激光清洗方法及清洗装置与流程
1.本发明属于激光清洗技术领域,特别是涉及一种激光清洗方法及清洗装置。
背景技术:
2.随着激光技术的不断发展,激光清洗技术也得到了快速发展。并且,激光清洗技术具有无研磨、非接触、无热效应和适用性强等优点,激光清洗技术被认为是最可靠、最有效的清洗方法,其应用也越来越广泛。但是,现有技术中的激光清洗装置存在着清洗不干净,自动化程度低等问题。
技术实现要素:
3.本发明解决了现有技术中激光清洗装置存在着清洗不干净,自动化程度低等技术问题,提供了一种激光清洗方法及清洗装置。
4.鉴于以上问题,本发明实施例提供的一种激光清洗方法,包括
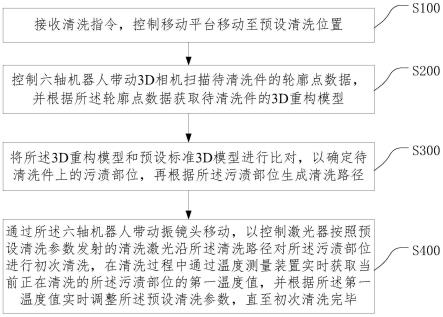
5.接收清洗指令,控制移动平台移动至预设清洗位置;
6.控制六轴机器人带动3d相机扫描待清洗件的轮廓点数据,并根据所述轮廓点数据获取待清洗件的3d重构模型;
7.将所述3d重构模型和预设标准3d模型进行比对,以确定待清洗件上的污渍部位,再根据所述污渍部位生成清洗路径;
8.通过所述六轴机器人带动振镜头移动,以控制激光器按照预设清洗参数发射的清洗激光沿所述清洗路径对所述污渍部位进行初次清洗,在清洗过程中通过温度测量装置实时获取当前正在清洗的所述污渍部位的第一温度值,并根据所述第一温度值实时调整所述预设清洗参数,直至确认所述初次清洗完毕。
9.可选地,所述在清洗过程中通过温度测量装置实时获取当前正在清洗的所述污渍部位的第一温度值,并根据所述第一温度值实时调整所述预设清洗参数,包括:
10.在所述第一温度值大于预设温度上限阈值时,降低所述预设清洗参数中的激光功率。
11.可选地,所述在所述第一温度值大于预设温度上限阈值时,降低所述预设清洗参数中的激光功率之后,还包括:
12.通过所述温度测量装置持续获取所述待清洗件上当前正在清洗的所述污渍部位的的第二温度值;
13.在所述第二温度值大于预设温度极限阈值时,控制所述污渍部位的初次清洗暂停,并继续检测当前暂停初次清洗的所述污渍部位的第三温度值;所述预设温度极限阈值大于所述预设温度上限阈值;
14.在所述第三温度值低于预设工作温度值时,控制所述污渍部位的初次清洗重启;所述预设工作温度值小于所述预设温度上限阈值。
15.可选地,所述确认所述初次清洗完毕之后,包括:
16.控制所述六轴机器人带动2d相机获取待清洗件初次清洗后的2d平面图像;
17.通过所述2d平面图像和所述3d重构模型确定所述待清洗件上未被清洗干净的污渍部位,并通过所述六轴机器人带动所述清洗激光对未被清洗干净的污渍部位进行再次清洗;
18.通过所述2d相机获取再次清洗之后的所述待清洗件的再清洗2d图像,在所述再清洗2d图像满足预设清洗要求时,确认待清洗件清洗完毕。
19.可选地,所述通过所述六轴机器人带动振镜头移动,以控制激光器按照预设清洗参数发射的清洗激光沿所述清洗路径对所述污渍部位进行初次清洗,包括:
20.通过所述六轴机器人带动振镜头沿所述清洗路径移动至所述污渍部位上方;
21.控制激光器按照预设清洗参数发射清洗激光,并在控制所述振镜头在预设角度范围内摆动的同时,通过所述六轴机器人带动所述振镜头沿预设污渍清洗路径移动,以对所述污渍部位进行初次清洗;其中,所述振镜头的摆动方向垂直于所述振镜头的移动方向;
22.所述通过所述六轴机器人带动所述清洗激光对未被清洗干净的污渍部位进行再次清洗,包括:
23.通过所述六轴机器人带动振镜头移动至未被清洗干净的污渍部位的上方;
24.控制激光器发射清洗激光,并控制所述振镜头在所述预设角度范围摆动的同时,通过所述六轴机器人带动所述振镜头沿预设污渍清洗路径移动,以对所述污渍部位进行再次清洗。
25.可选地,所述通过所述2d平面图像和所述3d重构模型确定所述待清洗件上未被清洗干净的污渍部位,并通过所述六轴机器人带动所述清洗激光对未被清洗干净的污渍部位进行再次清洗,还包括:
26.对所述2d平面图像和所述3d重构模型进行比对,确定所述2d平面图像和所述3d重构模型中均存在的污渍部位,并将均存在的污渍部位确定为所述待清洗件上未被清洗干净的污渍部位;
27.根据未被清洗干净的所述污渍部位生成所述待清洗件的再清洗图档;所述再清洗图档中包括未被清洗干净的污渍部位的蒙皮残留数据;
28.根据所述蒙皮残留数据增大所述预设清洗参数中的激光功率;
29.通过所述六轴机器人带动振镜头移动,以控制激光器按照增大激光功率之后的所述预设清洗参数发射清洗激光对未被清洗干净的污渍部位进行再次清洗。
30.本发明另一实施例还提供了一种清洗装置,包括控制器、六轴机器人、移动平台、用于发出清洗激光的激光器,用于扫描待清洗件的3d相机、用于拍摄待清洗件的2d相机、用于导出清洗激光的振镜头,以及用于检测待清洗件温度的温度测量装置;所述控制器用于执行上述的激光清洗方法;所述控制器、所述六轴机器人以及所述激光器均安装在所述移动平台上;
31.所述振镜头、所述3d相机、所述2d相机以及所述温度测量装置均安装在所述六轴机器人的输出端;所述振镜头、所述3d相机、所述2d相机以及所述温度测量装置均连接所述控制器;所述振镜头连接所述控制器。
32.可选地,所述清洗装置还包括用于除去粉尘的除尘器,所述除尘器安装在所述振镜头的输出端。
33.可选地,所述清洗装置还包括用于照亮待清洗件的光源,所述光源安装在所述六轴机器人的输出端。
34.可选地,所述清洗装置还包括固定板和连接柱,所述连接柱的一端安装在所述六轴机器人的输出端,所述连接柱的另一端连接所述固定板;所述振镜头、所述3d相机、所述2d相机以及所述温度测量装置均安装在所述固定板上。
35.本技术中,所述六轴机器人带动3d相机扫描待清洗件的轮廓点数据,并根据所述轮廓点数据获取待清洗件的3d重构模型;并将所述3d重构模型和预设标准3d模型进行比对,以确定待清洗件上的污渍部位;所述六轴机器人带动振镜头移动,以控制激光器按照预设清洗参数发射的清洗激光沿所述清洗路径对所述污渍部位进行初次清洗,直至所述初次清洗完毕。本激光清洗方法通过所述3d相机实现了非接触式轮廓跟踪技术,通过所述激光器和所述振镜头实现了激光清洗技术,该激光清洗方法可实现待清洗件的自动化清洗,并提高了待清洗物的清洗效率和清洗质量。另外,在初次清洗过程中通过温度测量装置实时获取当前正在清洗的所述污渍部位的第一温度值,并根据所述第一温度值实时调整所述预设清洗参数;也即本激光清洗方法通过所述温度测量装置实现了在线监控技术,避免了所述污渍部位因温度过高而出现损坏该待清洗件的事故。
附图说明
36.下面结合附图和实施例对本发明进一步说明。
37.图1为本发明一实施例提供的激光清洗方法的流程图;
38.图2为图1中步骤s400之后的流程图;
39.图3为本发明一实施例提供的清洗装置的结构示意图;
40.图4为图3中清洗装置的部分结构示意图;
41.图5为图3中清洗装置的另一视角的部分结构示意图。
42.说明书中的附图标记如下:
43.1、控制器;2、六轴机器人;21、固定板;22、连接柱;3、激光器;4、3d相机、5、2d相机;6、振镜头;7、温度测量装置;8、除尘器;9、光源;10、移动平台。
具体实施方式
44.为了使本发明所解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步的详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
45.需要理解的是,术语“上”、“下”、“左”、“右”、“前”、“后”、“中部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为本发明的限制。
46.如图1所示,本发明一实施例提供了一种激光清洗方法,包括
47.s100、接收清洗指令,控制移动平台10移动至预设清洗位置;可以理解地,所述移动平台10可自动地移动到预设清洗位置,所述移动平台带动控制器1、六轴机器人2以及激光器3移动至预设清洗位置;该预设清洗位置为对待清洗件进行激光清洗时,移动平台10固
定的位置。
48.s200、控制六轴机器人2带动3d相机4扫描待清洗件的轮廓点数据,并根据所述轮廓点数据获取待清洗件的3d重构模型;可以理解地,所述六轴机器人2带动所述3d相机4对待清洗件进行扫描,以获取待清洗件的轮廓点数据;采用逆向工程处理所述轮廓点数据,从而可以根据所述轮廓点数据获取待清洗件的3d重构模型。
49.s300、将所述3d重构模型和预设标准3d模型进行比对,以确定待清洗件上的污渍部位(也即待清洗部位),再根据所述污渍部位生成清洗路径;可以理解地,所述3d重构模型为含有污渍的待清洗件的3d模型,所述标准3d模型为不包含污渍的待清洗件的3d模型(所述标准3d模型通过三维软件建模时所绘制的3d模型,也可以是通过扫描仪扫描干净的待清洗件后重建的3d模型),通过所述3d重构模型包含有污渍,而所述标准3d模型不包含污渍,从而通过所述所述3d重构模型和预设标准3d模型的对比,可以获得待清洗件的多个污渍部位,通过多个所述污渍部位的空间位置,来确定所述振镜头6最优的清洗路径。
50.s400、通过所述六轴机器人2带动振镜头6移动,以控制激光器3按照预设清洗参数发射的清洗激光沿所述清洗路径对所述污渍部位进行初次清洗,在清洗过程中通过温度测量装置实时获取当前正在清洗的所述污渍部位的第一温度值,并根据所述第一温度值实时调整所述预设清洗参数,直至确认所述初次清洗完毕;可以理解地,所述预设参数包括但不限于功率等,其可以根据实际需求来设定;进一步地,由于待清洗件上具有多个位置的污渍部位,当所述六轴机器人2带动所述振镜头6运动至当前需要清洗的污渍部位上方时,所述六轴机器人2停止带动所述振镜头6移动,所述激光器3通过所述振镜头6发出清洗激光对当前污渍部位进行激光清洗;当前污渍部位清洗完毕之后,所述六轴机器人2带动所述振镜头6沿所述清洗路径移动至下一个污渍部位;所述清洗部位为所述六轴机器人带动所述振镜头6移动的最优路径,从而提高了待清洗件的清洗效率。具体地,在所述六轴机器人2带动所述振镜头6对所有所述污渍部位初次清洗完成之后,确认所述初次清洗完毕。
51.进一步地,由于所述激光器3通过振镜头6发出的清洗激光对污渍部位进行清洗的过程中,污渍部位的温度因受到激光清洗而上升;故在清洗激光对污渍部位进行清洗的过程中,所述温度测量装置7实时获取污渍部位的第一温度值,根据所述第一温度值来调整激光器3的预设清洗参数,使得所述激光器3发出较弱的清洗激光继续对所述污渍部位进行清洗,确保待清洗件的当前污渍部位在预设安全温度下被所述清洗激光进行清洗,避免所述污渍部位因温度过高而出现损坏该待清洗件的事故。
52.在一实施例中,所述通过所述六轴机器人2带动振镜头6移动,以控制激光器3按照预设清洗参数发射的清洗激光沿所述清洗路径对所述污渍部位进行初次清洗(也即步骤s400),包括:
53.通过所述六轴机器人2带动振镜头6沿所述清洗路径移动至所述污渍部位上方;可以理解地,所述六轴机器人2带动所述振镜头6移动至污渍部位的上方时,所述激光器3通过所述振镜头6发出的清洗激光与当前需要清洗的污渍部位垂直。
54.控制激光器3按照预设清洗参数发射清洗激光,并在控制所述振镜头6在预设角度范围内摆动的同时,通过所述六轴机器人2带动所述振镜头6沿预设污渍清洗路径移动,以对所述污渍部位进行初次清洗;其中,所述振镜头6的摆动方向垂直于所述振镜头6的移动方向;可以理解地,所述预设角度和所述预设物质清洗路径可以根据实际需求来来设定;具
体地。在振镜头6对待清洗件的待清洗部位进行清洗的过程中,所述振镜头6自身将发生摆动的同时,所述六轴机器人2带动所述振镜头6移动,通过两者的复合运动,所述激光器3通过所述振镜头6发出的清洗激光将产生一个清洗的面区域,该清洗的面区域照射在污渍部位上,并对污渍部位完成激光清洗。
55.本技术中,所述六轴机器人2带动3d相机4扫描待清洗件的轮廓点数据,并根据所述轮廓点数据获取待清洗件的3d重构模型;并将所述3d重构模型和预设标准3d模型进行比对,以确定待清洗件上的污渍部位;所述六轴机器人2带动振镜头6移动,以控制激光器3按照预设清洗参数发射的清洗激光沿所述清洗路径对所述污渍部位进行初次清洗,直至所述初次清洗完毕。本激光清洗方法通过所述3d相机4实现了非接触式轮廓跟踪技术,通过所述激光器3和所述振镜头6实现了激光清洗技术,该激光清洗方法可实现待清洗件的自动化清洗,并提高了待清洗物的清洗效率和清洗质量。另外,在初次清洗过程中通过温度测量装置实时获取当前正在清洗的所述污渍部位的第一温度值,并根据所述第一温度值实时调整所述预设清洗参数;也即本激光清洗方法通过所述温度测量装置7实现了在线监控技术,避免了所述污渍部位因温度过高而出现损坏该待清洗件的事故。
56.在一实施例中,如图2所示,所述确认所述初次清洗完毕之后(也即步骤s400之后),包括:
57.s500、控制所述六轴机器人2带动2d相机5获取待清洗件初次清洗后的2d平面图像;可以理解地,所述六轴机器人2带动所述振镜头6完成待清洗件的初次清洗后,所述待清洗件上还可能残留有未清洗干净的污渍部位;此时,需要通过所述六轴机器人2带动所述2d相机5获取所述污渍部位已经完成初次清洗后的2d平面图像。
58.s600、通过所述2d平面图像和所述3d重构模型确定所述待清洗件上未被清洗干净的污渍部位,并通过所述六轴机器人2带动所述清洗激光对未被清洗干净的污渍部位进行再次清洗;可以理解地,所述2d平面图像上可以显示出未清洗干净的污渍部位和已经清洗干净的部位,所述3d重构模型通过投影、包覆等等处理方式获取对比平面图像,该对比平面图像上显示有待清洗件上所有的污渍部位,通过所述2d平面图像和比平面图像的对比,可以确定所述待清洗件上未被清洗干净的污渍部位。且所述六轴机器人2带动所述振镜头6直接移动至未被清洗干净的污渍部位,所述激光器3通过所述振镜头6发出清洗激光对未被清洗干净的污渍部位进行激光清洗。
59.s600、通过所述2d相机5获取再次清洗之后的所述待清洗件的再清洗2d图像,在所述再清洗2d图像满足预设清洗要求时,确认待清洗件清洗完毕。可以理解地,在所述六轴机器人2对未被清洗干净的污渍部位清洗完毕之后,所述六轴机器人2再次带动所述2d相机5获取再清洗部位的再清洗2d图像,根据该再清洗2d图像满足预设清洗要求(也即,通过所述再清洗2d图像和所述3d重构模型来判断所述待清洗件上是否还存在未被清洗干净的污渍部位);若再清洗2d图像满足预设清洗要求时,确认待清洗件清洗完毕;若再清洗2d图像不满足预设清洗要求时,所述六轴机器人2再次带动所述振镜头6对再清洗2d图像对应的未清洗干净的污渍部位进行清洗,直至所述再清洗2d图像满足预设清洗要求位置为止。
60.在一实施例中,所述通过所述六轴机器人2带动所述清洗激光对未被清洗干净的污渍部位进行再次清洗(也即所述s600),包括:
61.通过所述六轴机器人2带动振镜头6移动至未被清洗干净的污渍部位的上方;可以
理解地,所述六轴机器人2带动所述振镜头6清洗干净的污渍部位的上方时,所述激光器3通过所述振镜头6发出的清洗激光与当前未干净的污渍部位垂直。
62.控制激光器3发射清洗激光,并控制所述振镜头6在所述预设角度范围摆动的同时,通过所述六轴机器人2带动所述振镜头6沿预设污渍清洗路径移动,以对所述污渍部位进行再次清洗。具体地。在振镜头6对待清洗件的待清洗部位进行清洗的过程中,所述振镜头6自身将发生摆动的同时,所述六轴机器人2带动所述振镜头6移动,通过两者的复合运动,所述激光器3通过所述振镜头6发出的清洗激光将产生一个清洗的面区域,该清洗的面区域照射在未干净的污渍部位上,并对未干净的污渍部位进行激光清洗。
63.本实施例中,在初次清洗完成之后,控制所述六轴机器人2带动2d相机5获取待清洗件初次清洗后的2d平面图像;通过所述2d平面图像和所述3d重构模型确定所述待清洗件上未被清洗干净的污渍部位,并通过所述六轴机器人2带动所述清洗激光对未被清洗干净的污渍部位进行再次清洗;通过所述六轴机器人2带动所述振镜头6再次清洗所述再清洗部位,直至所述在清洗部位满足清洗要求。本激光清洗方法通过所述3d相机4实现了非接触式轮廓跟踪技术,通过所述激光器3和所述振镜头6实现了激光清洗技术,通过所述2d相机5和所述3d相机4的结合,实现了对未清洗干净的污渍部位再次清洗的技术,该激光清洗方法可实现待清洗件的自动化清洗,并提高了待清洗物的清洗效率和清洗质量。
64.在一实施例中,所述在清洗过程中通过温度测量装置实时获取当前正在清洗的所述污渍部位的第一温度值,并根据所述第一温度值实时调整所述预设清洗参数(也即步骤s400),包括:
65.在所述第一温度值大于预设温度上限阈值时,降低所述预设清洗参数中的激光功率。可以理解地,所述预设温度上限阈值可以根据实际需求来确定(也即根据待清洗件本身的材料属性来确定,也即不同材料的待清洗件其预设温度上限阈值也不同);在所述清洗激光对污渍部位进行激光清洗的过程中,所述温度测量装置7实时监测当前正在清洗的污渍部位的温度大于所述温度上限阈值,降低所述激光器3的预设清洗参数中的激光功率等,以使得所述激光器3发射较弱的激光对所述污渍部位进行激光清洗,从而避免所述污渍部位因温度过高而损坏该待清洗件的事故的同时,所述激光器3发出的清洗激光持续对污渍部位进行清洗,从而提高了待清洗件的清洗效率。另外,所述预设温度上限阈值的设置,可以避免所述待清洗件因温度过高而导致破坏待清洗件的材料的事故。
66.进一步地,所述在所述第一温度值大于预设温度上限阈值时,降低所述预设清洗参数中的激光功率之后,还包括:
67.通过所述温度测量装置7持续获取所述待清洗件上当前正在清洗的所述污渍部位的的第二温度值;可以理解地,降低所述预设清洗参数中的激光功率之后,清洗激光清洗的污渍部位时,所述污渍部位的温度还会持续上升,但此时污渍部位温度上升的速度低于未调整预设清洗工艺之前的温度上升速度;故还需要持续实时检测待清洗件的第二温度值。
68.在所述第二温度值大于预设温度极限阈值时,控制所述污渍部位的初次清洗暂停,并继续检测当前暂停初次清洗的所述污渍部位的第三温度值;所述预设温度极限阈值大于所述预设温度上限阈值;可以理解地,所述预设温度极限阈值可以根据待清洗件材料类型来取值,当待清洗件的表面温度大于所述预设温度极限阈值是,将损坏待清洗件的内部结构;具体地,在检测到清洗温度大于预设温度极限阈值时,此时,若清洗激光继续对所
述污渍部位进行激光清洗,所述污渍部位因温度过高将损坏其待清洗件的内部结构;故此时所述激光器3需要停止发射清洗激光,也即所述污渍部位的初次清洗暂停。在初次清洗暂停之后,还需要实时通过所述温度测量装置7检测当前暂停初次清洗的所述污渍部位的第三温度值。
69.在所述第三温度值低于预设工作温度值时,控制所述污渍部位的初次清洗重启;所述预设工作温度值小于所述预设温度上限阈值。可以理解地,所述预设工作温度值可以根据实际需求来取值。具体地,停止对污渍部位初次清洗后,可以等待所述污渍部位的第三温度冷却到所述预设预设工作温度值以下,也可以利用冷却系统中的冷却液对高温的高位的污渍部位进行降温至所述预设工作温度值以下,所述激光器3通过振镜头6发出清洗激光继完成物质部位的激光清洗工作。
70.在另一实施例中,所述污渍部位的初次清洗暂停后,还可以发出超温警报,提示工作人员对激光清洗装置进行检修,以及进一步调整振镜头6的清洗工艺参数。本实施例中,该激光清洗方法保证了待清洗件不会因温度过高而发生损坏其结构的事故,提高了激光清洗的安全性。
71.在一实施例中,所述通过所述2d平面图像和所述3d重构模型确定所述待清洗件上未被清洗干净的污渍部位,并通过所述六轴机器人2带动所述清洗激光对未被清洗干净的污渍部位进行再次清洗(也即步骤s600),还包括:
72.对所述2d平面图像和所述3d重构模型进行比对,确定所述2d平面图像和所述3d重构模型中均存在的污渍部位,并将均存在的污渍部位确定为所述待清洗件上未被清洗干净的污渍部位;可以理解地,所述2d平面图像上可以显示出未清洗的污渍部位和已经清洗干净的部位,所述3d重构模型通过投影、包覆等等处理方式获取对比平面图像,该对比平面图像上显示有待清洗件上所有的污渍部位,通过所述2d平面图像和比平面图像的对比,可以确定所述待清洗件上未被清洗干净的污渍部位。
73.根据未被清洗干净的所述污渍部位生成所述待清洗件的再清洗图档;所述再清洗图档中包括未被清洗干净的污渍部位的蒙皮残留数据;可以理解地,清洗干净的污渍部位利用所述逆向分析算法可以生成所述再清洗图档,所述在清洗图档中可以呈现未清洗干净的污渍部位的蒙皮残留数据。
74.根据所述蒙皮残留数据增大所述预设清洗参数中的激光功率;可以理解地,根据所述蒙皮残留数据可以自行调整所述激光器3的预设清洗参数,包括增大所述预设清洗参数中的激光功率。
75.通过所述六轴机器人2带动振镜头6移动,以控制激光器3按照增大激光功率之后的所述预设清洗参数发射清洗激光对未被清洗干净的污渍部位进行再次清洗。可以理解地,所述激光器3发出较强的清洗激光对未清洗干净的部位进行激光清洗,也即未清洗干净的污渍部位在较强的清洗激光的作用下,更容易清洗干净。本实施例中,该激光清洗方法进一步提高了待清洗件的清洗质量。
76.如图3至图5所示,本发明另一实施例还提供了一种清洗装置,包括控制器1、六轴机器人2、移动平台10、用于发出清洗激光的激光器3,用于扫描待清洗件的3d相机4、用于拍摄待清洗件的2d相机5、用于导出清洗激光的振镜头6,以及用于检测待清洗件温度的温度测量装置7;所述控制器1用于上述的激光清洗方法;可以理解地,所述温度测量装置7包括
但不限于红外相机等,所述3d相机4包括但不限于ccd(charge coupled device,电荷耦合器件)相机等。
77.所述控制器1、所述六轴机器人2以及所述激光器3均安装在所述移动平台10上。具体地,所述移动平台10的底部设置有滚轮和液压支撑柱,所述滚轮可以起到移动该清洗装置的技术效果,所述液压支撑柱可以起到支撑并固定该清洗装置的技术效果。本实施例中,该移动平台10可以带动所述六轴机器人2、所述激光器3以及所述控制器1整体移动,提高了该清洗装置的便捷性和适用性。
78.所述振镜头6、所述3d相机4、所述2d相机5以及所述温度测量装置7均安装(通过螺钉连接等方式安装)在所述六轴机器人2的输出端;所述振镜头6、所述3d相机4、所述2d相机5以及所述温度测量装置7均连接(通过电缆连接等)所述控制器1;所述振镜头6连接(通过光纤连接等)所述控制器1。
79.在一具体实施例中,所述六轴机器人2为臂展3m,最大速度大2m/s;其中振镜头6为单维振镜,其聚焦光斑为板条状。所述3d相机4为一体式高分辨率高速3d相机4,为线结构光扫描方式,扫描长度达2m。所述温度测量装置7为红外相机,且该红外相机为长波段的相机,可监测的波段为8-14μm,监测温度范围为-30℃-250℃,监测精度可达
±
2℃。
80.本技术中,所述控制器1控制所述六轴机器人2带动所述3d相机4对待清洗件进行扫描,以获取待清洗件的轮廓点数据;所述控制器1采用逆向工程处理所述轮廓点数据,以获取待清洗件的3d重构模型;所述控制器1通过所述3d重构模型和标准3d模型的比较,并获取待清洗件的污渍部位和清洗路径;所述控制器1控制所述六轴机器人2根据所述清洗路径带动所述振镜头6对所述待清洗部位进行清洗;在所述振镜头6对所述待清洗部位进行清洗的过程中,所述控制器1控制所述温度测量装置7实时获取污渍部位的温度值,利用所述温度值控制所述振镜头6在安全温度范围内对所述污渍部位进行激光清洗;当所述六轴机器人2带动振镜头6完成待清洗件初次之后,所述控制器1通过所述六轴机器人2带动所述2d相机5移动,并获取未清洗干净的污渍部位;所述控制器1通过所述六轴机器人2带动所述振镜头6移动至未清洗干净的污渍部位,直至所述未清洗干净的污渍部位清洗干净位置。该清洗装置提高了待清洗件的清洗质量和清洗效率,同时避免了待清洗件因温度过高而损坏其内部结构的事故。
81.在一实施例中,如图3和图4所示,所述清洗装置还包括用于除去粉尘的除尘器8,所述除尘器8安装在所述振镜头6的输出端。可以理解地,所述除尘器8在工作过程中会产生真空负压,所述激光器3通过所述振镜头6发出的清洗激光对待清洗件进行激光清洗的过程中,待清洗件上会产生粉尘,该除尘器8会产生真空负压,该真空负压将吸收所述待清洗件上的粉尘。进一步地,所述除尘器8与所述振镜头6同轴设置,同轴设置的除尘器8会实时吸收激光清洗过程中所产生的粉尘,达到同步和实时吸收粉尘的技术效果,进一步提高了待清洗件的清洗质量,避免了粉尘对环境的污染,实现了绿色清洗的技术效果;另外,所述除尘器8还可以避免粉尘吸附到振镜头6上,提高了振镜头6的使用寿命。
82.在一实施例中,如图4和图5所示,所述清洗装置还包括用于照亮待清洗件的光源9,所述光源9安装在所述六轴机器人2的输出端。可以理解地,所述六轴机器人2带动所述3d相机4和所述2d相机5移动的过程中,将同步带动所述光源9移动;且所述光源9可以照亮所述待清洗件,提高了所述3d相机4和所述2d相机5获取的待清洗物的图像的清晰度,从而进
一步提高了该激光清洗装置的清洗质量。
83.在一实施例中,如图3和图4所示,所述清洗装置还包括固定板21和连接柱22,所述连接柱22的一端安装在所述六轴机器人2的输出端,所述连接柱22的另一端连接所述固定板21;所述振镜头6、所述3d相机4、所述2d相机5以及所述温度测量装置7均安装在所述固定板21上。可以理解地,所述连接柱22连接在所述六轴机器人2的第六轴上,所述固定板21为所述振镜头6、所述3d相机4、所述2d相机5以及所述温度测量装置7提供了安装空间。本实施中,所述连接柱22和所述固定板21的设计,提高了该激光清洗装置安装的便捷性。
84.以上仅为本发明较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1