基于激光窨井水位及加速度井盖位移的传感器组件的制作方法
[0001]
本实用新型涉及井盖的领域,具体是指一种基于激光窨井水位及加速度井盖位移的传感器组件。
背景技术:
[0002]
井盖是封闭下水管道开设于路面的开口的盖子,目前现有的井盖中设置传感器元件通常具有激光测距传感器来进行窨井水位的测量,但是在使用过程中,容易有水滴等附着在激光测距传感器上从而导致测量数值不准确,最终导致窨井内的水位暴涨时,传感器组件无法正确进行报警。
技术实现要素:
[0003]
本实用新型的目的在于克服上述现有技术中的不足,提供一种基于激光窨井水位及加速度井盖位移的传感器组件。
[0004]
为了解决上述技术问题,本实用新型提供了基于激光窨井水位及加速度井盖位移的传感器组件,包括:
[0005]
壳体;
[0006]
震动装置,设置在所述壳体内,所述震动装置包括震动马达、偏心轮、供电模块、红外激光测距模块和控制器,所述红外激光测距模块用于检测窨井水位,所述震动马达与所述偏心轮传动连接;
[0007]
所述红外激光测距模块、供电模块和震动马达与所述控制器电连接,所述控制器用于控制所述震动马达转动并震落附着在所述红外激光测距模块上的水滴。
[0008]
优选的,所述红外激光测距模块包括红外补光灯和激光测距传感器。
[0009]
优选的,还包括与所述控制器电连接的mems加速度传感器,所述mems加速度传感器用于检测壳体的位移。
[0010]
优选的,所述供电模块是电池。
[0011]
优选的,所述震动马达的驱动轴与所述偏心轮偏心固接,所述驱动轴转动带动所述偏心轮转动并致使所述壳体震动。
[0012]
优选的,所述壳体还包括上壳体和下壳体,所述上壳体盖设在所述下壳体上并界定处容纳空间,所述震动装置设置在所述容纳空间内。
[0013]
优选的,所述红外激光测距模块设置在所述下壳体上并竖直朝下进行检测。
[0014]
相较于现有技术,本实用新型的技术方案具备以下有益效果:
[0015]
本实用新型为传感器组件自动震落附着在红外激光测距模块的水滴提供硬件支持,当控制器读取的红外激光测距模块测量的距离数值小于预设值时,则判断红外激光测距模块上附着有水滴,所述控制器控制所述震动马达转动并带动所述偏心轮转动,所述壳体震动并使得附着在红外激光测距模块上的水滴震落。
附图说明
[0016]
图1为本实用新型优选实施例中传感器组件的立体示意图;
[0017]
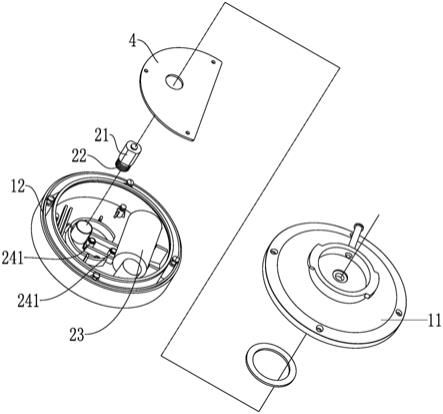
图2为本实用新型优选实施例中传感器组件的立体分解示意图;
[0018]
图3为本实用新型优选实施例中传感器组件的剖面示意图;
[0019]
图4为本实用新型优选实施例中震动装置的电路原理示意图。
具体实施方式
[0020]
下文结合附图和具体实施方式对本实用新型做进一步说明。
[0021]
在下文中被用于描述附图的某些方向性术语,例如“内”、“外”、“上方”、“下方”和其它方向性术语,将被理解为具有其正常含义并且指正常看附图时所涉及的那些方向。除另有指明,本说明书所述方向性术语基本按照本领域技术人员所理解的常规方向。
[0022]
本实用新型中所使用的术语“第一”、“第一个”、“第二”、“第二个”及其类似术语,在本实用新型中并不表示任何顺序、数量或重要性,而是用于将一个部件与其它部件进行区分。
[0023]
参阅图1-4,基于激光窨井水位及加速度井盖位移的传感器组件100,包括壳体1和设置在所述壳体1内的震动装置。
[0024]
所述震动装置包括震动马达21、偏心轮22、供电模块23、红外激光测距模块24和控制器25,所述红外激光测距模块24用于检测窨井水位,所述震动马达21与所述偏心轮22传动连接;所述红外激光测距模块24、供电模块23 和震动马达21与所述控制器25电连接,所述控制器25用于控制所述震动马达21转动。
[0025]
当所述控制器25感受到所述红外激光测距模块24测量的数值小于预设值时控制所述震动马达21转动,具体的,该预设值为50厘米,所述红外激光测距模块24包括红外补光灯241和激光测距传感器242,所述红外补光灯241用于对窨井内的黑暗环境进行补光和消除一部分环境光线不足的干扰。
[0026]
所述传感器组件100还包括与所述控制器25电连接的mems加速度传感器 3,所述mems加速度传感器3用于检测壳体1的位移,mems传感器即微机电系统,它具有体积小、重量轻、成本低、功耗低、可靠性高、适于批量化生产、易于集成和实现智能化的特点,因为体积小,利于与所述传感器组件100的集成。
[0027]
在本实施例中,所述供电模块23是电池,在一些简单替换中,所述供电模块23也可以是外界供电,并不以此为限。
[0028]
所述震动马达21的驱动轴与所述偏心轮22偏心固接,所述驱动轴转动带动所述偏心轮22转动并致使所述壳体1震动,所述偏心轮22为半圆形,所述震动马达21的驱动轴与所述偏心轮22的圆心连接。
[0029]
所述壳体1还包括上壳体11和下壳体12,所述上壳体11盖设在所述下壳体12上并界定处容纳空间,所述震动装置设置在所述容纳空间内,所述传感器组件100还包括设置在所述容纳空间内的电路板4,所述控制器25和mems 加速度传感器3设置在所述电路板4上,所述红外激光测距模块24设置在所述下壳体12上并竖直朝下进行检测。
[0030]
以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的设计构思并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,利用此构思
对本实用新型进行非实质性的改动,均属于侵犯本实用新型保护范围的行为。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1