一种用于光伏清洗车调节高度和范围的控制系统的制作方法
[0001]
本发明涉及光伏清洗领域,尤其是一种用于光伏清洗车调节高度和范围的控制系统。
背景技术:
[0002]
随着光伏产业的不断壮大以及光伏产业的商业化,光伏电站在运营管理中的各种问题也开始突显,尤其是直接关系到发电效率的光伏组件的清洁问题。
[0003]
对于大型光伏并网电站的运营,发电量是至关重要的指标之一,而影响发电量的因素除了逆变器、变压器、电缆等设备的损耗外,当属空气中灰尘对发电量的影响,严重的局部遮盖还会导致“热斑效应”。灰尘对光伏组件性能会产生负面影响,甚至光伏组件上的局部阴影也会引起输出功率的明显减少。根据美国国家航空航天局研究显示:每m2仅有4.05g的灰尘层就能减少太阳能转换 40%,尤其是环境条件较差的北方地区,影响更加明显。
[0004]
目前光伏电站清洗市场主要采用人工或者第三方团队进行清洗的模式,其清洗效率低,价格昂贵,耗水量高,极大的增加了光伏电站的运维成本。
技术实现要素:
[0005]
鉴于上述状况,有必要提供一种具有同时调节高度和范围且清洁效率高、自动化程度高的用于光伏清洗车的控制系统。
[0006]
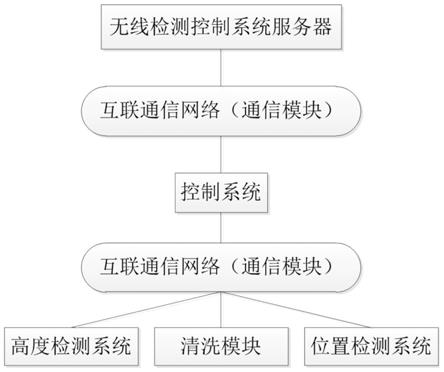
一种用于光伏清洗车调节高度和范围的控制系统,包括光伏清洗车、高度检测系统、位置检测系统、控制系统和通信模块,光伏清洗车的活动臂上设置清洗模块,清洗模块用于对光伏板进行清洗,光伏清洗车用于驱动清洗模块在光伏板上移动;高度检测系统设置于清洗模块上,高度检测系统用于检测高度检测系统至光伏板之间的距离,进而计算出清洗模块与光伏板之间的距离;位置检测系统设置于清洗模块上,位置检测系统用于检测清洗模块是否偏离光伏板;控制系统设置于光伏清洗车中,控制系统用于接收高度检测系统和位置检测系统发送的检测信号,并对检测信号进行处理,从而判断清洗模块与光伏板之间的距离是否在预设值之内、判断清洗模块是否偏离光伏板,同时对光伏清洗车进行相应的调整;通信模块设置于清洗模块上,通信模块用于控制系统和高度检测系统、位置检测系统之间的通信。
[0007]
优选的,通信模块包括wifi无线通信模块,位置检测系统和高度检测系统分别连接wifi无线通信模块,wifi无线通信模块用于在控制系统和位置检测系统、高度检测系统之间通信,将从位置检测系统和高度检测系统接收到的检测信号发送给控制系统。
[0008]
优选的,高度检测系统包括超声波雷达系统,超声波雷达系统包括微处理单元、一个或多个超声波发射探头和一个或多个超声波接收探头,微处理单元分别连接超声波发射探头和超声波接收探头。
[0009]
优选的,微处理单元,连接wifi无线通信模块,用于对控制超声波发射探头发射超
声信号,并对从超声波接收探头中接收到的信号进行处理。
[0010]
优选的,位置检测系统包括ccd系统,ccd系统连接wifi无线通信模块。
[0011]
优选的,ccd系统包括ccd、ccd镜头和ccd光源,ccd光源发射的光线经过ccd镜头照射到ccd,ccd连接wifi无线通信模块。
[0012]
优选的,通信模块包括wifi连接功能模块,wifi连接功能集成在光伏清洗车中,wifi连接功能模块连接控制系统,wifi连接功能模块用于接收wifi 无线通信模块发送的检测信号并将检测信号传输至控制系统中。
[0013]
优选的,光伏清洗车中设置触摸屏显示模块,控制系统连接触摸屏显示模块,控制系统接收检测信号进行处理,比较检测信号与预设值,将比较结果存储于控制系统中的存储单元,并实时将比较结果通过触摸屏显示,控制光伏清洗车对清洗模块进行调整。
[0014]
优选的,设置无线检测控制系统服务器,无线检测控制系统服务器用于接收控制系统发送的处理后的数据,无线检测控制系统服务器集成在具有wifi通信功能的笔记本电脑、平板电脑或手机中。
[0015]
优选的,清洗模块包括刷辊、u型连接架和驱动装置,u型连接架开口两端通过轴承分别可转动连接刷辊旋转轴,u型连接架相对开口一侧连接光伏清洗车的活动臂,驱动装置用于驱动刷辊转动。
[0016]
上述用于光伏清洗车调节高度和范围的控制系统,通过高度检测系统对光伏板至高度检测系统之间的距离进行检测,并通过控制系统对数据进行处理、与预设值进行比对和对光伏清洗车上的清洗模块的调节,使得刷辊始终压在光伏板上,保证了清洗模块对光伏板进行高效的清洗;
[0017]
通过位置检测系统对光伏板和清洗模块之间相对位置的检测,并通过控制系统对数据进行处理、与预设值进行比对和对光伏清洗车的清洗模块的调节,使得刷辊始终保持在光伏板上,保证了清洗模块对光伏板进行高效的清洗;
[0018]
结合上述的高度检测系统和位置检测系统,即可对刷辊和光伏板的相对位置进行调节,达到对光伏板进行高效的清洗目的,而且通过控制系统控制光伏清洗车对光伏板进行清洁,避免了雇佣人工或第三方团队进行清洗,由于本发明是自动化的,清洗效率更高,节省了大量的雇佣花费,同时利用刷辊的高速旋转对光伏板进行清洁,避免了在清洁过程中消耗大量的水资源,降低了光伏电站的运维成本。
附图说明
[0019]
图1是本发明用于光伏清洗车调节高度和范围的控制系统的结构框图;
[0020]
图2是本发明超声波雷达系统的结构框图;
[0021]
图3是本发明用于光伏清洗车调节高度和范围的控制系统的工作流程图。
具体实施方式
[0022]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明用于光伏清洗车调节高度和范围的控制系统进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0023]
请参见图1-3,本发明一种用于光伏清洗车调节高度和范围的控制系统,包括光伏
清洗车、高度检测系统、位置检测系统、控制系统和通信模块,光伏清洗车的活动臂上设置清洗模块,清洗模块用于对光伏板进行清洗,光伏清洗车用于驱动清洗模块在光伏板上移动;高度检测系统设置于清洗模块上,高度检测系统用于检测高度检测系统至光伏板之间的距离,进而计算出清洗模块与光伏板之间的距离;位置检测系统设置于清洗模块上,位置检测系统用于检测清洗模块是否偏离光伏板;控制系统设置于光伏清洗车中,控制系统用于接收高度检测系统和位置检测系统发送的检测信号,并对检测信号进行处理,从而判断清洗模块与光伏板之间的距离是否在预设值之内、判断清洗模块是否偏离光伏板,同时对光伏清洗车进行相应的调整;通信模块设置于清洗模块上,通信模块用于控制系统和高度检测系统、位置检测系统之间的通信。
[0024]
具体的,通信模块可以为有线通信,也可以为无线通信。
[0025]
具体的,光伏清洗车为挖掘机式光伏清洗车。
[0026]
具体的,控制系统可包括arm控制系统和数据存储单元。
[0027]
一种实施例中,通信模块包括wifi无线通信模块,位置检测系统和高度检测系统分别连接wifi无线通信模块,wifi无线通信模块用于在控制系统和位置检测系统、高度检测系统之间通信,将从位置检测系统和高度检测系统接收到的检测信号发送给控制系统。
[0028]
其中,高度检测系统包括超声波雷达系统,超声波雷达系统包括微处理单元、一个或多个超声波发射探头和一个或多个超声波接收探头,微处理单元分别连接超声波发射探头和超声波接收探头。
[0029]
具体的,微处理单元,连接wifi无线通信模块,用于对控制超声波发射探头发射超声信号,并对从超声波接收探头中接收到的信号进行处理。
[0030]
具体的,微处理单元包括微处理器、信号发生电路和功率放大器,该微处理器采用单片机或者dsp或者fpga,信号发生电路为输出信号频率可编程的定时器,还包括模数转换功能的ad端口。
[0031]
具体的,微处理器通过信号发生电路连接功率放大器,功率放大器连接超声波发射探头,超声波发射探头用于将微处理单元控制信号发生电路产生并经过功率放大的信号发射出去。
[0032]
具体的,微处理单元还包括乘法器和信号处理电路。
[0033]
具体的,微处理器和超声波接收探头之间设置乘法器和信号处理电路,超声波接收探头将信号发送至乘法器,乘法器同时接收信号发生电路发出的发射信号,乘法器输出的相乘后信号经过信号处理电路进行滤除、放大和补偿,最后从微处理器上的模数转换功能ad端口输入至微处理器中,进行模数转换后将数据发送至wifi无线通信模块。
[0034]
具体的,所述信号处理电路包括低通滤波器、放大器和高通滤波器,低通滤波器、放大器和高通滤波器分别用于滤波、放大和补偿,其三者相互级联但级联顺序无需特别限定。
[0035]
其中,位置检测系统包括ccd系统,ccd系统连接wifi无线通信模块。
[0036]
具体的,ccd系统包括ccd、ccd镜头和ccd光源,ccd光源发射的光线经过ccd镜头照射到ccd,ccd连接wifi无线通信模块。
[0037]
具体的,ccd对抓取的图像进行处理,并将处理后的数据发送至wifi无线通信模块。
[0038]
具体的,通信模块包括wifi连接功能模块,wifi连接功能集成在光伏清洗车中,wifi连接功能模块连接控制系统,wifi连接功能模块用于接收wifi 无线通信模块发送的检测信号并将检测信号传输至控制系统中。
[0039]
具体的,光伏清洗车中设置触摸屏显示模块,控制系统连接触摸屏显示模块,控制系统接收从wifi无线通信模块发出的携带高度检测信号和位置检测信号,比较各个检测信号与对应的预设值,将比较结果存储于控制系统中的存储单元,并实时将比较结果通过触摸屏显示模块显示,根据比较结果控制光伏清洗车对清洗模块进行调整。
[0040]
具体的,设置无线检测控制系统服务器,无线检测控制系统服务器用于接收控制系统中对数据的处理过程和处理结果,并进行备份存储,同时用于控制控制系统,其功能包括但不限于对控制系统中的预设值进行设置、对数据进行存储和对控制系统进行初始化,无线检测控制系统服务器集成在具有wifi通信功能的笔记本电脑、平板电脑或手机中。
[0041]
具体的,在集成了无线检测控制系统服务器的笔记本电脑、平板电脑或手机中,安装特定的软件,通过软件的ui操作界面对无线检测控制系统服务器进行操作控制。
[0042]
具体的,上述的wifi通信模块选用的是捷稀(jcg)型号为ac860的无线路由器,1900m双频(2.4g和5g频段)并发6t6r高效数据处理。
[0043]
具体的,清洗模块包括刷辊、u型连接架和驱动装置,u型连接架开口两端通过轴承分别可转动连接刷辊旋转轴,u型连接架相对开口一侧连接光伏清洗车的活动臂,驱动装置用于驱动刷辊转动。
[0044]
具体的,高度检测系统设置两组,分别设置于对应刷辊两端的u型连接架上,用于同时检测刷辊两端是否符合预设值,避免一端翘起而影响清洁进程和效率。
[0045]
具体的,位置检测系统设置两组,分别设置于对应刷辊两端的u型连接架上,用于同时检测刷辊两端是否均在光伏板上,避免刷辊一端脱离光伏板而导致部分光伏板没被刷辊覆盖,影响清洁进程和效率。
[0046]
具体的,驱动装置包括旋转电机和皮带传动组件,旋转电机设置在u型连接架上,旋转电机通过皮带传动组件连接刷辊旋转轴,以驱动刷辊旋转。
[0047]
具体的,皮带传动组件包括分别设置在旋转电机输出端和刷辊旋转轴上的两组皮带轮与设置在两组皮带轮之间的皮带。
[0048]
具体的,旋转电机和wifi无线通信模块之间设置控制芯片和继电器,旋转电机通过继电器连接控制芯片,控制芯片连接wifi无线通信模块,控制系统通过通信模块对旋转电机的启或闭进行控制。
[0049]
具体的,wifi无线通信模块接收到控制旋转电机启或闭的命令后,将信号发送给控制芯片,控制芯片通过发送高低电平控制继电器启或闭,使得旋转电机连通或断开电源。
[0050]
优选的,超声波发射探头和超声波接收探头处于同一平面内,且所述平面平行于光伏板,若超声波发射探头与超声波接收探头所在平面到与刷辊顶部相切的平面之间的距离为x,毛刷直径为d,那么刷辊工作时,超声波发射探头与超声波接收探头所在平面与光伏板之间的距离p为d+x-30,使得刷辊保持对光伏板具有挤压作用力,此时刷辊在转动时对光伏板的具有更大的摩擦力,达到更好的清洁效果,以上数据的单位为厘米。
[0051]
本实施例的原理为:通过在集成了无线检测控制系统服务器的笔记本电脑中,对无线检测控制系统服务器进行控制,初始化控制系统并对控制系统中的预设值进行确定或
者修改,控制光伏清洗车行驶至光伏板清洗预设位置,控制系统自运行,控制系统控制活动臂驱动清洗模块至预设值指定的位置,并控制高度检测系统和位置检测系统进行工作,同时对传回的数据进行比较处理,实时调整光伏清洗车中的清洗模块和光伏板之间的位置,直至清洗模块与光伏板之间的距离和位置达到相应的预设值,此时控制系统控制光伏清洗车沿光伏板的长度方向移动,同时控制驱动装置驱动刷辊转动,以达到清洗模块对光伏板的全面清洗,避免清洗模块与光伏板之间无接触或者脱离光伏板而导致清洗效果达不到要求,影响光伏板的发电效率。
[0052]
在完成清洗任务后,控制系统控制光伏清洗车驶离光伏板区域并打开驱动装置驱动刷辊旋转进行自清理,无需水和其他工具,操作方便且节省水资源。
[0053]
另一种实施例中,通信模块为有线通信,在高度检测系统、位置检测系统、驱动装置和控制系统之间连接有线网络。
[0054]
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1