一种激光去污自动测距装置
1.本技术涉及激光去污设备技术领域,具体涉及一种激光去污自动测距装置。
背景技术:
2.核设施在运行过程中,结构材料的腐蚀产物和回路冷却剂受中子活化形成的放射性物质,在传送过程中沉积在系统的管道、阀门及水泵表面。随着核电站服役时间的增长,放射性物质积累日益增多,导致系统辐射场增强,工作人员受辐照剂量增加。因此,需要定期或不定期进行核设施表面去污,保障核电站安全运行,降低运行人员集体辐射剂量。激光清洗去除核设施表面的放射性污染物是一种“绿色、环保、高效”的方法。
3.核电厂运行过程中产生的放射性污染金属部件主要为失效的过滤器金属框架、维检修过程中沾污的脚手架、替换下来的废旧回路管道/阀门/泵、报废设备/工器具/零部件、废旧放射性废物容器等;主要污染核素以活化核素为主,如
54
mn、
60
co、
110m
ag等;表面污染水平 0.4-1000bq/cm2,其中过滤器框架(平板)、脚手架(圆管)、废物包装容器解体废物(圆弧板)等产生量较大且表面污染水平较低,无体污染,经激光去污后可达到解控要求,实现废物最小化。
4.现有的激光清洗装置,在清洗过程中不能根据待去污工件表面的三维形貌对应调整清洗激光束的位置,导致在清洗三维形貌相对复杂的工件时,不能达到高效、可靠的去污效果。
技术实现要素:
5.本技术要解决的技术问题是:现有的激光清洗装置在清洗三维形貌相对复杂的工件时,不能根据待去污工件表面的三维形貌对应调整清洗激光束的位置,无法达到高效、可靠的去污效果。
6.为了解决上述技术问题,本技术的目的在于提供一种激光去污自动测距装置,包括一激光去污装置和设于所述激光去污装置上的三维扫描装置,所述激光去污装置包括一防护罩、机器人、设于所述机器人一端的激光输出装置,以及设于所述机器人另一端的控制器,所述机器人与所述控制器连接,所述机器人用于控制激光输出装置的运动,以配合激光输出装置完成待去污工件表面的清洗去污工作。所述激光输出装置上安装有激光测距仪,所述激光测距仪用于测量激光输出装置到待去污工件表面的实时距离,并将测得的实时距离反馈输入至与所述机器人连接的控制器中,所述控制器的型号为irc5。
7.本技术的激光去污自动测距装置通过激光去污装置上的三维扫描装置先对工件进行三维形貌扫描,再通过激光输出装置上的激光测距仪测量每一位置到激光去污装置的距离,由激光输出装置的机器人根据控制器的距离比对调整激光输出装置到待去污工件表面的距离,使得激光去污装置能够高效、可靠的清除工件表面的核辐射污染物质,解决现有的激光清洗装置在清洗三维形貌相对复杂的工件时,不能根据待去污工件表面的三维形貌对应调整清洗激光束的位置,无法达到高效、可靠的去污效果的问题。
8.控制器连接示教器和机器人,可根据三维扫描的数据在示教器中编写机器人运动程序,以引导机器人控制激光输出装置运动。所述机器人包括能够在x、y、z三个方向上移动的机械臂,以便根据示教器中的程序进行运动。机械臂的两端分别连接所述激光去污装置和安装机械臂的基座,使机械臂固定连接基座。
9.优选的,所述防护罩为中空结构的空心壳体,防护罩靠近待去污工作面的底面开有多个安装孔,其中一个安装孔装配有激光发射头,其中两个安装孔内设有三维扫描装置,使得激光发射头发射的激光可以到达待去污工作面,所述防护罩的顶部敞口设置。
10.优选的,所述激光输出装置内设有激光发射头、振镜、聚焦透镜、平面保护镜,激光发射头用于产生激光束,振镜用于让激光束传输到聚焦透镜,聚焦透镜用于激光聚焦,平面保护镜用于保护激光器。所述激光输出装置上连接有导光光纤,导光光纤是激光器的光传输介质。
11.优选的,所述激光测距仪的下端面与所述激光发射头的下端面处于同一平面上,激光发射头的下端面即激光发射器中的激光束出口端,以便在激光测距仪测量激光输出装置到待去污工件表面的距离后,激光输出装置能够依据激光输出装置与待去污工件表面的距离同时进行激光去污。
12.优选的,所述激光测距仪的测量范围为160~450mm。
13.优选的,所述防护罩的一侧设有气溶胶收集器,所述气溶胶收集器设于所述激光发射头的下游侧,所述气溶胶收集器的开口呈上小下大的筒状,下部开口较大以便吸收激光去污过程中产生的含有放射性物质的气溶胶,避免放射性气溶胶泄露至外部环境中。
14.优选的,所述激光测距仪设置于所述激光输出装置的外侧壁上,具体的设于所述防护罩的外侧壁上,以便先进行激光测距,确定并调整激光去污装置距待去污工件表面的距离后,再通过激光发射头进行激光去污。
15.优选的,所述三维扫描装置包括用于激光发射的激光发射器和接收待去污工件表面反射的所述激光发射器发射激光的激光接收器,以及进行数据处理的数据处理计算机,所述三维扫描装置用于测量去污工件的三维形貌信息,并以点阵数据形式输出至与所述机器人连接的控制器中,所述数据处理计算机用于将三维扫描装置获取的信息转化为图像信息,再以数据点阵形式输出到激光去污装置中,便于激光去污装置根据数据点阵信息调整激光输出装置的位置。
16.相比现有技术,本技术具有以下优点:
17.本技术的激光去污自动测距装置,先通过三维扫描装置获得待去污工件的三维形貌信息,即三维扫描点阵数据,根据三维扫描装置获得待去污工件的三维扫描点阵数据,然后使用激光输出装置和其上设置的激光测距仪测量激光发射头距离待去污工件的距离,并由控制器控制机器人对激光输出装置的位置进行调整,使得激光输出装置能够保持在最佳的去污效果位置上,从而实现高效率、高精度、高可靠的去污效果,解决现有的激光清洗装置在清洗三维形貌相对复杂的工件时,不能根据待去污工件表面的三维形貌对应调整清洗激光束的位置,无法达到高效、可靠的去污效果的问题。
附图说明
18.图1是本技术实施例的去污流程框图,图中的三维扫描系统即三维扫描装置。
19.图2为本技术实施例激光去污自动测距装置的示意图。
20.图3为本技术实施例激光测距仪和激光发射器的相对位置示意图。
21.图4为本技术实施例激光测距仪和激光输出装置的相对位置示意图。
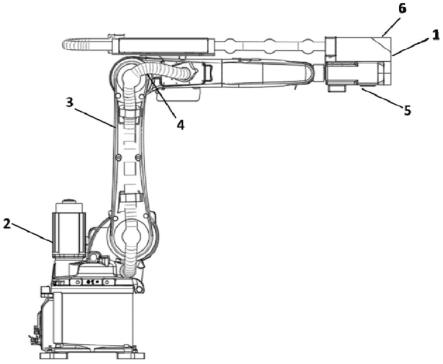
22.图5为本技术实施例激光去污自动测距装置的结构图,图中黑框内的部分均为机械臂。
23.图6为防护罩与激光输出装置的相对位置示意图。
24.图7为激光测距仪的测量距离范围示意图。
25.附图标号说明:图中,1、三维扫描装置;10、激光发射器;11、激光接收器;12、数据处理计算机;2、控制器;3、机器人;4、导光光纤;5、激光输出装置;50、激光发射头;6、气溶胶收集器;7、激光测距仪;8、待去污工件;9、防护罩;90、安装孔。
具体实施方式
26.下面结合附图和具体实施方式对本技术的技术方案进行清楚、完整的描述,显然,所描述的实施例仅是本技术的一部分实施例,而不是全部的实施例。
27.实施例:本实施例提供一种激光去污自动测距装置,包括一激光去污装置和设于所述激光去污装置上的三维扫描装置,所述激光去污装置包括一防护罩9、机器人3、设于所述机器人3一端的激光输出装置5,以及设于所述机器人3另一端的控制器2,所述机器人3与所述控制器2连接,所述机器人3用于控制激光输出装置5的运动,以配合激光输出装置5完成待去污工件8表面的清洗去污工作。所述激光输出装置5上安装有激光测距仪7,所述激光测距仪7用于测量激光输出装置5到待去污工件8表面的实时距离,并将测得的实时距离反馈输入至与所述机器人3连接的控制器2中,所述控制器2的型号为irc5。本技术的激光去污自动测距装置通过激光去污装置上的三维扫描装置1先对待去污工件8进行三维形貌扫描,再通过激光输出装置5上的激光测距仪7测量每一位置到激光去污装置的距离,由激光输出装置5的机器人3根据控制器2的距离比对调整激光输出装置5到待去污工件8表面的距离,使得激光去污装置能够高效、可靠的清除工件表面的核辐射污染物质,解决现有的激光清洗装置在清洗三维形貌相对复杂的工件时,不能根据待去污工件表面的三维形貌对应调整清洗激光束的位置,无法达到高效、可靠的去污效果的问题。
28.控制器2连接示教器和机器人3,可根据三维扫描的数据在示教器中编写机器人运动程序。所述机器人3包括能够在x、y、z三个方向上移动的机械臂,以便根据示教器中的程序进行运动。机械臂的两端分别连接所述激光去污装置和安装机械臂的基座,使机械臂固定连接基座。
29.具体的,如附图6所示,所述防护罩9为中空结构的空心壳体,防护罩9靠近待去污工作面的底面开有多个安装孔90,其中一个安装孔90装配有激光发射头50,其中两个安装孔90内设有三维扫描装置1,使得激光发射头50发射的激光可以到达待去污工作面,所述防护罩9的顶部敞口设置。
30.所述激光输出装置5内设有激光发射头、振镜、聚焦透镜、平面保护镜,激光发射头用于产生激光束,振镜用于让激光束传输到聚焦透镜,聚焦透镜用于激光聚焦,平面保护镜用于保护激光器。所述激光输出装置上连接有导光光纤,导光光纤是激光器的光传输介质。
31.具体的,如附图3所示,所述激光测距仪7的下端面与所述激光发射头50的下端面
处于同一平面上,激光发射头50的下端面即激光发射头50中的激光束出口端,以便在激光测距仪7测量激光输出装置到待去污工件8表面的距离后,激光输出装置5能够依据激光输出装置5与待去污工件8表面的距离同时进行激光去污。如附图7所示,所述激光测距仪7的测量范围d为160~450mm。
32.具体的,如附图2和5所示,所述防护罩9的一侧设有气溶胶收集器6,所述气溶胶收集器6设于所述激光发射头50的下游侧,所述气溶胶收集器6的开口呈上小下大的筒状,下部开口较大以便吸收激光去污过程中产生的含有放射性物质的气溶胶,避免放射性气溶胶泄露至外部环境中。
33.优选的,所述激光测距仪7设置于所述激光输出装置5的外侧壁上,具体的设于所述防护罩9的外侧壁上,以便先进行激光测距,确定并调整激光去污装置距待去污工件表面的距离后,再通过激光发射头进行激光去污。
34.优选的,所述三维扫描装置1包括用于激光发射的激光发射器 10和接收待去污工件表面反射的所述激光发射器10发射激光的激光接收器11,以及与激光接收器连接进行数据处理的数据处理计算机 12,数据处理计算机用于将激光接收器接收到的激光信息转换成点阵数据,并输送至控制器2,所述三维扫描装置用于测量去污工件的三维形貌信息,并以点阵数据形式输出至与所述机器人连接的控制器中,所述数据处理计算机用于将三维扫描装置获取的信息转化为图像信息,再以数据点阵形式输出到激光去污装置中,便于激光去污装置根据数据点阵信息调整激光输出装置的位置。
35.本技术的工作过程为:激光去污自动测距装置,先通过三维扫描装置获得待去污工件的三维形貌信息,即三维扫描点阵数据,根据三维扫描装置获得待去污工件的三维扫描点阵数据,然后使用激光输出装置和其上设置的激光测距仪测量激光发射头距离待去污工件的距离,并由控制器控制机器人对激光输出装置的位置进行调整,使得激光输出装置能够保持在最佳的去污效果位置上,从而实现高效率、高精度、高可靠的去污效果。
36.本技术还提供一种基于上述激光去污自动测距装置的运动轨迹自动规划控制方法,包括如下步骤:
37.s1、通过三维扫描装置获取待去污工件的三维形貌点阵数据,并以三维数据点阵输出,具体以空间直角坐标数据((x0,y0,z0) (x1,y1,z1)
···
(xn,yn,zn))进行输出;示教器在所选取的点阵数据中选取(x0,y0,z0)作为初始位置,(xn,yn,zn)为终点。
38.s2、根据步骤s1获取的点阵数据自动规划机器人的初始位置和运动轨迹,所述运动轨迹包括x、y轴平面运动轨迹以及z轴高度方向上的运动轨迹;设置机械臂的高度参数,该高度参数为激光测距仪与待去污工件表面之间的距离,此距离为激光的焦距f。具体的,根据点阵数据中x轴、y轴坐标点集作为平面运动轨迹,机器人根据所述激光测距仪的测量实时距离与高度参数对比,求得激光输出装置在实时运动过程中z轴方向需要上下移动的距离,得到z轴运动轨迹。具体的,所述激光输出装置与待去污工件表面的距离,即激光测距仪测定的实时距离为d1,机器人在运动过程中需要保持的高度参数为激光焦距f。
39.s3、根据步骤s2规划平面运动轨迹来设置激光信号的开启与关闭点,激光信号开启时,通过上述激光输出装置的激光进行自动去污;
40.s4、在进行步骤s3的去污过程中,所述机器人的控制器根据步骤 s2中所设置的高度参数、激光测距仪测得的实时距离来计算激光输出装置距离待去污工件表面之间的距离
与高度参数之间的差值,并在激光输出装置运动的同时自动进行高度补偿,完善z轴高度方向上的运动轨迹,其中所述实时距离为激光测距仪距离待去污面的实际距离d1,确保z轴的精度。
41.具体的,机器人在z轴的移动量为di=f-d;
42.当di》0时,即激光输出装置与待去污工件表面的实时距离小于激光光束焦距时,机器人通过上移距离d调节z轴高度,确保z轴高度保持在激光光束焦距高度f。
43.当di《0时,即激光输出装置与待去污工件表面的实时距离小于激光光束焦距时,机器人通过下移距离d调节z轴高度,确保z轴高度保持在激光光束焦距高度f。
44.当di=0时,即激光输出装置与待去污工件表面的实时距离等于激光光束焦距时,机器人不进行高度调节。
45.上述激光去污自动测距装置的运动轨迹自动规划控制方法,根据三维扫描装置得到的待去污工件表面扫描数据点阵,自动规划平面运动轨迹;同时在机器人运动过程中,激光测距仪与激光输出装置同时运动,实时反馈激光输出装置与待去污工件表面的距离,使激光输出装置与待去污工件表面的高度保持在激光焦距高度,保证z轴的精度,使得激光去污装置在面对不同形状的待去污工件时,都能可靠的规划运动轨迹,从而实现高效率、高精度、高可靠的去污效果,为激光清洗在核工业应用领域提供一种可行、可靠的技术方案。针对核工业废弃零部件工作面的放射性污染物去除及清洗装置针对不同待去污零部件的路径规划问题,相比于其他去污技术,自动程度高,适应性广,能够自动规划各种形状的工件激光清洗轨迹。
46.上述实施方式仅为本技术的优选实施方式,不能以此来限定本技术保护的范围,本领域的技术人员在本技术的基础上所做的任何非实质性的变化及替换均属于本技术所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1