一种用于立式大型长圆筒内壁涂层清除的激光扫描装置的制作方法
1.本发明属于激光清除技术领域,具体涉及的是一种用于立式大型固定长圆筒内壁涂层清除的一种通过往复升降、定角脉动旋转实现激光全覆盖扫描的机械传动装置。
背景技术:
2.激光表面清除技术是近年来快速发展的新型技术,大功率激光清除设备需要同时具备激光传输、电力传输、设备运动控制、信号与反馈、吹气、冷却等多种功能,需要多种类相应的配套设备。当工件需要采用自动清除模式时,常规方案是将小型可拆卸回转工件放置于机床上,激光枪仅做直线运动,配合回转工件完成表面清除,但该常规方案不能用于完成立式大型固定长圆筒内壁涂层的自动清除。
技术实现要素:
3.本发明要解决的技术问题是将小型可拆卸回转工件放置于机床上,激光枪仅做直线运动,配合回转工件完成表面清除,不能用于完成立式大型固定长圆筒内壁涂层的自动清除,为解决上述问题,本发明提供一种用于立式大型长圆筒内壁涂层清除的激光扫描装置。
4.本发明的目的是以下述方式实现的:一种用于立式大型长圆筒内壁涂层清除的激光扫描装置,包括主轴组件,所述主轴组件顶部连接顶部定位驱动组件,主轴组件底部连接底部定位支撑组件,主轴组件靠近顶部定位驱动组件一端连接平台升降驱动电机,平台升降驱动电机输出端连接主动轮,主轴组件靠近顶部定位驱动组件一端连接主动轮,主轴组件靠近底部定位支撑组件一端连接从动轮,主动轮与从动轮之间通过链条,链条上设置载物平台,载物平台上设置激光清除设备。
5.所述顶部定位驱动组件,包括主轴驱动机构和支撑架,所述主轴组件顶部连接支撑架,支撑架顶部设置主轴驱动机构,主轴驱动机构输出端与主轴组件连接。
6.所述底部定位支撑组件,包括定位支架和轴承机构,主轴组件底部连接轴承机构,轴承机构底部连接定位支架。
7.所述载物平台包括支撑平台、导向架、导向轮组、滑轨和设备安装平台,所述链条连接导向轮组,导向轮组设置连接导向架,导向架连接支撑平台,支撑平台上设置滑轨,滑轨连接设备安装平台,设备安装平台上设置激光清除设备。
8.相对于现有技术,本发明部顶部定位驱动组件为主轴组件上端提供约束及定位,同时为主轴组件旋转提供动力,使主轴组件在一定角度范围(一般设定最大范围为
±
180
°
)定角脉动旋转,定角脉动旋转是指当装载激光扫描设备的载物平台上升至长圆筒顶端或下降至长圆筒底端后立即按设定程序旋转一定的角度的动作,主轴组件主要为载物平台提供升降动力以及导向,其上端固定于顶部定位驱动组件的驱动轴上,下端插入底部定位支撑组件中心孔内,主轴组件上部嵌入平台升降驱动机构,为载物平台的升降提供动力,载物平台为激光清除设备提供安装基座,安装于主轴上,同时与主轴组件中的升降驱动机构通过
可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
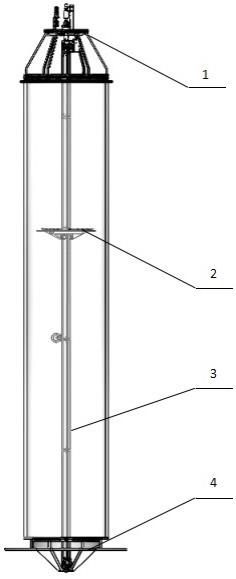
22.实施例1:如附图1
‑
5所示,一种用于立式大型长圆筒内壁涂层清除的激光扫描装置,包括主轴组件3,所述主轴组件3顶部连接顶部定位驱动组件1,主轴组件3底部连接底部定位支撑组件4,主轴组件3靠近顶部定位驱动组件1一端连接平台升降驱动电机33,平台升降驱动电机33输出端连接主动轮34,主轴组件3靠近顶部定位驱动组件1一端连接主动轮34,主轴组件3靠近底部定位支撑组件4一端连接从动轮31,主动轮34与从动轮31之间通过链条32,链条32上设置载物平台2,载物平台2上设置激光清除设备,激光清洗技术是指利用高能激光束照射到待清洗工件表面,使待清洗工件表面的污物、锈斑或涂层发生瞬间蒸发或剥离,从而达到洁净的工艺过程,激光烧蚀(激光清洗学名)或光烧蚀是通过用激光束照射从固体(或有时为液体)表面去除材料的过程。 在低激光通量下,材料被吸收的激光能量加热并蒸发或升华。 在高激光通量下,材料通常会转换为等离子体。通常,激光烧蚀是指用脉冲激光去除材料,但是如果激光强度足够高,则可以用连续波激光束烧蚀材料。 深紫外光的准分子激光器主要用于光烧蚀,用于光烧蚀的激光波长约为200 nm。吸收激光能量的深度以及单个激光脉冲去除的材料量取决于材料的光学特性以及激光波长和脉冲长度。 每个激光脉冲从靶标烧蚀的总质量通常称为烧蚀率, 激光束扫描速度和扫描线覆盖率等激光辐射特征会显着影响烧蚀过程。与机械摩擦清洗、化学腐蚀清洗、液体固体强力冲击清洗、高频超声清洗等传统清洗方法相比,激光清洗具有明显的优点:激光清洗是一种”绿色”的清洗方法,不需使用任何化学药剂和清洗液,清洗下来的废料基本上都是固体粉末,体积小,易于存放,可回收,可以轻易解决化学清洗带来的环境污染问题;传统的清洗方法往往是接触式清洗,对清洗物体表面有机械作用力,损伤物体的表面或者清洗的介质附着于被清洗物体的表面,无法去除,产生二次污染,激光清洗的无研磨和非接触性使这些问题迎刃而解;激光可以通过光纤传输,与机器手和机器人相配合,方便地实现远距离操作,能清洗传统方法不易达到的部位,这在一些危险的场所使用可以确保人员的安全;激光清洗能够清除各种材料表面的各种类型的污染物,达到常规清洗无法达到的清洁度。而且还可以在不损伤材料表面的情况下有选择性地清洗材料表面的污染物;激光清洗效率高,节省时间;平台升降驱动电机33为载物平台2提供轴向升降运动的动力及导向。激光清洗方法主要有四种:
①
激光干洗法,即采用脉冲激光直接辐射去污;
②
激光+液膜方法,即首先沉积一层液膜于基体表面,然后用激光辐射去污;
③
激光+惰性气体的方法,即在激光辐射的同时,用惰性气体吹向基体表面,当污物从表面剥离后会立即被气体吹离表面,以避免表面再次污染和氧化;
④
运用激光使污垢松散后,再用非腐蚀性化学方法清洗。主轴组件3上端固定于顶部定位驱动组件1的驱动轴上,下端插入底部定位支撑组件4到轴承机构42内,实现主轴的径向约束,以保证主轴组件3进行旋转运动时,其轴心与筒壁轴心始终重合。
23.所述顶部定位驱动组件1,包括主轴驱动机构11和支撑架12,所述主轴组件3顶部连接支撑架12,支撑架12顶部设置主轴驱动机构11,主轴驱动机构11输出端与主轴组件3连
接,为主轴组件3提供旋转动力以及主轴上部定位。支撑架12下端面开有销孔,可利用筒口结构上的定位销进行周向定位,并通过匹配结构在筒口锁紧;上端面为顶部定位驱动组件1提供安装面并起到支撑作用,主轴驱动机构11主要由驱动电机、减速器及安装基座等组成,可为设备主轴组件3旋转提供动力。
24.所述底部定位支撑组件4,包括定位支架41和轴承机构42,主轴组件3底部连接轴承机构42,轴承机构42底部连接定位支架41,底部定位支撑组件4为主轴组件3提供约束及定位,并配合主轴旋转。定位支架41上有两个v型定位销,分别与筒底结构件上的两个v型定位槽配合,起到径向和轴向约束底部定位支撑组件4的作用。定位支架41环内部留有螺孔,待底部定位支撑组件4安装到位时将螺纹孔内的螺钉外伸至筒底结构件上,起到径向约束底部定位支撑组件的作用。
25.所述载物平台2包括支撑平台21、导向架22、导向轮组23、滑轨24和设备安装平台25,所述链条32连接导向轮组23,导向轮组设置23连接导向架22,导向架22连接支撑平台21,载物平台2由筒口向下运行至筒底位置时,根据设定程序,主轴驱动机构11驱动主轴带动载物平台2沿设定方向旋转一定角度(该角度可根据激光枪扫描宽度设置),载物平台2在平台升降驱动电机33作用下向上运动至筒口,周而复始,完成筒内壁一半面积涂层的清除;在总角度旋转180
°
后,根据设定程序,主轴驱动机构11驱动主轴带动载物平台2水平反向旋转至初始位置,再按设定程序完成另一半筒内壁涂层的清除,支撑平台21上设置滑轨24,滑轨24连接设备安装平台25,设备安装平台25上设置激光清除设备,载物平台2上的导向轮组23与链条32连接,主动轮34安装于主轴组件3上端,从动轮31安装于主轴组件3下端,平台升降驱动电机33与主动轮34连接,平台升降驱动电机33通过驱动主动轮34,带动整个链条上下运动,从而带动固定于链条32上的载物平台2沿主轴组件3升降,链传动是通过链条将具有特殊齿形的主动链轮的运动和动力传递到具有特殊齿形的从动链轮的一种传动方式。链传动有许多优点,与带传动相比,无弹性滑动和打滑现象,平均传动比准确,工作可靠,效率高;传递功率大,过载能力强,相同工况下的传动尺寸小;所需张紧力小,作用于轴上的压力小;能在高温、潮湿、多尘、有污染等恶劣环境中工作。与带传动相比,链传动没有弹性滑动和打滑,能保持准确的平均传动比;需要的张紧力小,作用于轴的压力也小,可减少轴承的摩擦损失;结构紧凑;能在温度较高、有油污等恶劣环境条件下工作。与齿轮传动相比,链传动的制造和安装精度要求较低;中心距较大时其传动结构简单。瞬时链速和瞬时传动比不是常数,因此传动平稳性较差,工作中有一定的冲击和噪声。链传动平均传动比准确,传动效率高,轴间距离适应范围较大,能在温度较高、湿度较大的环境中使用;但链传动一般只能用作平行轴间传动,且其瞬时传动比波动,传动噪声较大。 由于链节是刚性的,因而存在多边形效应(即运动不均匀性),这种运动特性使链传动的瞬时传动比变化并引起附加动载荷和振动。载物平台2的升降运行时,均匀布置在导向架四周的滚轮组紧贴主轴组件3外壁滚动,减少主轴组件3外壁与导向架之间的摩擦力。
26.本发明的工作过程如下:启动载物平台2上设置的激光清除设备,平台升降驱动电机33和主轴驱动机构11同时通电,主轴组件3上端与主轴驱动机构11的驱动轴连接,主轴驱动机构11带动安装于载物平台2上的激光清除设备绕主轴组件3轴心做旋转运动,同时平台升降驱动电机33通过驱动主动轮34,带动整个链条上下运动,从而带动固定于链条32上的载物平台2沿主轴组件3升降,当载物平台2由筒口向下运行至筒底位置时,根据设定程序,
主轴驱动机构11驱动主轴带动载物平台2沿设定方向旋转一定角度(该角度可根据激光枪扫描宽度设置),之后,载物平台2在平台升降驱动电机33作用下向上运动至筒口,周而复始,完成筒内壁一半面积涂层的清除;在总角度旋转180
°
后,根据设定程序,主轴驱动机构11驱动主轴带动载物平台2水平反向旋转至初始位置,再按设定程序完成另一半筒内壁涂层的清除,若搭载两支激光枪沿中心对称布置,则载物平台2累积总角度旋转180
°
即可完成对全筒内壁涂层的清除。
27.以上所述的仅是本发明的优选实施方式,应当指出,对于本领域的技术人员来说,在不脱离本发明整体构思前提下,还可以作出若干改变和改进,这些也应该视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1