一种深远海渔场无人一体化异构清洗系统
1.本发明属于海洋作业工具领域,更具体地,涉及一种深远海渔场无人一体化异构清洗系统。
背景技术:
2.近年来,在食物供给端面临巨大压力的情况下,以海水养殖业为代表的海洋生物资源利用正迅速崛起,深海网箱养殖近年呈现了跃进式发展的显著特征。无论从产量角度还是面积角度,深海网箱养殖增长速度已在众多海水养殖方式中位列榜首,因此,网箱在实际渔业养殖中的具体应用具有极大的实施前景,构建深远海渔场这一构想因此而提出,这使得渔业养殖区的范围不仅仅局限于内海范围。
3.深远海渔场采用网箱进行海水鱼养殖,在运营过程中网箱会持续接触大量的藻类、贝类或鱼类的排泄物,导致网眼被堵塞降低海水的功率性,使得网箱丧失正常机能,因此对网箱的日常清理维护是必要的,目前网衣清洗方式有定期换网法、人工清洗法、上提下沉法、生物清除法和机械清洗法等,但大部分技术要求人工执行,存在清洗周期长,清洁度低,清洗成本高,效率低等缺点。
4.水下清洗机器人和无人船协同控制系统是促进深海养殖向无人化、智能化转变的重要装备,将在深远海养殖牧场的日常维护中起到举足轻重的作用。在深远海这一特殊背景下,实现网箱清洗要面临以下问题:
5.1.深远海区域环境恶劣,传统清洗方式受到较大限制;
6.2.网箱结构复杂,传统网箱清洗方式效率低下、清洗效果不佳;
7.3.深远海区域通信质量差,对设备自动化、智能化程度要求高;
8.4.深远海区域补给困难,对设备续航能力要求高。
9.当前对网箱清洗技术的研究尚待进一步深入,相关产品也不成熟,特别是无人船和水下机器人协同对深远海渔场进行清洗的相关研究尚处于起步阶段。
技术实现要素:
10.针对现有技术的以上缺陷或改进需求,本发明提供了一种深远海渔场无人一体化异构清洗系统,其目的在于,使用岸基、无人船、水下清洗机器人的三位一体系统进行自主日常维护,适用于深远海渔场的网箱清理,作为一种新型深远海渔场维护系统,可满足智能化管理的日常应用需求。
11.为实现上述目的,本发明提出了一种深远海渔场无人一体化异构清洗系统,包括所述岸基远程监控中心用于规划渔场清洗任务并通过无线通信传递给所述无人船,并对所述无人船和水下清洗机器人进行实时远程监控;
12.所述无人船用于为所述水下清洗机器人提供搭载平台、运动动力、清洗动力,以及根据渔场清洗任务规划水下清洗机器人的作业路径;
13.所述水下清洗机器人与所述无人船通过复合线缆连接,水下清洗机器人用于根据
作业路径对渔场网箱进行清洗。
14.作为进一步优选的,所述无人船包括船体以及设置在船体上的上位控制器、水泵、布放回收装置、机器人停靠平台,其中,所述上位控制器用于根据清洗任务控制水下清洗机器人的清洗路径,所述水泵用于为水下清洗机器人提供清洗动力,所述布放回收装置用于对水下清洗机器人进行布放和回收,所述机器人停靠平台用于在水下清洗机器人回收时,对水下清洗机器人进行搭载和锁紧。
15.作为进一步优选的,所述布放回收装置包括门形吊架、卷扬机和吊缆,所述吊缆一端连接所述水下清洗机器人,另一端通过所述门形吊架上的吊轮,缠绕在所述卷扬机上。
16.作为进一步优选的,所述水下清洗机器人包括机器人本体以及设置在机器人本体上的清洗盘、螺旋桨和下位控制器,其中,所述清洗盘中设置有喷头,该喷头与所述水泵连接,所述清洗盘包括分别设置在所述机器人本体侧面和底面的侧面清洗盘、底面清洗盘;所述螺旋桨用于驱动水下清洗机器人航行;所述下位控制器用于接收所述上位控制器指令,并根据作业路径控制所述螺旋桨和清洗盘。
17.作为进一步优选的,所述机器人本体上安装有水下摄像头,该水下摄像头用于拍摄渔场网箱。
18.作为进一步优选的,所述复合缆线包括充电线缆、通讯线缆、水管和拖缆,其中,所述充电线缆用于为水下清洗机器人供电,所述通讯线缆用于连接所述上位控制器和下位控制器,所述水管用于连接所述喷头和水泵,所述拖缆用于连接所述无人船和水下清洗机器人。
19.作为进一步优选的,所述岸基远程监控中心与所述无人船之间采用冗余通信,该冗余通信包括4g通信、卫星通信和无线电通信。
20.总体而言,通过本发明所构思的以上技术方案与现有技术相比,主要具备以下的技术优点:
21.1.本发明使用岸基、无人船、水下清洗机器人的三位一体系统进行自主日常维护,适用于深远海渔场的网箱清理;具体通过无人船的通信中继作用,以及可与无人船无线通信的岸基,解决了深远海区域通信质量差的问题,同时通过无人船与水下清洗机器人的协同方案,克服了单一清洗装置难以应对深远海区域环境恶劣和补给困难的问题,可满足深远海渔场的智能化管理日常应用需求。
22.2.本发明无人船具有较好的抗风浪能力,保证网箱清洗作业在深远海这一背景下能正常进行,能够应对深远海的恶劣条件以及一些突发状况;同时在无人船上设置有布放回收装置,水下清洗机器人在完成一个网箱的清洗作业后自动挂靠到无人船上,由无人船快速运到下一个作业区域,保证清洗作业的连续性和高效性,也降低了水下清洗机器人遇到意外的风险。
23.3.本发明中无人船与水下清洗机器人作为一个整体,在航行过程中,水下清洗机器人收纳在无人船中,到达作业地点后被放出,整个作业流程中无人船与水下清洗机器人进行协同,二者之间通过复合缆线进行连接,通过通讯线缆进行短程通信,而无人船与岸基之间通过电磁波进行远程无线通信,通过有线、无线相结合的方式解决了水下清洗机器人与岸基的通信问题,使岸基能够对网箱清理作业进行实时监控。
24.4.本发明水下清洗机器人底面和侧面均安装有清洗盘,其中设置有高压水喷头,
在机器人下位控制系统控制下可以同时对侧面和底面进行清洗,提高了清洗效率。
25.5.本发明水面无人船与岸站之间采用冗余通信方案,所述冗余通信方案包含4g通信、卫星通信、无线电通信等多种通信方式,保证无人船与岸站之间实时可靠的数据传输。
附图说明
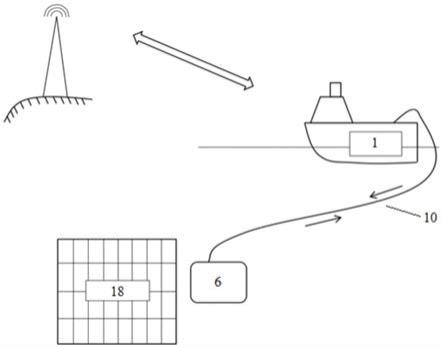
26.图1为本发明实施例深远海渔场无人一体化异构清洗系统工作原理示意图;
27.图2为本发明实施例深远海渔场无人一体化异构清洗系统架构示意图;
28.图3为本发明实施例水下清洗机器人结构示意图;
29.图4为本发明实施例无人船结构示意图。
30.在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:1
‑
无人船,2
‑
门形吊架,3
‑
桅杆,4
‑
水泵,5
‑
卷扬机,6
‑
水下清洗机器人,7
‑
左推进器,8
‑
右推进器,9
‑
吊缆,10
‑
复合线缆,11
‑
液压站,12
‑
行走轮,13
‑
侧面清洗盘,14
‑
底面清洗盘,15
‑
推进器,16
‑
水下摄像头,17
‑
复合线缆接头,18
‑
渔场网箱。
具体实施方式
31.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
32.本发明实施例提供的一种深远海渔场无人一体化异构清洗系统,如图1和图2所示,包括岸基远程监控中心、无人船1和水下清洗机器人6,其中:
33.所述岸基远程监控中心用于规划和分配渔场清洗任务,并通过无线通信传递给所述无人船,并对所述无人船和水下清洗机器人进行实时远程监控,同时兼具对无人船自主控制的差错纠正及应急处理功能;
34.所述无人船1用于为所述水下清洗机器人提供搭载平台、运动动力、清洗动力,以及根据渔场清洗任务规划水下清洗机器人的作业路径(包括运动路径以及清洗作业方式),接收机器人的状态反馈,对水下清洗机器人发送控制命令,对水下清洗机器人的运动进行智能控制;
35.所述水下清洗机器人6与所述无人船1通过复合线缆10连接,用于执行水下清洗作业任务,水下清洗机器人接收和执行无人船的控制命令,水下清洗机器人根据无人船规划的作业路径对渔场网箱18进行清洗,并反馈作业状态,以完成对渔场网箱的高效清洗任务。
36.进一步的,如图4所示,所述无人船包括船体以及设置在船体上的上位控制器、动力装置、布放回收装置、机器人停靠平台和定位和导航装置,其中:所述上位控制器用于根据清洗任务控制水下清洗机器人的清洗路径,其具有自主决策和自动控制功能,包括清洗效果评判、作业路径更新和优化选择、任务分析与规划、船体自适应性调整等,可实现对无人船的路径决策、运动控制、对船上设备及水下清洗机器人发布控制命令,可以确保在通信状况较差甚至无法与岸基进行通信时能够自主完成任务;具体通过传感器群组采集系统状态信息,应用上位控制器内置算法,判断系统状态并进行相应地自动调整。所述动力装置包括电机和水泵4,电机用于为水下清洗机器人提供运动动力,水泵4用于为水下清洗机器人
提供高压冲洗水源动力;所述布放回收装置用于对水下清洗机器人进行布放和回收;所述机器人停靠平台用于在水下清洗机器人回收时,对水下清洗机器人进行搭载和锁紧;定位和导航装置用于确定无人船位置,并根据位置和任务需求进行导航。此外,无人船上还安装有常规的桅杆3,以及左推进器7和右推进器8。
37.更进一步的,所述布放回收装置包括门形吊架2、卷扬机5、吊缆9和液压站11,其中,所述卷扬机5通过电机带动;所述吊缆9一端连接所述水下清洗机器人,另一端通过所述门形吊架2上的吊轮,缠绕在所述卷扬机5上;液压站11用于为门形吊架2提供液压动力。水下清洗机器人下水时,门型吊架2将水下清洗机器人由机器人停靠平台吊至水面上方,卷扬机5释放吊缆9,缓慢放下水下清洗机器人,然后吊缆9与水下清洗机器人,水下清洗机器人对网箱进行清洗;水下清洗机器人作业完成后,自动游回水面,卷扬机5转动使卷扬筒收缆,由门形吊架2通过吊缆9把水下清洗机器人垂直吊起,然后控制门形吊架2和卷扬机5,使水下清洗机器人停放在机器人停靠平台上。
38.进一步的,如图3所示,所述水下清洗机器人包括机器人本体以及设置在机器人本体上的清洗盘、螺旋桨15和下位控制器,其中:所述清洗盘中设置有喷头,该喷头通过高压水管接到水面无人船的水泵上,在下位控制器的控制下喷出高压水进行清洗作业;所述清洗盘包括分别设置在所述机器人本体侧面和底面的侧面清洗盘13、底面清洗盘14,分别清洗网箱侧壁和底部;所述螺旋桨15用于驱动水下清洗机器人航行,且机器人本体上两侧还设置有行走轮12,工作时,螺旋桨15和行走轮12吸附在网箱上驱动水下清洗机器人运动;所述下位控制器用于接收所述上位控制器指令,并根据作业路径控制所述螺旋桨15和清洗盘;所述机器人本体上安装有水下摄像头16,该水下摄像头16用于拍摄渔场网箱并传送给无人船,以评判清洗效果。
39.进一步的,水下清洗机器人上设有复合线缆接头17,用于接入与无人船连接的复合线缆10,该复合缆线10包括充电线缆、通讯线缆、水管和拖缆,保证无人船对水下清洗机器人清洗作业的异构协同控制功能及动力补给功能;具体的,复合线缆10一端连接水下清洗机器人,另一端缠绕在卷扬机5上;所述充电线缆用于为水下清洗机器人供电,解决了单台机器人续航能力受限的问题;所述通讯线缆用于连接所述上位控制器和下位控制器,所述水管用于连接所述喷头和水泵,所述拖缆用于连接所述无人船和水下清洗机器人。
40.进一步的,所述岸基远程监控中心与所述无人船之间采用冗余通信,该冗余通信包括4g通信、卫星通信和无线电通信;具体的,水面无人船船载有通信系统,其是整个无人清洗系统的通信中继站,其采用无线电通信、卫星通信、4g网络与岸基远程监控中心通信,采用局域网在无人船内部通信;无人船与水下清洗机器人间通过通信线缆(如以太网)进行通讯。
41.上述深远海渔场无人一体化异构清洗系统的工作过程如下:
42.首先,无人船与水下清洗机器人作为一个整体,在航行过程中,水下清洗机器人收纳在无人船中,到达作业地点后被放出,整个作业流程中无人船与水下清洗机器人进行协同,二者之间通过复合缆线进行连接,通过通讯线缆进行短程通信,而无人船与岸基之间通过电磁波进行远程无线通信,通过有线、无线相结合的方式解决了水下清洗机器人与岸基的通信问题,使岸基能够对网箱清理作业进行实时监控。此外可利用携带的传感器监测无人船的燃料状况,并通过算法绘制燃料的消耗曲线图,分析其使用趋势,判断燃料不足或整
个任务完成后,无人船携带水下清洗机器人自动返航。
43.其次,在到达作业地点后,无人船通过声纳等设备探测水下地形和网箱分布情况,并结合给定工作点进行分析,从而对水下清洗机器人规划出合理的作业路径,之后水下清洗机器人会根据给出的指令进行移动和清洗作业。水下清洗机器人在完成一个网箱的清洗作业后自动挂靠到无人船上,由无人船快速运到下一个作业区域,保证清洗作业的连续性和高效性,也降低了水下清洗机器人遇到意外的风险。
44.最后,由于深远海渔场的网箱体积庞大、形状复杂、清洗过程难度大,当水下清洗机器人无法独立完成清洗作业时,可通过无人船对水下清洗机器人进行清洗控制,两者的协同可以将水下清洗机器人的部分设备转移到无人船上,使水下清洗机器人的功能专一化。特别地,当无人船遭遇紧急突发情况时,岸基远程监控中心可对其进行直接控制,保证清洗任务的有效完成。
45.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1