一种高效清洁的小管径清淤机器人的制作方法
1.本发明涉及管道清淤领域,具体为一种高效清洁的小管径清淤机器人。
背景技术:
2.城市地下排水管道是水污染防治和排涝、防洪的基础设施,排水管网由于长时间的运行,管道很容易发生堵塞状况,因此,需要对管道进行定期清理;目前,随着管道清理领域技术的发展,机器人清洗已经逐渐形成一种趋势,相对于人工清洗而言,更加方便、安全,效率更高;现有技术中,小管径清淤机器人在使用时,装置适用范围小,仅能适用于单一管径,同时,装置清淤效率低;因此,需要对现有技术进行改进。
3.为解决上述问题,经过检索,公告号为cn216108935u的专利公开一种小管径清淤机器人,文中提出“包括壳体,所述壳体上固定安装有电机,所述电机的转轴和壳体转动连接,所述转轴上焊接有螺杆,所述螺杆的外侧通过螺纹连接有锥形块,所述壳体内滑动套接有锥形块,所述壳体上接触有驱动箱,所述驱动箱上设置有车轮,所述驱动箱上焊接有方杆,”淤泥留在长管道内部,只能将管道内壁上附着的污泥进行刮下,无法将管内部的污泥进行排出。
4.鉴于此,针对上述问题深入研究,遂有本案产生。
技术实现要素:
5.本发明为了弥补市场空白,提供了一种高效清洁的小管径清淤机器人。
6.本发明的目的在于提供一种高效清洁的小管径清淤机器人,以解决上述背景技术中提出的问题。
7.为实现上述目的,本发明提供如下技术方案:一种高效清洁的小管径清淤机器人,包括:小管径管道,所述小管径管道内部设置有机器人装置,且机器人装置的底部两侧安装有履带行走装置,同时机器人装置前端安装有刮淤装置,并且机器人装置的后部安装有冲刷节电装置,机器人装置的底部右侧安装有排淤结构;刮淤装置,所述刮淤装置的连接柱一端与驱动电机的输出轴固定连接,且连接柱远离驱动电机的一端与安装管固定连接,同时安装管的上侧安装有上刮板,并且安装管的下侧安装有下刮板;冲刷节电装置,所述冲刷节电装置上的连通管通过“l”形支架安装在机器人装置的内部,且连通管的一端与进水管固定连接,同时连通管的另一端与转盘固定连接,并且转盘的外侧周向位置均匀安装有多组异形管,转盘的右侧表面均匀安装有四组反推管,反推管与异形管上均安装有高压喷嘴;排淤结构,所述排淤结构上的底部刮板与挡板固定连接,且挡板上安装有拖动柱,拖动柱远离挡板的一端与机器人装置固定连接。
8.进一步的,所述刮淤装置包括上刮板、调节柱、定位槽、固定螺栓、安装管、安装槽、
下刮板、连接柱和驱动电机,且驱动电机通过机座安装在机器人装置的内部。
9.进一步的,所述上刮板、下刮板与安装管的安装结构一致,且上刮板、下刮板分别与小管径管道内部上侧壁与下侧壁接触,上刮板、下刮板与安装管之间均为可拆卸结构。
10.进一步的,所述上刮板底部与调节柱固定连接,且上刮板与调节柱组合在一起构成“t”字形,同时调节柱的两侧均开设有定位槽,调节柱与安装槽的尺寸相适配,且调节柱插接在安装槽的内部。
11.进一步的,所述安装管的侧壁中开设有螺接孔,且固定螺栓上的螺柱穿过螺接孔设置在定位槽的内部,定位槽为条形设置,调节柱在安装管内部的位置通过两组固定螺栓进行固定限位。
12.进一步的,所述冲刷节电装置包括密封轴承、进水软管、进水管、连通管、转盘、反推管、异形管、高压喷嘴、十字形安装架和温度杆,且进水管的端部与进水软管固定连接。
13.进一步的,所述连通管右端通过密封轴承与转盘的侧壁活动连接,且连通管与转盘连通设置,同时连通管的内部安装有十字形安装架,十字形安装架上固定设置有温度杆,且温度杆远离十字形安装架的一侧与转盘内壁活动连接。
14.进一步的,所述异形管是由金属材质做成的“l”形结构,且相邻两组异形管之间的距离一致。
15.进一步的,所述反推管在转盘上倾斜设置,且反推管与转盘之间的夹角为136
°
。
16.进一步的,所述排淤结构包括拖动柱、倾斜面、底部刮板、挡板和开孔,且底部刮板和挡板组合在一起构成“l”形,同时底部刮板远离挡板的一端设置有倾斜面,挡板上开设有开孔,开孔设置在反推管的下方位置,开孔内部穿插有进水软管。
17.与现有技术相比,本发明的有益效果是:1.启动驱动电机的开关,驱动电机的输出轴带动连接柱、安装管转动,安装管带动其上的上刮板、下刮板转动,对附着在小管径管道内壁上的淤泥进行刮除工作;2.上刮板底部与调节柱固定连接,调节柱插接在安装槽的内部,上刮板与下刮板的高度可进行调节工作,便于对不同管径的小管径管道进行淤泥挂除工作;3.水流通过进水软管、进水管、连通管进入到转盘的内部,并通过反推管上的高压喷嘴进行喷出,水流喷射在小管径管道的内壁上,在作用力与反作用力的情况下,实现对机器人装置进行推动工作,降低履带行走装置所损耗的电能;4.机器人装置在移动的时候,通过三组拖动柱带动底部刮板、挡板进行移动,底部刮板、挡板可对污泥进行收集并带动污泥进行移动,当机器人装置移出小管径管道内部的时候,底部刮板、挡板可将小管径管道内部聚集的污泥进行大部分的排出工作。
附图说明
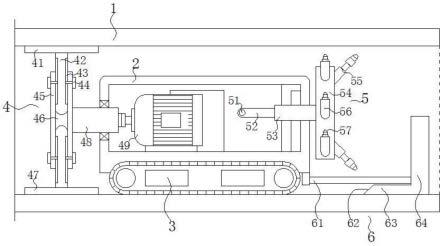
18.图1为本发明结构的正视示意图;图2为本发明结构的刮淤装置剖面示意图;图3为本发明结构的转盘的侧视图;图4为本发明结构的连通管、转盘连接结构示意图;图5为本发明结构的图1的剖面示意图;图6为本发明结构的小管径管道、挡板剖面示意图;
图7为本发明结构的本装置工作流程示意图。
19.图中:1、小管径管道;2、机器人装置;3、履带行走装置;4、刮淤装置;41、上刮板;42、调节柱;43、定位槽;44、固定螺栓;45、安装管;46、安装槽;47、下刮板;48、连接柱;49、驱动电机;5、冲刷节电装置;50、密封轴承;51、进水软管;52、进水管;53、连通管;54、转盘;55、反推管;56、异形管;57、高压喷嘴;58、十字形安装架;59、稳定杆;6、排淤结构;61、拖动柱;62、倾斜面;63、底部刮板;64、挡板;65、开孔。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.具体实施方式一:请参阅图1-7,本发明提供一种技术方案:一种高效清洁的小管径清淤机器人,包括:小管径管道1、刮淤装置4、冲刷节电装置5和排淤结构6;小管径管道1内部设置有机器人装置2,且机器人装置2的底部两侧安装有履带行走装置3,同时机器人装置2前端安装有刮淤装置4,并且机器人装置2的后部安装有冲刷节电装置5,机器人装置2的底部右侧安装有排淤结构6;刮淤装置4的连接柱48一端与驱动电机49的输出轴固定连接,且连接柱48远离驱动电机49的一端与安装管45固定连接,同时安装管45的上侧安装有上刮板41,并且安装管45的下侧安装有下刮板47;冲刷节电装置5上的连通管53通过“l”形支架安装在机器人装置2的内部,且连通管53的一端与进水管52固定连接,同时连通管53的另一端与转盘54固定连接,并且转盘54的外侧周向位置均匀安装有多组异形管56,转盘54的右侧表面均匀安装有四组反推管55,反推管55与异形管56上均安装有高压喷嘴57;排淤结构6上的底部刮板63与挡板64固定连接,且挡板64上安装有拖动柱61,拖动柱61远离挡板64的一端与机器人装置2固定连接。
22.机器人装置2通过履带行走装置3在小管径管道1内部移动的时候,通过刮淤装置4的设置,可将附着在小管径管道1内壁上的淤泥进行刮除,同时在冲刷节电装置5的作用下,高压水流边转动,边冲击在小管径管道1的内壁上,对小管径管道1内壁进行冲刷工作,并在排淤结构6的作用下,将掉落在小管径管道1内部下侧的淤泥进行收集,并随着机器人装置2的移动,将小管径管道1内部中的淤泥进行排查管外。
23.具体实施方式二:本实施方式为具体实施方式一的进一步限定,刮淤装置4包括上刮板41、调节柱42、定位槽43、固定螺栓44、安装管45、安装槽46、下刮板47、连接柱48和驱动电机49,且驱动电机49通过机座安装在机器人装置2的内部。
24.如图1所示:刮淤装置4的工作方式为:启动驱动电机49的开关,驱动电机49的输出轴带动连接柱48、安装管45转动,安装管45带动其上的上刮板41、下刮板47转动,对附着在小管径管道1内壁上的淤泥进行刮除工作。
25.具体实施方式三:本实施方式为具体实施方式二的进一步限定,上刮板41、下刮板
47与安装管45的安装结构一致,且上刮板41、下刮板47分别与小管径管道1内部上侧壁与下侧壁接触,上刮板41、下刮板47与安装管45之间均为可拆卸结构。
26.如图1-2所示:上刮板41、下刮板47分别与小管径管道1内部上侧壁与下侧壁接触,上刮板41、下刮板47在运动的时候,可将附着在小管径管道1内壁上的污泥进行刮除工作。
27.具体实施方式四:本实施方式为具体实施方式三的进一步限定,上刮板41底部与调节柱42固定连接,且上刮板41与调节柱42组合在一起构成“t”字形,同时调节柱42的两侧均开设有定位槽43,调节柱42与安装槽46的尺寸相适配,且调节柱42插接在安装槽46的内部。
28.如图1-2所示:上刮板41底部与调节柱42固定连接,调节柱42插接在安装槽46的内部,上刮板41与下刮板47的高度可进行调节工作,便于对不同管径的小管径管道1进行淤泥挂除工作。
29.具体实施方式五:本实施方式为具体实施方式三的进一步限定,安装管45的侧壁中开设有螺接孔,且固定螺栓44上的螺柱穿过螺接孔设置在定位槽43的内部,定位槽43为条形设置,调节柱42在安装管45内部的位置通过两组固定螺栓44进行固定限位。
30.如图1-2所示:在对上刮板41的高度进行调节的时候,转动固定螺栓44,使得固定螺栓44上的螺柱脱离定位槽43的内部,此时对上刮板41进行高度调节,调节完毕之后,拧紧固定螺栓44,使得固定螺栓44上的螺柱抵紧在定位槽43的内部,保证上刮板41在静止时候的稳定性。
31.具体实施方式六:本实施方式为具体实施方式一的进一步限定,冲刷节电装置5包括密封轴承50、进水软管51、进水管52、连通管53、转盘54、反推管55、异形管56、高压喷嘴57、十字形安装架58和稳定杆59,且进水管52的端部与进水软管51固定连接。
32.冲刷节电装置5的设置,可节省用于驱动履带行走装置3进行工作的电量,具体的工作方式如图1所示:水流通过进水软管51、进水管52、连通管53进入到转盘54的内部,并通过反推管55上的高压喷嘴57进行喷出,水流喷射在小管径管道1的内壁上,在作用力与反作用力的情况下,实现对机器人装置2进行推动工作,降低履带行走装置3所损耗的电能。
33.具体实施方式七:本实施方式为具体实施方式六的进一步限定,连通管53右端通过密封轴承50与转盘54的侧壁活动连接,且连通管53与转盘54连通设置,同时连通管53的内部安装有十字形安装架58,十字形安装架58上固定设置有稳定杆59,且稳定杆59远离十字形安装架58的一侧与转盘54内壁活动连接。
34.如图4所示:连通管53与转盘54之间通过密封轴承50进行密封活动连接,使得水流自连通管53进入到转盘54内部的时候,不会动连通管53与转盘54之间连接的缝隙中露出。
35.具体实施方式八:本实施方式为具体实施方式六的进一步限定,异形管56是由金属材质做成的“l”形结构,且相邻两组异形管56之间的距离一致。
36.如图1和图5所示:异形管56是由金属材质做成的“l”形结构,且相邻两组异形管56之间的距离一致,水流在转盘54的内部,并从异形管56上的高压喷嘴57中进行喷出,在作用力与反作用力的情况下,使得转盘54进行转动,可对小管径管道1的内壁进行均匀地冲刷工作。
37.具体实施方式九:本实施方式为具体实施方式六的进一步限定,反推管55在转盘54上倾斜设置,且反推管55与转盘54之间的夹角为136
°
。
38.如图1所示:反推管55在转盘54上倾斜设置,且反推管55与转盘54之间的夹角为136
°
,自反推管55上的高压喷嘴57喷出的高压水流冲击在小管径管道1的内壁上,可对机器人装置2进行推动工作。
39.具体实施方式十:本实施方式为具体实施方式一的进一步限定,排淤结构6包括拖动柱61、倾斜面62、底部刮板63、挡板64和开孔65,且底部刮板63和挡板64组合在一起构成“l”形,同时底部刮板63远离挡板64的一端设置有倾斜面62,挡板64上开设有开孔65,开孔65设置在反推管55的下方位置,开孔65内部穿插有进水软管51。
40.如图1-6所示:机器人装置2在移动的时候,通过三组拖动柱61带动底部刮板63、挡板64进行移动,底部刮板63、挡板64可对污泥进行收集并带动污泥进行移动,当机器人装置2移出小管径管道1内部的时候,底部刮板63、挡板64可将小管径管道1内部聚集的污泥进行大部分的排出工作;进水软管51插接在开孔65的内部,可对进水软管51进行限位,避免异形管56、反推管55在转动的时候,与进水软管51发生运动干涉。
41.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1