波雷达天线阵列,本发明在进行功能开发时采用基于aoa(angle of arrival,到达角度测距)的角度估计方法。aoa是通过比较两天线接收信号的相位信息来确定目标角度的方法。以雷达在地面的投影点为坐标原点,向右为x轴正方向,向前为y轴正方向建立直角坐标系。以估计目标的方位角度为例,采用aoa进行目标角度估计的示意图如图4所示。
[0165]
设目标到两个接收天线的信号的相位差为φ,则相位差与目标的方位角度的关系为:
[0166][0167]
其中,d为两接收天线之间的间距。
[0168]
俯仰角度的估计与方位角度的估计方法类似,具体过程不再赘述。
[0169]
c)目标位置估计
[0170]
由以上两步中估计出的目标距离l、x轴方向角度以及y轴方向角度γ,即可通过下式计算出目标在地面的坐标x,y。
[0171][0172]
d)目标聚类
[0173]
由于检测过程时会出现不可避免的虚警和漏检的问题,需要对定位结果进行聚类。本实施例通过采用聚类方法dbscan,通过将一定范围内的定位结果作为一个目标的类,即可得到最终的定位结果。
[0174]
如图5所示,a表示核心对象,b、c表示边界点,n表示噪声点。在得到连续多帧定位结果后,首先任取其中一个定位结果作为核心对象,然后找到所有这个核心对象能够密度可达的样本集合,该集合即为一个聚类结果;接着继续选择另一个没有类别的核心对象去寻找密度可达的样本集合,这样就得到另一个聚类结果;最后,剔除结果中样本数量较少的聚类结果,再分别计算每个保留下来的类中样本的平均值,得到最终的定位结果,根据最终的定位结果确定目标数量和目标位置。
[0175]
与本申请实施例中的空调器相对应,本申请实施例还提出了一种空调器的控制方法,所述方法应用于包括冷媒循环回路、压缩机、室外热交换器、室内热交换器、室内风扇、导风板和控制器的空调器中,所述空调器还包括雷达传感器,如图6所示,所述方法包括:
[0176]
步骤s601,当接收到所述控制器发送的区域监控指令时,所述雷达传感器基于排序统计恒虚警率os-cfar算法对回波信号进行处理并确定目标检测结果。
[0177]
步骤s602,所述雷达传感器根据所述目标检测结果确定室内空间的目标数量和目标位置。
[0178]
步骤s603,所述雷达传感器将所述目标数量和所述目标位置发送到所述控制器,
以使所述控制器根据所述目标数量控制所述室内风扇的转速,并根据所述目标位置确定所述导风板的角度。
[0179]
为了确定准确的目标检测结果,在本申请一些实施例中,所述雷达传感器基于排序统计恒虚警率os-cfar算法对回波信号进行处理并确定目标检测结果,具体为:
[0180]
所述雷达传感器基于对所述回波信号的一维距离像中的参考单元进行排序确定有序样本序列,并确定所述有序样本序列中的最小单元;
[0181]
所述雷达传感器根据所述参考单元的概率密度函数和所述参考单元的累积分布函数确定所述最小单元的概率密度函数;
[0182]
所述雷达传感器根据所述最小单元的概率密度函数和预设概率值确定所述目标检测结果;
[0183]
其中,所述参考单元为待检测单元周围的预设数量的样本,所述参考单元和所述待检测单元的背景统计特性相同,所述预设概率值为预设检测概率或预设虚警概率。
[0184]
本申请实施例还提出了一种空调器的控制方法,所述方法应用于包括冷媒循环回路、压缩机、室外热交换器、室内热交换器、室内风扇、导风板和控制器的空调器中,所述空调器还包括雷达传感器,如图7所示,所述方法包括:
[0185]
步骤s701,所述控制器基于预设时间间隔定期向所述雷达传感器发送区域监控指令,并接收所述雷达传感器返回的室内空间的目标数量和目标位置。
[0186]
步骤s702,若所述目标数量不为零,所述控制器根据所述目标数量控制所述室内风扇的转速,并根据所述目标位置控制所述导风板的角度;
[0187]
步骤s703,若所述目标数量为零且保持预设时长,所述控制器控制所述空调器进入预设待机状态或关机。
[0188]
步骤s704,若所述目标数量不为零且所述空调器在关机状态,所述控制器控制所述空调器开启并使所述空调器进入预设运行模式。
[0189]
其中,所述目标数量和所述目标位置是所述雷达传感器基于排序统计恒虚警率os-cfar算法对回波信号进行处理后确定的。
[0190]
预设运行模式可以为预设制冷模式或预设制热模式。
[0191]
可选的,若所述目标数量为零且保持第一预设时长,所述控制器控制所述空调器进入预设待机状态;若所述目标数量为零且保持第二预设时长,所述控制器控制所述空调器关机,其中,所述第一预设时长小于所述第二预设时长,从而避免电能的浪费。
[0192]
最后应说明的是:以上实施例仅用以说明本申请的技术方案,而非对其限制;尽管参照前述实施例对本申请进行了详细的说明,本领域的普通技术人员当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不驱使相应技术方案的本质脱离本申请各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1