用于固定式反光板线聚焦集热器的跟踪装置及跟踪方法与流程
本发明涉及一种用于固定式反光板线聚焦集热器的跟踪装置及跟踪方法。
背景技术:
1、为了将太阳能转化为更高品位的热能,需要通过聚光方式来获得更高温度的工质,聚光方式包括线聚焦和点聚焦两种方式,线聚焦包括槽式和线性菲涅尔式,点聚焦包括塔式和碟式,其中线聚焦方式由于成本低、适用范围广而得到更多的推广应用。
2、聚光式太阳能集热装置离不开太阳光跟踪,太阳光跟踪方式主要包括视日运动跟踪法和光电跟踪法,视日运动跟踪法是一种主动式跟踪,根据预先存储的当地经纬度等数据与太阳运动的轨迹函数,及实时的精确时间信号,计算出接收器的位置,发出控制信号。光电跟踪法是一种被动式跟踪,根据太阳光跟踪传感器反馈的信号计算出偏差方向与角度,再根据偏差发出控制信号。
3、“反射固定式线聚焦集热单元及反射固定式线聚焦集热装(2021100520754)”、“采用转杆式调节接收器的反光板固定式聚光集热装置(2021100520769)”提出了反光板固定放置的太阳能线聚焦集热器,相对于槽式、线性菲涅尔式降低了建造成本和运行成本,同时有较高的单位占地面积太阳能利用率。
4、但是这种集热器跟踪角度模型复杂,与集热器的设计参数、所在的地理位置等参数有关,建立高精度跟踪模型较为困难;而且此类集热器的优势是低成本,安装精度及控制设备精度一般不高,所以不适宜采用对设备精度要求高的视日运动跟踪法。
5、反光板固定放置的太阳能线聚焦集热器在跟踪控制上与现有的其他类似的聚光集热器的区别主要包括两方面:一是接收器是移动的,不同于菲涅尔线聚焦和塔式的固定式接收器,同时接收器相对于反光板在转动,不同于槽式和碟式的固定式反光板;二是光斑的分布是复杂和变化的模型,不同于目前聚光集热器的中间强两侧弱的近正态分布的光斑,所以现有的光电跟踪法的跟踪控制装置及跟踪控制计算模型(方法)不适合使用在此类集热器上,或者说会出现较大的光学损失。上述问题限制了反光板固定式线聚焦集热器的进一步推广应用。
技术实现思路
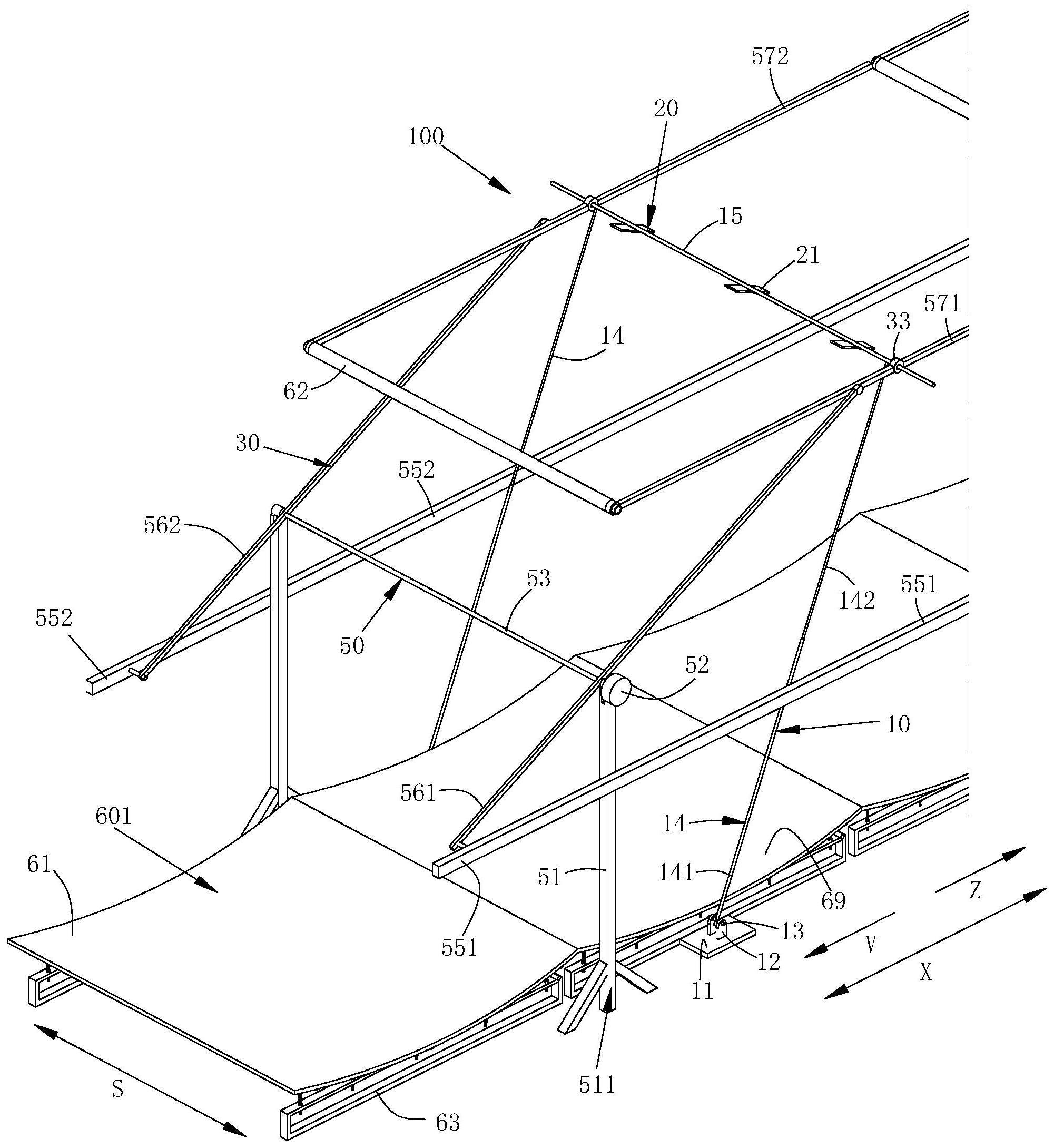
1、为解决上述问题,本技术首先提出了一种用于固定式反光板线聚焦集热器的跟踪装置,其特征在于,包括:角度调节模块、太阳光感应模块和驱动模块;
2、该角度调节模块包括基座和摆动架,该摆动架包括伸缩杆和感应单元固定杆,该伸缩杆的一端经转轴转动地安装在该基座上,伸缩杆远离基座的一端固定安装在感应单元固定杆上,该感应单元固定杆沿第一轴线方向延伸;该固定式反光板线聚焦集热器的一块反光板作为基准反光板,该基准反光板与该转轴均沿第一轴线方向延伸;该感应单元固定杆的中轴线和转轴的中轴线位于第一虚拟平面内;该第一轴线方向沿水平方向延伸;
3、该太阳光感应模块包括固定安装在感应单元固定杆上的至少两块感应单元,该至少两块感应单元相互平行,且该至少两块感应单元沿第一轴线方向间隔设置;每块感应单元均包括一基板和固定在该基板上的感应片,该基板固定安装在感应单元固定杆上,基板具有一朝向基准反光板的安装面,该安装面位于感应单元固定杆朝向基准反光板的一侧,该安装面垂直于该第一虚拟平面,且安装面平行于转轴的中轴线;该第一虚拟平面将安装面分割为两个安装子面,在每一安装子面上均至少安装有一块感应片,感应片呈沿第一轴线方向延伸的矩形片状;同一基板上的感应片相互平行、且沿垂直于第一轴线的方向布置,相邻的感应片抵靠在一起,所有感应单元上的感应片的采光面均位于同一平面上;
4、同一基板的两个安装子面上的感应件的数量相同,且同一基板的两个安装子面上的感应片的安装位置相对于该第一虚拟平面对称设置;
5、该驱动模块包括驱动杆,该驱动杆的一端转动地连接在摆动架上,该驱动杆的另一端连接到固定式反光板线聚焦集热器的转动装置上;该转动装置能够经驱动杆带动该摆动架绕该转轴转动。具体地,感应片为太阳能电池片或光敏二极管。
6、包括基准反光板在内的所有反光板的反光面均为向下凹陷的弧形面,反光面均沿第一轴线方向延伸。优选所有的感应单元上的感应片的数量均相同。
7、具体地,优选每个安装子面上均具有2~6个感应片。优选感应单元为长方形的板状结构。太阳光感应模块包括2~10个感应单元。
8、本技术中,设置了针对反光板所反射的太阳光进行检测的感应单元,由于感应单元固定杆接收器一起转动时,使得感应单元固定杆上的感应单元能够同步绕基座进行转动,保证感应单元上的感应片始终对着反光板,能够对反光板所反射的太阳光进行检测,以控制接收的转动方向,使得接收器的转动速度能够与太阳位置的变化更为同步。
9、由于驱动杆连接在固定式反光板线聚焦集热器的转动装置上,无需对感应单元固定杆设置单独的转动装置。由于感应单元固定在感应单元固定杆上,自身并不转动,具有稳定性高和可靠性好的优点。
10、太阳光感应模块包含多个感应单元、每个感应单元包含多个感应片,构成多个监测点,避免了单个感应单元的误差和偶然因素对跟踪判断造成影响。
11、该跟踪装置能够直接加装在现有的固定式线聚焦集热装置单元或阵列上,兼容性好,安装、更换、调整及使用方便,且结构简易,成本低,且通用性高。
12、进一步,在垂直于第一虚拟平面的方向上,每个安装子面的长度的长度均大于接收器的半径;且在每个安装子面上,距离第一虚拟平面最远的感应片与第一虚拟平面之间的净距离大于接收器的半径。该设计使得感应片与接收器能够更趋向于接收到同样强度的光照,使得对接收器位置的控制更加精确。
13、进一步,为使感应片所接收到的反光与接收器所接收的反光更加一致,感应单元固定杆的中轴线到感应片朝向基准反光板的一侧的距离≤接受器的半径。在具体实施中,感应单元固定杆的中轴线到感应片朝向基准反光板的一侧的距离尽量减少,优选感应单元固定杆的中轴线到感应片朝向基准反光板的一侧的距离为0。
14、进一步,为使感应单元能够更加精确地接受基准反光板所反射的太阳光,该转轴的中轴线经过基准反光板的反光面的径向截面的中心点。
15、进一步,为减少跟踪装置对固定式反光板线聚焦集热器的热能采集效率的影响,提高单位面积的热能效率,当沿第一轴线方向,固定式反光板线聚焦集热器中的反光板至少具有两排时,感应单元固定杆与在第一轴线方向上相邻的接收器转动地连接在一起。该设计使得每个固定式反光板线聚焦集热器仅占用一块反光板,即可完成对整个固定式反光板线聚焦集热器中的接收器的控制,最大限度地降低跟踪装置的占地成本。
16、具体地,为便于接收器的进出水管顺利地连接到与感应单元固定杆相连接的一端上,
17、在第一轴线方向上,感应单元固定杆经一过渡管连接在相邻的接收器上,该过渡管的一端固定连接在接收器上,感应单元固定杆经轴承转动地安装在过渡管的另一端上,在该过渡管的管壁上开设有穿管孔,进出水管能够经该穿过孔连通接收器。其中的轴承具体可以采用滑动轴承或滚动轴承,当采用滚动轴承时,优选采用一对滚动轴承。
18、为进一步简化设备结构,固定式反光板线聚焦集热器的摆动杆同时作为驱动杆。
19、进一步,为使感应单元与接收所接收到的反射阳光的强度更加趋向于一致,感应单元固定杆相对于基准反光板的位置与接受器相对于所对应的反光板的位置相同。
20、其次,本技术还公开了用于固定式反光板线聚焦集热器的跟踪方法,该跟踪方法采用上述的跟踪装置,以第一虚拟平面为界,将每个感应单元分割为两个侧部,其中朝向第一方向的侧部称为第一侧部,朝向第二方向的侧部称为第二侧部,第一方向和第二方向均沿水平方向延伸且朝向相反,且第一方向和第二方向均垂直于第一轴线方向;该跟踪方法包括如下步骤:
21、(1)判断第一侧部和第二侧部上位于光斑边缘位置上的感应片的序号:
22、沿第一方向,当第一侧部上的第y个感应片满足公式tly>c·tmax>tl(y+1)时,则该第y个感应片为第一侧部上的位于光斑边缘位置上的感应片,y为沿第一方向,第一侧部上位于光斑边缘位置上的感应片的序号,无单位;当第一侧部上,任意一个感应片均不满足公式tly>c·tmax>tl(y+1)时,取y为1;
23、沿第二方向,当第二侧部上的第x个感应片满足公式trx>c·tmax>tr(x+1)时,则该第x个感应片为第二侧部上的位于光斑边缘位置上的感应片;x为沿第二方向,第二侧部上位于光斑边缘位置上的感应片的序号,无单位;当第二侧部上,任意一个感应片均不满足公式trx>c·tmax>tr(x+1)时,取x为1;
24、第一侧部和第二侧部上的感应片的序号均由第一虚拟平面开始,分别朝第一方向和第二方向排列,即第一侧部上的感应片的序号由第一虚拟平面开始,按照1、2、3……的次序排列;第二侧部上的感应片的序号也由第一虚拟平面开始,按照1、2、3……的次序排列;
25、tly为第一侧部上的第y个感应片的光能功率,单位为w;
26、tl(y+1)为第一侧部上的第y+1个感应片的光能功率,单位为w;
27、trx为第二侧部上的第x个感应片的光能功率,单位为w;
28、tr(x+1)为第二侧部上的第x+1个感应片的光能功率,单位为w;
29、tmax为感应单元上,光能功率最大的感应片的光能功率,单位为w;
30、c为设定的参数,无单位;
31、(2)确定接收器的转向:
32、当向转动装置发出将接收器朝第二方向转动α角度的命令;
33、当向转动装置发出将接收器朝第一方向转动α角度的命令;
34、当使接收器保持不动;
35、其中:
36、j为1到u的整数,u为感应单元的数量;
37、tri为第二侧部上的第i个感应片的光能功率,单位为w;
38、tli为第一侧部上的第i个感应片的光能功率,单位为w;
39、i为1到n的整数,n为第一侧部及第二侧部上的感应片的数量;即第一侧部和第二侧部上的感应片的数量相同,均为n个;
40、tr(r+1)为沿第二方向,第二侧部上的第r+1个感应片的光能功率,单位为w;
41、tl(r+1)为沿第一方向,第一侧部上的第r+1个感应片的光能功率,单位为w;
42、r为感应单元的第一侧部和第二侧部上的半径端感应片的序号,该半径端感应片朝向第一虚拟平面的边缘到第一虚拟平面的距离<接收器的半径,且半径端感应片远离第一虚拟平面的边缘到第一虚拟平面的距离≥接收器的半径;
43、k1和k2均为设定的参数,k1无单位,k2的单位为w;
44、e为设定的参数,单位w;
45、α为接收器转动的最小单位角度,单位为°。
46、具体地,k1取值范围为0~50,k2取值范围为0~100w,e取值范围为0~100w,α取值范围为0.02~2°,c取值范围为0.05~0.5。
47、目前,现有的固定式反光板线聚焦集热器主要采用光电跟踪法,光电跟踪法所采用的跟踪控制逻辑是:通过测量多个点,选择能量最大的位置作为接收器移动的目标,称之为接收器中心能量最大法。
48、由于固定式反光板线聚焦集热器的能量分布的特殊性,高能量密度区分布在光斑边缘,接收器中心能量最大法不适合于固定式反光板线聚焦集热器。
49、本技术和现有的接收器中心能量最大法的特点如表1所示。
50、表1两种跟踪控制逻辑用于固定式反光板线聚焦集热器时的主要特点对比表
51、
52、表1中的☆数量表示相应功能的优势,☆数量越多,表示相应功能的优势越明显。
53、由表1可以看出,接收器中心能量最大法在用于固定式反光板线聚焦集热器时,总体效果较差,采用本技术中的跟踪方法后,由于感应片始终对着反光板,能够对反光板所反射的太阳光进行检测,以控制接收的转动方向,使得接收器的转动方向能够与太阳位置的变化方向同步,由于采用了间断式的控制方式,在恰当设定接收器转动的最小单位角度α后,则可使接收器的转动与太阳位置的变化同步,同时采用的控制逻辑具有偏差裕量大、抗偏差能量强、光能功率密度高、判断错误率低等特点,使得接收器能够最大限度地吸收太阳光。
- 还没有人留言评论。精彩留言会获得点赞!