一种用于马桶的机器人吹尘系统的制作方法
1.本实用新型涉及马桶生产设备技术领域,尤其涉及一种用于马桶的机器人吹尘系统。
背景技术:
2.在陶瓷马桶的生产过程需要对马桶坯体内外表面吹尘,其目的是消除坯体内外表面的粉尘,为喷釉工作做准备。现在各厂家都是人工手持高压气管利用压缩空气对马桶内外表面进行吹尘的。现有的操作方式存在以下问题:1、吹尘过程会产生很多粉尘,对工人伤害很大,易造成职业病。2、压缩空气噪声很大,对工人耳朵伤害很大,易造成职业病。3、受个人情绪、熟练程度、责任心等因素的影响,吹尘质量很不稳定,不可控。
技术实现要素:
3.本实用新型所要解决的技术问题在于,提供一种用于马桶的机器人吹尘系统,可实行自动化吹尘,减少对工人身体的损害,吹尘质量高。
4.为解决上述技术问题,本实用新型提供了一种用于马桶的机器人吹尘系统,包括吹尘房、输送线、识别马桶位置的视觉部件、设于所述输送线侧面的机器人以及与所述机器人可拆卸连接的吹尘枪组件;
5.所述输送线上设有用于放置马桶的工装板,用于阻挡所述工装板的前阻挡器及后阻挡器、以及用于带动所述工装板上的马桶转动的旋转升降组件;
6.所述视觉部件与机器人的控制系统连接,所述机器人包括可旋转的底座、与底座连接的大臂以及与大臂连接的小臂,所述吹尘枪组件与所述小臂可拆卸连接。
7.作为上述技术方案的改进,所述前阻挡器包括前挡板,驱动所述前挡板升降的前升降缸、控制所述前升降缸的第一电控阀以及感应马桶位置的第一传感器。
8.作为上述技术方案的改进,所述后阻挡器包括后挡板,驱动所述后挡板升降的后升降缸、控制所述后升降缸的第二电控阀以及感应马桶位置的第二传感器。
9.作为上述技术方案的改进,所述旋转升降组件包括升降台、设于所述升降台内的丝杠螺母、与所述丝杠螺母配合的丝杠及与所述丝杠连接的安装台。
10.作为上述技术方案的改进,所述吹尘房的正面开放设置以放置所述机器人,其侧面设有用于马桶及运输线通过的窗口,其背面及顶面封闭设置。
11.作为上述技术方案的改进,所述吹尘房的顶面设有负压吹尘装置。
12.作为上述技术方案的改进,所述吹尘枪组件包括吹尘枪及与所述吹尘枪连接的供气管道。
13.作为上述技术方案的改进,所述吹尘房的顶面还设有视觉部件,所述视觉部件包括工业相机,所述工业相机外设有防尘罩。
14.实施本实用新型,具有如下有益效果:
15.本实用新型通过机器人带动吹尘枪组件对马桶坯体内外表面精准吹尘,不但替代
了人工,避免了工人发生职业病的风险,又实现了智能精准吹尘,保证了质量,提高了效益。
附图说明
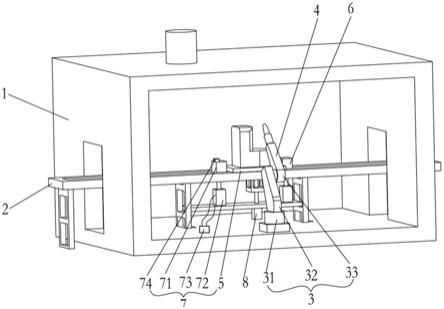
16.图1及图2是本实用新型涉及的吹尘系统的三维示意图。
具体实施方式
17.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型作进一步地详细描述。仅此声明,本实用新型在文中出现或即将出现的上、下、左、右、前、后、内、外等方位用词,仅以本实用新型的附图为基准,其并不是对本实用新型的具体限定。
18.参见图1及图2,为解决上述技术问题,本实用新型提供了一种用于马桶的机器人吹尘系统,包括吹尘房1、输送线2、设于所述输送线2侧面的机器人3以及与所述机器人3可拆卸连接的吹尘枪组件4;
19.所述输送线2上设有用于放置马桶的工装板5,用于阻挡所述工装板5的前阻挡器6及后阻挡器7、以及用于带动所述工装板5上的马桶转动的旋转升降组件8;
20.所所述机器人3包括可旋转的底座31、与底座31连接的大臂32以及与大臂32连接的小臂33,所述吹尘枪组件4与所述小臂33可拆卸连接。
21.需要说明的是,所述吹尘房1设在输送线2合适的位置上,以便对吹尘产生的灰尘集中处理,避免对吹尘系统外的区域造成影响。所述前阻挡器6及后阻挡器7能限定马桶的位置及确定吹尘的工位,同时用于有序调控旋转升降组件8的工作状态,从而实现可靠吹尘。具体地,马桶被放置在工装板5上沿所述输送线2向前运输,工装板5被后阻挡器7阻挡时,所述旋转升降组件8位于低位;所述后阻挡器7释放工装板5,当工装板5被前阻挡器6阻挡时,所述旋转升降组件8工作,将马桶抬高,所述机器人3带动吹尘枪组件4对马桶内外按预定程序吹尘。由于机器人3包括可旋转的底座31、大臂32及小臂33,其具有较为复杂的工作轨迹,从而有效对马桶内外进行精准除尘,除尘效果好,且效率高。
22.所述前阻挡器6及后阻挡器7均可采用人工的方式打开,但为进一步解放工人的双手,提高自动化水平,本实施例中的前阻挡器6包括前挡板61,驱动所述前挡板61升降的前升降缸62、控制所述前升降缸62的第一电控阀63以及感应马桶位置的第一传感器64。所述后阻挡器7包括后挡板71,驱动所述后挡板71升降的后升降缸72、控制所述后升降缸72的第二电控阀73以及感应马桶位置的第二传感器74。
23.具体地,当所述第二传感器74感应到工装板5的位置后,所述旋转升降组件8处于低位,再通过所述第二电控阀73控制所述后升降缸72带动后挡板71向下运动,使工装板5继续向前运动;当所述第一传感器64感应到所述第一工装板5时,所述第一电控阀63控制所述前升降缸62启动,带动前挡板61对工装板5阻挡,同时所述输送线2停止运行,所述旋转升降组件8向上顶出,并带动马桶转动;所述机器人3带动吹尘枪组件4对马桶内外除尘;除尘完毕后,所述旋转升降组件8向下运动,将所述工装板5放置在输送线2上,所述输送线2启动;所述第一电控阀63控制所述前升降缸62带动挡板向下运动,释放所述工装板5,将马桶带至下一工序。
24.所述旋转升降组件8可采用现有的液压升降机构配合齿轮机构来实现,但不限于此。在本实施例中,所述旋转升降组件8包括升降台81、设于所述升降台81内的丝杠螺母82、
与所述丝杠螺母82配合的丝杠83及与所述丝杠83连接的安装台84。具体地,所述安装台84与所述输送线2固定,所述丝杠83上连接有电机85,通过电机85驱动丝杠83转动,从而升降台81做旋转升降运动。
25.为便于放置机器人3及尽可能的提高除尘效果。所述吹尘房1的正面开放设置以放置所述机器人3,其侧面设有用于马桶及运输线通过的窗口11,其背面及顶面封闭设置。
26.所述吹尘房1的顶面设有负压吹尘装置9。所述负压吹尘装置9包括抽风机91及除尘管道92。所述除尘管道92内有吸附过滤灰尘的吸附除尘袋93。
27.进一步地,所述吹尘枪组件4包括吹尘枪41及与所述吹尘枪41连接的供气管道42。通过调控所述供气管道42的气压,对马桶有效除尘。
28.所述吹尘房1的顶面还设有视觉部件10,所述视觉部件10包括工业相机101,所述工业相机101设于所述吹尘房1的顶面,所述工业相机101外设有防尘罩。所述视觉系统可获取马桶的位置信息,通过控制系统处理后用于调控工业机器人3的初始位置,从而避免误触马桶,造成马桶损坏。
29.综上,本实用新型提供了一种马桶的机器人3吹尘系统,利用机器人3带动吹尘枪组件4对马桶坯体内外表面精准吹尘,不但替代了人工,避免了工人发生职业病的风险,又实现了智能精准吹尘,保证了质量,提高了效益。
30.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1