一种蓝藻深井处理装置及其处理方法与流程
1.本发明涉及蓝藻治理技术领域,具体为一种蓝藻深井处理装置及其处理方法。
背景技术:
2.蓝藻又名蓝绿藻,是一类进化历史悠久、革兰氏染色阴性、无鞭毛、含叶绿素a,但不含叶绿体、能进行产氧性光合作用的大型单细胞原核生物,在一些营养丰富的水体中,有些蓝藻常于夏季大量繁殖,并在水面形成一层蓝绿色而有腥臭味的浮沫,称为“水华”,大规模的蓝藻暴发,被称为“绿潮”(和海洋发生的赤潮对应),绿潮引起水质恶化,严重时耗尽水中氧气而造成鱼类的死亡,更为严重的是,蓝藻中有些种类(如微囊藻)还会产生微囊藻毒素(简称mcs),大约50%的绿潮中含有大量mcs。mcs除了直接对鱼类、人畜产生毒害之外,也是肝癌的重要诱因,所以蓝藻的治理尤为重要;
3.目前在治理蓝藻时最高效环保的方法就是蓝藻深井,通过负压将蓝藻吸入高压深井内,通过水压使蓝藻的细胞壁破裂,最终蓝藻就会自然死亡,蓝藻细胞内存在伪气泡,伪气泡内含有气体,可以为细胞提供浮力,每当夜晚降临,蓝藻呼吸作用就会将细胞内积累的糖类转为密度较低的蛋白质,这时蓝藻细胞的密度降低,蓝藻就会上浮至水面上,一直到太阳出现时,蓝藻多余的光合产物就会以淀粉的形式累计,这时细胞内糖类的占细胞干重的比例就会提升,在糖类累计的过程中,细胞的密度就会增加,这时蓝藻细胞将会下沉,这就代表在白天时蓝藻细胞会下沉至水下,而在夜晚蓝藻细胞则会漂浮在水面上,并且光照强度越高蓝藻下沉的深度就越大。
4.但是传统的蓝藻深井顶部高度与湖面的高度都是固定都是无法自由调节的,如果想增加或降低深井的高度就必须安装增高环或者取下增高环,调节起来非常的麻烦,所以传统的蓝藻深井并不能实时跟随光照强度来调整顶部高度,这样在白天光照强度较高的时候,由于蓝藻细胞的下沉,而蓝藻深井只能对湖面的蓝藻进行收集,使得蓝藻深井吸入的湖水中蓝藻的占比非常低,严重影响了蓝藻深井处理蓝藻的效率。
5.基于此,本发明设计了一种蓝藻深井处理装置及其处理方法,以解决上述问题。
技术实现要素:
6.本发明的目的在于提供一种蓝藻深井处理装置及其处理方法,以解决上述背景技术中提出了现有技术缺点的问题。
7.为实现上述目的,本发明提供如下技术方案:一种蓝藻深井处理装置,包括井体、固定部、活动部、用于转动固定部的转动组件和用于转动活动部的调节组件,所述固定部的圆周面圆周阵列开设有四个进水槽,所述进水槽连通固定部的内腔,所述活动部的圆周面圆周阵列开设有四个进水口,所述进水口连通活动部的内腔,所述进水槽的上端和下端左右错位,所述活动部转动安装在固定部的圆周面上侧,所述固定部转动安装在井体的上端,转动组件用于控制固定部在井体上转动,而调节组件用于控制活动部相对固定部转动;
8.作为本发明的进一步方案,所述调节组件包括调节斜槽和调节滑块,所述固定部
的圆周面竖向滑动安装有升降环,所述升降环的上表面固定安装有安装臂,所述调节滑块固定安装在安装臂朝向活动部的一侧,所述活动部的圆周面下侧开设有调节斜槽,所述调节滑块滑动安装在调节斜槽中,所述井体的圆周面固定安装有用于控制升降环升降的第一推杆;
9.作为本发明的进一步方案,所述固定部的圆周面下侧固定安装有限位块,所述升降环开设有连通上下表面的限位槽,所述限位槽用于与限位块滑动配合;
10.作为本发明的进一步方案,所述固定部的上表面固定安装有凸环,所述固定部圆周面下侧也固定安装有凸环,所述活动部转动安装在上下两个凸环之间;
11.作为本发明的进一步方案,所述第一推杆的输出轴上端固定安装有安装块,所述安装块靠近升降环一端的上侧转动安装有接触滚轮,所述接触滚轮与升降环的下表面接触;
12.作为本发明的进一步方案,所述活动部的圆周面活动安装有增高圈,所述增高圈的圆周面下侧固定安装有支撑架,所述井体圆周面上侧固定安装有用于控制增高圈升降的第二推杆,所述第二推杆的输出轴与支撑架的下表面固定连接;
13.作为本发明的进一步方案,进水槽最右侧到其右侧相邻的进水槽左侧之间的距离等于进水口的左右宽度;
14.作为本发明的进一步方案,所述转动组件包括转动槽、转动环、旋转齿圈和与旋转齿圈啮合的旋转蜗杆,所述井体的上表面开设有转动槽,所述转动环固定安装在固定部的下表面,所述固定部通过转动环与井体上表面开设的转动槽转动配合,所述固定部的圆周面最下侧固定安装有旋转齿圈,所述井体的圆周面上侧固定安装有用于安装旋转蜗杆的支架,所述旋转蜗杆转动安装在两个支架之间,所述井体圆周面上侧固定安装有驱动电机,驱动电机输出轴与旋转蜗杆之间通过链条传动;
15.作为本发明的进一步方案,一种蓝藻的深井处理方法,该方法的具体步骤如下:
16.步骤一:夜晚时,增高圈的高度下降,增高圈的上表面高度与固定部上表面高度相同,然后湖水会直接从增高圈以及固定部的上端进入,最后进入井体内;
17.步骤二:等待太阳升起时,通过光线传感器对太阳光的强度进行检测,当太阳光的光照强度超过光合作用与呼吸作用的平衡点时,第二推杆会启动将增高圈向上升起,增高圈的上表面就会从湖面上升起,这时湖水将无法从增高圈以及固定部的上方进入井体内;
18.步骤三:第一推杆控制升降环上升,根据光线传感器检测的太阳光强度来控制升降环的升起高度,升降环升起时活动部就会发生转动,进水口与进水槽就会慢慢重叠,湖水就可以从进水口与进水槽重叠的部分进入井体内,当光照强度越大时,升降环的升起高度越高,而活动部相对固定部旋转的角度就会越大,进水口与进水槽重叠部分的高度就会越低,这样就可以对更深处的湖水进行收集;
19.步骤四:驱动电机启动带动旋转蜗杆转动,旋转蜗杆转动就会驱动旋转齿圈转动,旋转齿圈就会带动固定部以及活动部同步转动;
20.步骤五:当太阳光照消失后,驱动电机停止,第一推杆和第二推杆会恢复至初始位置,湖水又开始从增高环以及固定部的顶部进入井体内。
21.与现有技术相比,本发明的有益效果是:
22.1.本装置通过将活动部转动安装在固定部的外侧,然后在固定臂圆周面开设进水
槽,活动部的圆周面开设进水口,进水槽左右倾斜,而进水口竖直朝下,这样活动部转动就可以使进水口与进水槽的不同位置重合,进水口与进水槽不同位置重合时重合位置的高度也就会不同,这样我们就能通过控制活动部旋转来控制进水口与进水槽重叠位置的高度,湖水只能从进水口与进水槽的重叠部分进入固定部内,这样就能达到收集不同深度湖水的效果,使进水口与进水槽重叠位置的高度始终与蓝藻在湖水中所处的高度靠近,不会出现较大的偏差,保证进入井体内部的湖水中蓝藻含量,保证了蓝藻深井处理蓝藻的效率,降低了处理蓝藻的时间;
23.2.通过旋转组件控制固定部转动,在固定部转动时活动部也会与固定部同步转动,增加收集湖水的范围,保证通过进水口与进水槽配合处理蓝藻的全面性,防止出现局部蓝藻无法收集的情况,通过在活动部的外侧竖向滑动安装增高圈,增高圈可以在白天时上升至湖面上,防止湖水从固定部的顶部进入固定部内,而到了夜晚时,增高圈就会下降,使湖水可以从固定部的顶部进入井体内,根据不同的时间来采用不同的湖水收集方法,保证湖水收集的精确性以及收集效率。
附图说明
24.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
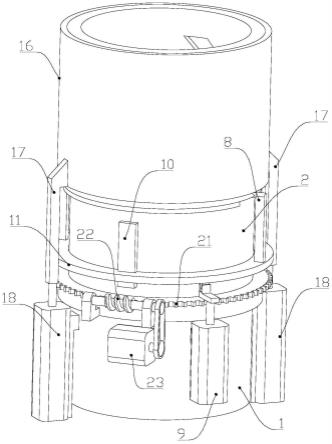
25.图1为本发明总体结构示意图;
26.图2为本发明去除增高圈后的结构示意图;
27.图3为本发明活动部与固定部分离结构示意图;
28.图4为本发明中接触滚轮与升降环的配合结构示意图;
29.图5为本发明中固定部、活动部以及增高圈的剖面结构示意图;
30.图6为本发明中井体以及固定部的剖面结构示意图;
31.图7本发明的方法流程图。
32.附图中,各标号所代表的部件列表如下:
33.1-井体、2-固定部、3-活动部、4-进水槽、5-进水口、6-调节斜槽、7-调节滑块、8-安装臂、9-第一推杆、10-限位块、11-升降环、12-限位槽、13-凸环、14-安装块、15-接触滚轮、16-增高圈、17-支撑架、18-第二推杆、19-转动槽、20-转动环、21-旋转齿圈、22-旋转蜗杆、23-驱动电机。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
35.请参阅图1-7,本发明提供一种技术方案:一种蓝藻深井处理装置,包括井体1、固定部2、活动部3、用于转动固定部2的转动组件和用于转动活动部3的调节组件,其特征在
于:固定部2的圆周面圆周阵列开设有四个进水槽4,进水槽4连通固定部2的内腔,活动部3的圆周面圆周阵列开设有四个进水口5,进水口5连通活动部3的内腔,进水槽4的上端和下端左右错位,活动部3转动安装在固定部2的圆周面上侧,固定部2转动安装在井体1的上端,转动组件用于控制固定部2在井体1上转动,而调节组件用于控制活动部3相对固定部2转动;
36.工作时,传统的蓝藻深井顶部高度都是无法自由调节的,如果想增加或降低深井的高度就必须安装增高环或者取下增高环,调节起来非常的麻烦,所以传统的蓝藻深井并不能实时跟随光照强度来调整顶部高度,这样在白天光照强度较高的时候,由于蓝藻细胞的下沉,蓝藻深井吸入的湖水中蓝藻的占比非常低,严重影响了蓝藻深井处理蓝藻的效率,如图6所示,本装置通过在井体1的上端转动安装固定部2,如图2所示,然后在固定部2的外侧转动安装活动部3,如图3所示,固定部2开设进水槽4,而活动部3开设进水口5,然后通过调节组件来控制活动部3相对固定部2进行转动,通过进水槽4的特殊形状,使得进水口5在与进水槽4不同位置重合时高度都不相同,并且除了进水口5与进水槽4重合的部分,湖水无法从进水口5与进水槽4其余不重合的部分进入固定部2内,这样在安装时,使活动部3以及固定部2的上表面超出湖面,然后湖水就无法从固定部2的顶部进入井体1内,当我们需要收集不同深度的湖水时,就可以通过调节组件控制活动部3旋转来改变进水口5与进水槽4重合的位置,以此来收集不同深度的湖水,为什么不直接通过深井顶部的升降来实现吸收不同深度的湖水,是因为在深井顶部高度下降时,从湖面到深井顶部位置的湖水都可以进入深井内,这样就不能达到精准的收集特定深度的湖水,在整体装置功率不变的情况下,还会降低湖水向深井聚积的速度,在实际使用过程中,可以通过光线传感器来控制调节组件,光线传感器可以实时监测太阳光的强度,以此来作为调节组件控制活动部3旋转的参数,使进水口5与进水槽4重叠位置可以根据太阳光强度实时变化,使进水口5与进水槽4重叠位置的高度始终与蓝藻在湖水中所处的高度靠近,不会出现较大的偏差,保证进入井体1内部的湖水中蓝藻含量,增加了蓝藻深井处理蓝藻的效率,转动组件可以驱动固定部2进行转动,而固定部2转动时会带动活动部3同步转动,由于进水口5与进水槽4重叠部分的面积较小,所以在吸入湖水时只能做到吸入一定范围内的湖水,通过固定部2以及活动部3的旋转就可以增加收集湖水的范围,保证蓝藻深井处理蓝藻的全面性,防止出现局部蓝藻堆积的情况;
37.本装置通过将活动部3转动安装在固定部2的外侧,然后在固定臂圆周面开设进水槽4,活动部3的圆周面开设进水口5,进水槽4左右倾斜,而进水口5竖直朝下,这样活动部3转动就可以使进水口5与进水槽4的不同位置重合,进水口5与进水槽4不同位置重合时重合位置的高度也就会不同,这样我们就能通过控制活动部3旋转来控制进水口5与进水槽4重叠位置的高度,湖水只能从进水口5与进水槽4的重叠部分进入固定部2内,这样就能达到收集不同深度湖水的效果,使进水口5与进水槽4重叠位置的高度始终与蓝藻在湖水中所处的高度靠近,不会出现较大的偏差,保证进入井体1内部的湖水中蓝藻含量,增加了蓝藻深井处理蓝藻的效率,同时通过旋转组件控制固定部2转动,在固定部2转动时活动部3也会与固定部2同步转动,增加收集湖水的范围,保证蓝藻深井处理蓝藻的全面性,防止出现局部蓝藻无法收集的情况。
38.作为本发明的进一步方案,调节组件包括调节斜槽6和调节滑块7,固定部2的圆周面竖向滑动安装有升降环11,升降环11的上表面固定安装有安装臂8,调节滑块7固定安装
在安装臂8朝向活动部3的一侧,活动部3的圆周面下侧开设有调节斜槽6,调节滑块7滑动安装在调节斜槽6中,井体1的圆周面固定安装有用于控制升降环11升降的第一推杆9,固定部2的圆周面下侧固定安装有限位块10,升降环11开设有连通上下表面的限位槽12,限位槽12用于与限位块10滑动配合;
39.工作时,如图2所示,当需要活动部3单独转动时,只需要通过第一推杆9将升降环11向上顶起,升降环11上升时就会带动调节滑块7上升,由于调节滑块7滑动安装在调节斜槽6内,在调节滑块7上升时就会带动活动部3发生转动,升降环11上升的幅度越大,活动部3转动的幅度也就越大,为了保证在固定部2转动时活动部3可以跟随固定部2同步转动,在固定部2的圆周面开设限位块10,升降环11通过限位槽12与限位块10滑动配合,这样升降环11就只能在固定部2的圆周面上下滑动,固定部2在转动时就会带动升降环11同步转动,而升降环11就会通过调节滑块7带动活动部3同步转动,实现固定部2转动时活动部3与固定部2同步转动,保证进水口5与进水槽4的重合位置不会出现偏移,并且在固定部2、升降环11和活动部3同步转动的过程中,只需要通过第一推杆9调节升降环11的高度,也能实现进水口5与进水槽4重合位置的调节,实现在固定部2和活动部3转动的过程中调节进水口5与进水槽4重合位置的效果。
40.作为本发明的进一步方案,固定部2的上表面固定安装有凸环13,固定部2圆周面下侧也固定安装有凸环13,活动部3转动安装在上下两个凸环13之间;
41.工作时,如图2-4所示,固定部2转动时是通过升降环11以及调节滑块7间接带动活动部3进行转动,由于调节滑块7滑动安装在调节斜槽6中,所以在固定部2通过调节滑块7带动活动部3转动时,调节滑块7会施加给活动部3一个向上或者向下的力,如果不将活动不的高度进行固定就会使得活动部3发生竖直方向上的位置,所以我们在固定部2的顶部安装凸环13,固定部2的圆周面下侧安装凸环13,然后将活动部3转动安装在上下两个凸环13之间,这样就可以防止活动部3发生竖直方向上的位移。
42.作为本发明的进一步方案,第一推杆9的输出轴上端固定安装有安装块14,安装块14靠近升降环11一端的上侧转动安装有接触滚轮15,接触滚轮15与升降环11的下表面接触;
43.工作时,在固定部2带动升降环11转动时,第一推杆9并不会跟随固定部2同步转动,所以第一推杆9输出轴顶部与升降环11下表面之间就会发生相对滑动,为了降低升降环11与第一推杆9的磨损,如图4所示,在第一推杆9顶部通过安装块14安装接触滚轮15,通过接触滚轮15与升降环11的下表面进行接触,这样就可以将第一推杆9与升降环11的滑动摩擦力转化为接触滚轮15与升降环11的滚动摩擦力,降低升降环11与第一推杆9的磨损,由于升降环11只有第二推杆18向上的支撑力,所以固定环在通过升降环11带动活动环转动时需要控制转动的方向,防止调节斜槽6将调节滑块7以及升降环11向上带起。
44.作为本发明的进一步方案,活动部3的圆周面活动安装有增高圈16,增高圈16的圆周面下侧固定安装有支撑架17,井体1圆周面上侧固定安装有用于控制增高圈16升降的第二推杆18,第二推杆18的输出轴与支撑架17的下表面固定连接;
45.工作时,在夜晚没有太阳光时,95%的蓝藻会直接漂浮在水面上,由于夜晚并不会像白天一样会出现光照强度的变化,所以整个夜晚蓝藻都是漂浮在水面上不会出现高度变化,仅仅通过进水口5与进水槽4的重合部分进行进水,整体装置进水的效率不会太高,如图
5所示,所以在活动部3的外侧竖向滑动安装增高圈16,如图1所示,增高圈16的高度通过第二推杆18进行控制,在白天需要收集不同高度的湖水时,增高圈16就可以上升超过湖面,这样增高圈16就可以防止湖水从固定部2的顶部进入固定部2内,这样固定部2在安装时就可以不用超出水面,但是到了晚上时,由于蓝藻上浮至水面上,增高圈16就会下降,湖水就可以从固定部2的顶部进入,保证在夜晚的收集效率,同时可以升降的增高圈16还可以在湖面水位增高时保证深井不被完全淹没,在雨水季节水位增加时整体装置也能使用,增加整体装置的适用性。
46.作为本发明的进一步方案,进水槽4最右侧到其右侧相邻的进水槽4左侧之间的距离等于进水口5的左右宽度;
47.工作时,如图3所示,在雨水季节湖面水位增高时,在夜晚需要对湖面的蓝藻进行收集,由于固定部2高度无法调节,就需要增高圈16向上升起,这时进水口5与进水槽4就会显露出来,所以相邻进水槽4之间的距离需要等于进水口5的左右宽度,这样进水口5就可以转动至相邻的两个进水槽4之间,这样进水口5与进水槽4就不会有重合的部分,防止在对湖面的蓝藻进行收集时影响湖水收集的效率。
48.作为本发明的进一步方案,转动组件包括转动槽19、转动环20、旋转齿圈21和与旋转齿圈21啮合的旋转蜗杆22,井体1的上表面开设有转动槽19,转动环20固定安装在固定部2的下表面,固定部2通过转动环20与井体1上表面开设的转动槽19转动配合,固定部2的圆周面最下侧固定安装有旋转齿圈21,井体1的圆周面上侧固定安装有用于安装旋转蜗杆22的支架,旋转蜗杆22转动安装在两个支架之间,井体1圆周面上侧固定安装有驱动电机23,驱动电机23输出轴与旋转蜗杆22之间通过链条传动;
49.工作时,如图1所示,驱动电机23通过链条带动调节蜗杆转动,调节蜗杆转动时就会驱动调节齿圈转动,然后带动固定部2进行转动,同时通过调节蜗杆与调节齿圈之间的自锁性对固定部2进行锁定,保证固定部2不会自己发生转动。
50.作为本发明的进一步方案,一种蓝藻的深井处理方法,该方法的具体步骤如下:
51.步骤一:夜晚时,增高圈16的高度下降,增高圈16的上表面高度与固定部2上表面高度相同,然后湖水会直接从增高圈16以及固定部2的上端进入,最后进入井体1内;
52.步骤二:等待太阳升起时,通过光线传感器对太阳光的强度进行检测,当太阳光的光照强度超过光合作用与呼吸作用的平衡点时,第二推杆18会启动将增高圈16向上升起,增高圈16的上表面就会从湖面上升起,这时湖水将无法从增高圈16以及固定部2的上方进入井体1内;
53.步骤三:第一推杆9控制升降环11上升,根据光线传感器检测的太阳光强度来控制升降环11的升起高度,升降环11升起时活动部3就会发生转动,进水口5与进水槽4就会慢慢重叠,湖水就可以从进水口5与进水槽4重叠的部分进入井体1内,当光照强度越大时,升降环11的升起高度越高,而活动部3相对固定部2旋转的角度就会越大,进水口5与进水槽4重叠部分的高度就会越低,这样就可以对更深处的湖水进行收集;
54.步骤四:驱动电机23启动带动旋转蜗杆22转动,旋转蜗杆22转动就会驱动旋转齿圈21转动,旋转齿圈21就会带动固定部2以及活动部3同步转动;
55.步骤五:当太阳光照消失后,驱动电机23停止,第一推杆9和第二推杆18会恢复至初始位置,湖水又开始从增高环以及固定部2的顶部进入井体1内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1