太阳能板、定日镜清洁机器人作业环境清洁结构的制作方法
1.本实用新型涉及机器人技术领域,具体地,涉及一种太阳能板、定日镜清洁机器人作业环境清洁结构。
背景技术:
2.近年来,太阳能发电技术大规模发展,其中太阳能板材用于发电被广泛的安装在绿色建筑、光伏电站和建筑物顶等多种环境,太阳能作为一种清洁的可再生能源得到越来越多的应用,同时,绝大多数的安装环境都是露天安装,由于空气中的沉降等原因太阳能板材表面经常会有积尘,积尘使太阳能板材对太阳光的吸收,进而影响太阳能板材的效率,及时清洁太阳能板材表面的积尘,有利于提高太阳能板材的发电效率。
3.同时,光热发电技术是继光伏发电技术以后的新兴太阳能利用技术,光热发电技术包括塔式太阳能热发电技术、槽式太阳能热发电技术、碟式太阳能热发电技术、线性菲涅尔式太阳能热发电技术。其中,塔式太阳能热发电是采用大量的定日镜将太阳光聚集到吸热塔顶的吸热器上,加热工质,产生蒸汽,推动汽轮机带动发电机发电。定日镜实现的功能是将太阳光聚集到吸热器上,而定日镜镜面的清洁度将会影响镜面的反射率,进而影响吸热器的入射能量,因此,定日镜镜面保持较高的清洁度,将提高光热转换效率,所以,要定期对定日镜进行清洁。
4.随着科技的进步,鉴于运用越来越广泛的太阳能板以及对于镜场中数以万计的定日镜来说,人工清洁的方式已经不能满足需求,太阳能板以及定日镜的清洁逐渐由机器人代替,通过机器人作业的方式来清洁太阳能板材和定日镜可以大大提高作业效率,降低人工劳动强度,但机器人在作业的过程中往往由于作业环境中的各种凸起或坑道影响作业效率和作业的精度,甚至不能很好的完成清洁作业。
5.专利文献cn205725619u公开的一种光伏板清洁机器人,包括行走装置、车架和清洁辊等,该机器人可以对排列整齐的光伏板材进行自动化清洁,但该设计仍然不能解决凹凸不平的作业环境对机器人运动中的影响。
技术实现要素:
6.针对现有技术中的缺陷,本实用新型的目的是提供一种太阳能板、定日镜清洁机器人作业环境清洁结构。
7.根据本实用新型提供的一种太阳能板、定日镜清洁机器人作业环境清洁结构,包括:
8.驱动单元,能够驱使机器人运动;
9.检测单元,安装在所述机器人上;
10.执行单元,安装在所述机器人上,能够实现凸起沙石的去除以及凹坑的填平;
11.处理单元,分别与驱动单元、检测单元、执行单元信号连接。
12.优选地,所述检测单元包括沙石检测雷达、超声波传感器以及距离传感器;
13.所述沙石检测雷达、超声波传感器、距离传感器分别与所述处理单元信号连接。
14.优选地,所述执行单元包括沙石回收机构、传送机构以及填平机构;
15.所述沙石回收机构、传送机构、填平机构分别与所述处理单元信号连接。
16.优选地,所述沙石回收机构包括第一沙石回收电机、第二沙石回收电机、沙石回收扫板以及沙石回收铲轮;
17.所述第一沙石回收电机能够驱使沙石回收扫板转动实现沙石回收并能够将回收的沙石输送至所述沙石回收铲轮,所述第二沙石回收电机能够驱使沙石回收铲轮转动并将所述沙石输送至所述传送机构。
18.优选地,所述传送机构包括前传送带、后传送带、左传送带以及右传送带;
19.所述前传送带、后传送带的一端分别连接所述沙石回收铲轮,所述前传送带、后传送带的另一端分别与左传送带、右传送带连接。
20.优选地,所述传送机构还包括推板电机以及一块或多块推板;
21.所述推板电机能够驱使所述推板沿左传送带和/或右传送带的表面运动进而推动储存在所述左传送带、右传送带上的沙石。
22.优选地,所述传送机构中的传送带采用滚筒电机驱动,所述滚筒电机与所述处理单元信号连接。
23.优选地,所述填平机构包括刮板以及刮板电机;
24.所述刮板电机能够驱使所述刮板运动进而能够将填充到凹坑中的沙石进行刮平作业。
25.优选地,所述机器人的底部设置有转轮,所述驱动单元与所述转轮驱动连接,所述驱动单元能够驱使所述转轮转向。
26.优选地,所述转轮沿周向设置有耐磨橡胶以及防滑纹。
27.与现有技术相比,本实用新型具有如下的有益效果:
28.1、本实用新型通过各个单元的配合将机器人作业环境中的沙石凸起或凹坑采取不同的机械处理方式,能够消除机器人运动过程中由于运动环境中的凹凸不平带来的作业效率低、作业精度差的缺陷,大大提高了机器人的作业效率。
29.2、本实用新型中通过设置多个传送带实现沙石的储存和运输,并能够沿周向灵活布置,形成不同方位的沙石输入和输出的布置,大大提高了设备的实用性。
30.3、本实用新型通过进一步的改进,有助于实现对机器人前方体积较大的凹坑或凸起能够灵活避开,大大提高了设备的实用性和灵活性。
附图说明
31.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
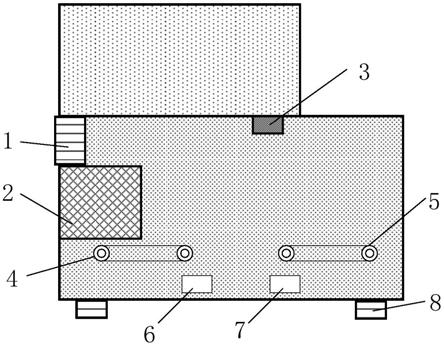
32.图1为本实用新型的结构示意图。
33.图2为本实用新型工作原理示意图。
34.驱动单元 1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
后传送带 5
35.检测单元 2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
左传送带 6
36.处理单元 3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
右传送带 7
37.前传送带 4
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
转轮 8
具体实施方式
38.下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。这些都属于本实用新型的保护范围。
39.本实用新型提供了一种太阳能板、定日镜清洁机器人作业环境清洁结构,包括驱动单元1、检测单元2、执行单元以及处理单元3,所述驱动单元1,能够驱使机器人运动并能够驱使机器人运动到达预设位置,所述检测单元2安装在所述机器人上,用于检测地面环境并检测异常,对所述异常形成环境模型信息和位置信息,所述异常包括凸起信息以及凹坑信息,所述环境模型信息包括凸起模型信息以及凹坑模型信息,其中当获得凸起信息时,即机器人向预设位置运动时,前方出现沙石凸起,所述执行单元安装在所述机器人上,所述执行单元进行回收操作,执行单元通过自身所具有的沙石回收扫板将凸起部位去除并将去除的沙石进行收集,所述处理单元3分别与驱动单元1、检测单元2、执行单元信号连接。
40.进一步地,当获得凹坑信息时,即机器人向预设位置运动时,前方出现沙石凹坑,所述执行单元进行输出操作,执行单元将自身所具有的传送带上储存的沙石填充到凹坑中并通过沙石刮平电机带动刮板将填充到凹坑中的沙石刮平。所述处理单元3包括处理器,机器人上还设置有速度检测仪,用于接收所述环境模型信息和位置信息并根据机器人的运动速度输出第一控制命令,其中,执行单元执行所述第一控制命令。
41.具体地,所述检测单元2包括沙石检测雷达、超声波传感器以及距离传感器,所述沙石检测雷达、超声波传感器、距离传感器分别与所述处理单元3信号连接,通过沙石检测雷达、超声波传感器、距离传感器能够检测到前方的凸起或凹坑的形状和距离信息,进而处理单元3控制执行单元动作。所述沙石检测雷达用于获取异常信息,所述超声波传感器以及距离传感器用于获取所述异常信息所在的位置。
42.需要说明的是,本实用新型中的信号连接既可以采用有线的连接方式,又可以采用无线的连接方式,具体应根据实际的应用场景灵活选择,以满足实际的需求。
43.具体地,所述执行单元包括沙石回收机构、传送机构以及填平机构,所述沙石回收机构、传送机构、填平机构分别与所述处理单元3信号连接,所述沙石回收机构包括第一沙石回收电机、第二沙石回收电机、沙石回收扫板以及沙石回收铲轮,所述第一沙石回收电机能够驱使沙石回收扫板转动实现沙石回收并能够将回收的沙石输送至所述沙石回收铲轮,所述第二沙石回收电机能够驱使沙石回收铲轮转动并将所述沙石输送至所述传送机构。
44.具体地,如图1所示,所述传送机构包括前传送带4、后传送带5、左传送带6以及右传送带7,所述前传送带4、后传送带5的一端分别连接所述沙石回收铲轮,所述前传送带4、后传送带5的另一端分别与左传送带6、右传送带7连接,左传送带6、右传送带7用于储存沙石,当左传送带6、右传送带7上的沙石到达一定重量时,处理单元3将根据获得的信息能够控制在前传送带4、后传送带5放置部分沙石,以增加总体的储存量。
45.具体地,所述传送机构还包括推板电机以及一块或多块推板,所述推板电机能够驱使所述推板沿左传送带6和/或右传送带7的表面运动进而推动储存在所述左传送带6、右
传送带7上的沙石。
46.具体地,所述传送机构中的传送带优选采用滚筒电机驱动,所述滚筒电机与所述处理单元3信号连接,处理单元3根据需要能够控制滚筒电机运动。
47.具体地,所述填平机构包括刮板以及刮板电机,所述刮板电机能够驱使所述刮板运动进而能够将填充到凹坑中的沙石进行刮平作业。
48.具体地,所述机器人的底部设置有转轮8,所述驱动单元1与所述转轮8驱动连接,所述驱动单元1能够驱使所述转轮8转向,本实用新型中的转轮8可以采用专利文献cn107600149a(一种具有转向功能及调速功能的轮子)公开的轮子,该轮子具有转向功能,同时兼具调速功能,在一个优选例中,所述转轮8沿周向设置有耐磨橡胶以及防滑纹,能够提高防滑以及耐磨的能力,延长使用寿命,增加运动过程中的稳定性。
49.需要指出的是,当所述处理单元3获得的环境模型信息超过预设阈值时,即内部存储的沙石不足以填充检测到的凹坑或者检测到的凸起沙石回收后已经超过了执行单元的内部存储空间,此时所述处理单元3输出第二控制命令,所述驱动单元1执行第二控制命令,即处理单元3将控制驱动单元1绕开检测到的异常,即绕道而行,同时本实用新型中还设置有控制中心,当所述处理单元3获得的环境模型信息超过预设阈值时,所述处理单元3将环境模型信息输送给控制中心,控制中心将接收到的异常信息以屏幕报警的形式或通过单独设计的报警器通知负责人员,负责人员再根据现场的监控画面进行定位选择人工到现场处理,以优化现场的作业环境,保证机器人的作业效率,其中,所述预设阈值的设定根据所述执行单元上沙石的最大承载量进行设定,例如执行单元上沙石的最大承载量为0.25m3,可将预设阈值设置为0.22m3,同时,处理单元3在获得环境模型信息后也通过设定的程序将内部已经储存的沙石考虑在内,以保证设备的正常运行。
50.本实用新型的工作原理如下:
51.在驱动单元1的驱使下带动清洗机器人前往预设位置的过程中,驱动单元1上检测单元2检测前方地面状态,包括沙石凸起、凹坑等。当检测到沙石凸起时,沙石检测雷达扫描沙石凸起外形并获得沙石凸起外形和体积,超声波传感器、距离传感器检测沙石凸起或凹坑的位置,将信号传输至处理器,处理器根据驱动单元1的前进速度,启动第一沙石回收电机和第二沙石回收电机,第一沙石回收电机带动沙石回收扫板旋转,将凸起的沙石推入沙石回收铲轮,第二沙石回收电机带动沙石回收铲轮旋转,将回收的沙石倒入沙石前传送带4、后传送带5,通过沙石前传送带4、后传送带5传送至沙石左传送带6、右传送带7,储存沙石。当沙石检测雷达、超声波传感器、距离传感器检测到沙石凹坑时,雷达扫描沙石凹坑形状并确认填平需要的沙石体积,超声波传感器、距离传感器检测沙石位置,将信号传输至处理器,处理器根据驱动单元1的前进速度,启动沙石左传送带6、右传送带7,将储存的沙石传送至凹坑所在位置,根据凹坑的体积输出匹配的沙石体积,用一块或多块推板将储存的沙石推向凹坑,启动沙石刮平电机,沙石刮平电机带动刮板旋转至推出的沙石后,驱动单元1前进,用刮板将推出的沙石刮平,沙石刮平电机反向旋转,带动刮板回位。当检测雷达、超声波传感器、距离传感器检测到沙石凸起或凹坑大于清洗机器人可以回收或填平的范围,驱动单元1驱使清洗机器人绕开此凸起或凹坑,同时清洗机器人通过无线数据传输至控制中心。
52.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖
直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
53.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本实用新型的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1