风机系统监控方法、介质及油烟机与流程
本发明涉及油烟机领域,尤其涉及一种风机系统监控方法、介质及油烟机。
背景技术:
1、风机系统是整个油烟机的核心动力部件,风机系统包括蜗壳、叶轮和电机等部件,电机是风机系统的动力来源,叶轮装配于电机轴上,电机通过电机安装支架连接于蜗壳后盖,电机安装支架焊接于蜗壳后板。风机系统的进风区域中心通常与油烟机整机的中心重合或者位于油烟机整机的正中心位置,进风区域面积大小影响着吸油烟效果。
2、在油烟机的实际运行过程中,由于风机系统是通过蜗壳安装支架固定在顶后板,电机通过电机安装支架连接到蜗壳后盖,因此,电机在转动过程中,电机激励本体分别会在轴向(即电机轴的延伸方向)、径向(即电机的旋转方向)和切向(即垂直于轴向的方向)这三个方向上产生位移偏离量,这三个方向的位移偏离量传递到蜗壳前盖和蜗壳后盖,导致蜗壳前盖和蜗壳后盖分别各自形成在上述三个方向的振动,影响进风区域面积,致使进风区域的气流运行不稳定,降低了吸油烟效果。
技术实现思路
1、本发明所要解决的第一个技术问题是针对上述现有技术提供一种风机系统监控方法。该风机系统监控方法可以对运行中风机系统的进风区域面积大小做出调整,以提高吸油烟机的吸油烟效果。
2、本发明所要解决的第二个技术问题是提供一种实现上述风机系统监控方法的可读存储介质。
3、本发明所要解决的第三个技术问题是提供一种应用有上述风机系统监控方法的油烟机。
4、本发明解决第一个技术问题所采用的技术方案为:风机系统监控方法,其特征在于,包括:
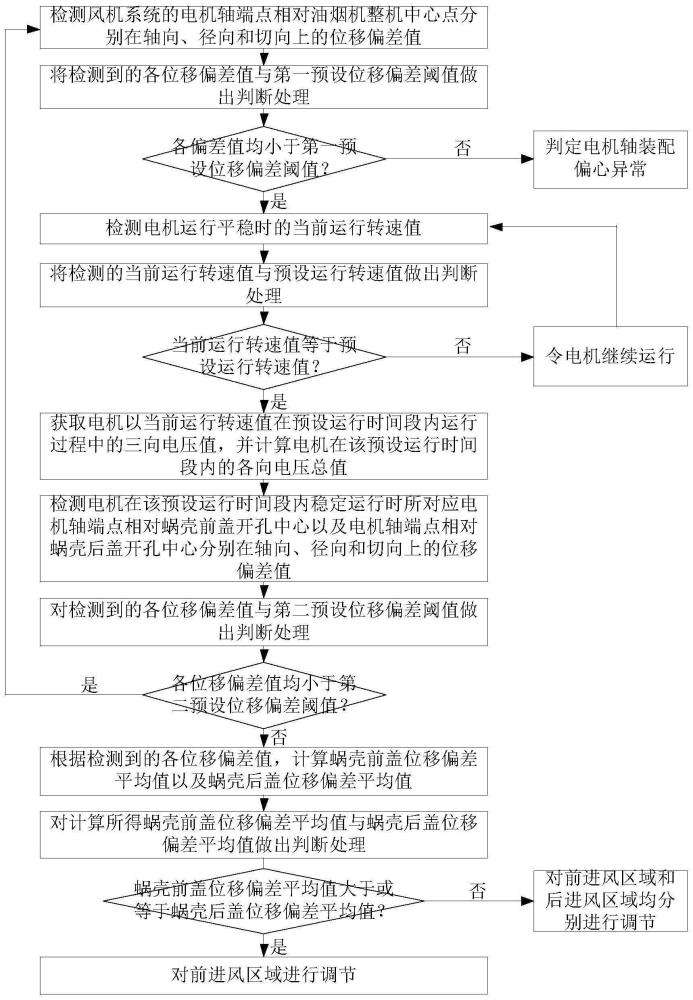
5、步骤1,检测风机系统的电机轴端点相对油烟机整机中心点分别在轴向、径向和切向上的位移偏差值;其中,电机轴的延伸方向为轴向,电机的旋转方向为径向,垂直于轴向的方向为切向;
6、步骤2,将检测到的各位移偏差值与第一预设位移偏差阈值做出判断处理:
7、当各位移偏差值均小于第一预设位移偏差阈值时,转入步骤3;否则,判定电机轴装配偏心异常;
8、步骤3,检测电机运行平稳时的当前运行转速值;
9、步骤4,将检测的当前运行转速值与预设运行转速值做出判断处理:
10、当该当前运行转速值等于预设运行转速值时,转入步骤5;否则,令电机继续运行,并转入步骤3;
11、步骤5,获取电机以当前运行转速值在预设运行时间段内运行过程中的三向电压值,并计算电机在该预设运行时间段内的各向电压总值;其中,电机的三向电压值为电机的三个端向电压;
12、步骤6,检测电机在该预设运行时间段内稳定运行时所对应电机轴端点相对蜗壳前盖开孔中心以及电机轴端点相对蜗壳后盖开孔中心分别在轴向、径向和切向上的位移偏差值;
13、步骤7,对检测到的各位移偏差值与第二预设位移偏差阈值做出判断处理:
14、当各位移偏差值均小于第二预设位移偏差阈值时,转入步骤1;否则,转入步骤8;
15、步骤8,根据检测到的各位移偏差值,计算蜗壳前盖位移偏差平均值以及蜗壳后盖位移偏差平均值;
16、步骤9,对计算所得蜗壳前盖位移偏差平均值与蜗壳后盖位移偏差平均值做出判断处理:
17、当蜗壳前盖位移偏差平均值大于或等于蜗壳后盖位移偏差平均值时,对前进风区域进行调节;否则,对前进风区域和后进风区域均分别进行调节。
18、改进地,在所述风机系统监控方法中,对所述前进风区域的调节过程包括如下步骤a1~a3:
19、步骤a1,获取蜗壳前盖的开孔圆心相对电机轴端点在轴向上的最大位移偏差值和最小位移偏差值、在径向上的最大位移偏差值和最小位移偏差值以及在切向上的最大位移偏差值和最小位移偏差值,并分别计算轴向上的位移偏差平均值、径向上的位移偏差平均值和切向上的位移偏差平均值;
20、步骤a2,分别计算所得各方向上最大位移偏差值与对应方向上位移偏差平均值之间的差值以及各方向上最小位移偏差值与对应方向上位移偏差平均值之间的差值,并分别选出同一方向上的最大差值;其中,该各方向包括轴向、径向和切向;
21、步骤a3,调整电机的工作电压,并令电机以调整后工作电压运行,直到所选出各方向上的最大差值均为预设差值。
22、进一步地,在所述风机系统监控方法中,对所述后进风区域的调节过程包括如下步骤b1~b3:
23、步骤b1,获取蜗壳后盖的开孔圆心相对电机轴端点在轴向上的最大位移偏差值和最小位移偏差值、在径向上的最大位移偏差值和最小位移偏差值以及在切向上的最大位移偏差值和最小位移偏差值,并分别计算轴向上的位移偏差平均值、径向上的位移偏差平均值和切向上的位移偏差平均值;
24、步骤b2,分别计算所得各方向上最大位移偏差值与对应方向上位移偏差平均值之间的差值以及各方向上最小位移偏差值与对应方向上位移偏差平均值之间的差值,并分别选出同一方向上的最大差值;其中,该各方向包括轴向、径向和切向;
25、步骤b3,调整电机的工作电压,并令电机以调整后工作电压运行,直到所选出各方向上的最大差值均为预设差值。
26、再改进,在所述风机系统监控方法中,所述电机的工作电压调整方式如下:
27、u'x,y,z=(1+β%·ts)·ux,y,z;
28、其中,u'x,y,z为调整后的电机工作电压,ux,y,z为调整前的电机工作电压,β为电机工作电压的调节率,0<β≤100%,ts为电机工作电压的调节次数。
29、再改进,在所述风机系统监控方法中,所述蜗壳前盖位移偏差平均值和所述蜗壳后盖位移偏差平均值的计算方式分别如下:
30、
31、
32、其中,lf为蜗壳前盖位移偏差平均值,lf,x为电机轴端点相对蜗壳前盖开孔中心在轴向上的位移偏差值,lf,y为电机轴端点相对蜗壳前盖开孔中心在径向上的位移偏差值,lf,z为电机轴端点相对蜗壳前盖开孔中心在切向上的位移偏差值,l0为位移偏差基准值,l0≠0;
33、lb为蜗壳后盖位移偏差平均值,lb,x为电机轴端点相对蜗壳后盖开孔中心在轴向上的位移偏差值,lb,y为电机轴端点相对蜗壳后盖开孔中心在径向上的位移偏差值,lb,z为电机轴端点相对蜗壳后盖开孔中心在切向上的位移偏差值。
34、改进地,在所述风机系统监控方法中,在步骤5中,所述电机在预设运行时间段内的各向电压总值计算方式分别如下:
35、电机在预设运行时间段内的轴向电压总值标记为ux,fs为针对电压值的采样频率,ns为在所述预设运行时间段内按照采样频率fs所采集到电压值的总数量,ux,n为在所述预设运行时间段内采集到的第n个轴向电压值;
36、电机在预设运行时间段内的径向电压总值标记为uy,fs为针对电压值的采样频率,ns为在所述预设运行时间段内按照采样频率fs所采集到电压值的总数量,uy,n为在所述预设运行时间段内采集到的第n个径向电压值;
37、电机在预设运行时间段内的切向电压总值标记为uz,fs为针对电压值的采样频率,ns为在所述预设运行时间段内按照采样频率fs所采集到电压值的总数量,uz,n为在所述预设运行时间段内采集到的第n个切向电压值。
38、本发明解决第二个技术问题所采用的技术方案为:可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时,实现任一项所述的风机系统监控方法。
39、本发明解决第三个技术问题所采用的技术方案为:油烟机,其特征在于,应用有任一项所述的风机系统监控方法。
40、与现有技术相比,本发明的优点在于:该发明的风机系统监控方法通过将检测到的电机轴端点相对油烟机整机中心点分别在轴向、径向和切向上的位移偏差值与第一预设位移偏差阈值做比较,一旦各方向的位移偏差值均小于第一预设位移偏差阈值,就把电机运行平稳时的当前运行转速值与预设运行转速值比较,在当前运行转速值大于预设运行转速值时,计算电机以当前运行转速在预设运行时间段内的各向电压总值,再检测电机在预设运行时间段内稳定运行时所对应电机轴端点相对蜗壳前盖开孔中心以及电机轴端点相对蜗壳后盖开孔中心分别在轴向、径向和切向上的位移偏差值,且当各位移偏差值不满足均小于第二预设位移偏差阈值时,判断计算所得蜗壳前盖位移偏差平均值大于或等于蜗壳后盖位移偏差平均值时,对前进风区域进行调节;否则,对前进风区域和后进风区域均分别进行调节。如此,实现了针对风机运行过程中因电机三向振动不平衡所导致进风区域偏移的调节,确保了风机的进风区域不受电机三向振动影响。
- 还没有人留言评论。精彩留言会获得点赞!