一种钢丝绳除污润滑一体化机器人
1.本发明涉及一种钢丝绳除污装置,尤其涉及一种钢丝绳除污润滑一体化机器人,具体适用于可以保护投影仪不受灰尘和异物侵蚀的实训装置。
背景技术:
2.三峡升船机平衡重系统作为升船机平衡船厢重量的关键设备,提高平衡重系统运行的安全可靠性对三峡升船机的运行安全有着重要的意义。
3.三峡升船机平衡重钢丝绳由256根直径为74mm、长度为150m的双层多股抗扭钢丝绳组成,顶部滑轮直径为5m,在服役时经过滑轮数目相对较多、承受反向弯曲几率相对较大、运行速度相对较快、承载冲击载荷相对较大,磨损和疲劳是其主要失效形式,而且在使用过程中,表面易粘上油泥和灰尘等,给使用带来不便,也对作业现场环境造成污染,如果粘上的污物中含有腐蚀介质不能及时清除时,还会对钢丝绳造成损坏,缩短钢丝绳的使用寿命,影响生产安全;平衡重系统具有运行环境复杂、维护条件差、钢丝绳长度大、数量多和损坏后更换难度大等特点,对平衡重钢丝绳进行良好的除污和润滑保护是确保三峡升船机平衡重系统安全运行的关键,开展三峡升船机平衡重钢丝绳运维技术研究,确保升船机长期稳定高效运行,对提高三峡枢纽通航过坝能力具有重要意义。本发明提出的一种钢丝绳除污润滑一体化机器人可提高升船机运行的稳定性、持久性及经济性,对保障升船机的安全运行、充分发挥其航运效益具有重要意义,其经济效益和社会效益巨大。
4.目前,钢丝绳的清洁保养还大多依靠人工手动操作,通过刮刀、钢丝刷等去除钢丝绳各子绳之间的污物,再通过润滑脂泵加注润滑脂。这种方式虽然不需要特殊设备即可完成钢丝绳除污润滑工作,但其仍存在以下缺陷:1、升船机平衡重系统包括多根重型钢丝绳,安装拆卸难度大、工时长,一般在服役状态下进行维护,但升船机钢丝绳运行速度相对较快,人工操作工作效率难以跟上,无法达到清洁效果。
5.2、钢丝绳数量多、长度长,人工操作清理费力、效果差。
技术实现要素:
6.本发明的目的是克服现有技术中存在的投影仪长期暴露在外受灰尘和异物侵蚀的问题,提供了一种可以保护投影仪不受灰尘和异物侵蚀的实训装置。
7.为实现以上目的,本发明的技术解决方案是:一种钢丝绳除污润滑一体化机器人,所述机器人包括:车身、动力机构、除污润滑装置和控制器;所述车身两侧各设置有两个行走轮,所述动力机构固定设置于车身内,所述动力机构的动力输出轴通过齿轮组与各个行走轮传动配合,所述除污润滑装置布置在车身外部,所述除污润滑装置包括镜像对称的第一半套筒和第二半套筒,所述第一半套筒和第二半套筒共同组成管状结构的刷筒,钢丝绳穿过刷筒后与刷筒的内壁压紧配合,所述第一
半套筒和第二半套筒均通过机械臂与车身旋转配合,所述第一半套筒的侧部通过润滑脂管与润滑脂泵的出液口相连通,所述控制器固定设置于车身内部;所述动力机构的行驶信号输入端与控制器的行驶信号输出端相连接,所述升降机构的升降信号输入端与控制器的升降信号输出端相连接。
8.所述机器人还包括污泥收集托盘,所述污泥收集托盘设置于除污润滑装置的正下方,所述污泥收集托盘包括托盘、托盘壁、钢丝绳管和污泥袋安装管,所述托盘为底面倾斜的盘状结构,所述托盘通过连接臂与车身的底板固定连接,所述托盘外圆周的顶部固定设置有管状结构的托盘壁,所述托盘的中部固定设置有钢丝绳管,所述钢丝绳管为中空的管状结构,所述钢丝绳管穿过托盘的底板后与托盘连接为一体,所述污泥袋安装管固定设置于托盘的底部,所述污泥袋安装管穿过托盘的底板后与托盘连接为一体。
9.所述托盘、托盘壁、钢丝绳管和污泥袋安装管均包括镜像对称的两个组合部,所述托盘的两个组合部各通过一个连接臂与车身的底板旋转配合,所述托盘两个组合部的连接处各设置有一个卡口,所述托盘的两个组合部通过其上设置的卡口互相连接,所述托盘、托盘壁、钢丝绳管和污泥袋安装管的两个组合部共同形成完整的污泥收集托盘。
10.所述除污润滑装置包括镜像对称的第一半套筒和第二半套筒,所述第一半套筒和第二半套筒共同组成管状结构的刷筒,所述第一半套筒和第二半套筒的顶部和底部各固定设置有一个机械臂,所述第一半套筒和第二半套筒均通过其上设置的机械臂与齿轮盒旋转配合,所述第一半套筒和第二半套筒的内侧开设有凹槽,所述第一半套筒和第二半套筒共同组成刷筒后其内部的凹槽由上至下依次形成上增压腔、润滑脂加注腔、下增压腔和刮刀腔,所述上增压腔、润滑脂加注腔、下增压腔和刮刀腔依次由上至下设置于刷筒内,所述上增压腔、润滑脂加注腔、下增压腔和刮刀腔之间依次互相连通,所述上增压腔和下增压腔的侧部均开设有一个空气入口,两个空气入口上均固定设置有压缩空气管,所述上增压腔和下增压腔均通过其上设置的压缩空气管与压缩机的出气口相连通,所述压缩机固定设置于升降机构的正上方,所述润滑脂加注腔的顶部和底部开设有润滑脂孔,所述润滑脂孔上固定设置有润滑脂管,所述润滑脂加注腔通过其上设置的润滑脂管与润滑脂泵的出液口相连通,所述润滑脂泵的进液口与润滑脂箱的底部相连通,所述润滑脂泵和润滑脂箱均固定设置于动力机构的顶部,所述润滑脂箱的后部设置有润滑脂加注口,所述润滑脂加注腔的内侧固定设置有可拆卸的螺旋线板,所述螺旋线板上均匀设置有螺旋线,所述螺旋线与钢丝绳上各股子绳之间的缝隙对应设置,所述刮刀腔内设置有可拆卸的旋转刮刀,所述旋转刮刀与除污润滑装置旋转配合,所述旋转刮刀的中部开设有可容纳钢丝绳的异形孔,所述异形孔内均匀固定有多个与钢丝绳上各股子绳之间的缝隙对应设置的除污刀口。
11.所述齿轮盒内设置有开合电机,所述开合电机的动力输出轴与各个机械臂传动配合,所述开合电机用于驱动第一半套筒和第二半套筒张开或合拢,所述开合电机的开合信号输入端与控制器的开合信号输出端相连接。
12.所述旋转刮刀包括镜像对称的两个半环形刮刀和两个角度开关,两个半环形刮刀共同组成环形结构的刮刀,两个半环形刮刀的内圆周上均固定设置有多个与钢丝绳上的各股子绳对应设置的除污刀口,两个角度开关分别设置于两个半环形刮刀的两个连接口处,两个角度开关的触杆均与第一半套筒和第二半套筒传动配合,两个半环形刮刀与第一半套筒和第二半套筒之间设置有加热模组,两个角度开关的角度信号输出端与控制器的限位信
号输入端相连接,所述加热模组的加热信号输入端与控制器的加热信号输出端相连接。
13.所述机器人还包括升降机构,所述升降机构包括升降电机、蜗杆和升降臂,所述升降电机固定设置于车身前侧的底板上,所述升降电机的近车头侧固定设置有蜗杆安装仓,所述蜗杆安装仓为长方体结构,所述蜗杆安装仓顶板的底部固定设置有端面轴承,所述端面轴承的正下方设置有蜗杆安装板,所述蜗杆安装板的顶部固定设置有另一个端面轴承,所述蜗杆沿竖直方向设置于两个端面轴承之间,所述蜗杆的顶部和底部均与其对应侧的端面轴承旋转配合,所述蜗杆的底部固定设置有升降齿轮,所述蜗杆通过升降齿轮与升降电机传动配合,所述升降臂的一端开设有与蜗杆相配合的螺旋孔,所述蜗杆穿过螺旋孔后与升降臂传动配合,当蜗杆旋转时,升降臂根据旋转方向在蜗杆上升降,所述升降臂的另一端与齿轮盒固定连接,所述升降电机的升降信号输入端与控制器的升降信号输出端相连接。
14.所述齿轮盒的近车身侧固定设置有滑轨,所述车身顶板的前端固定设置有滑块,所述滑块的顶部固定设置有滑轨固定电机,所述齿轮盒通过其上设置的滑轨与滑块滑动配合,所述滑轨固定电机通过动力输出轴上设置的夹爪与滑轨限位配合,所述滑轨固定电机的限位信号输入端与控制器的限位信号输出端相连接。
15.所述机器人还包括电瓶和无线模块,机器人内部各用电设备均通过电瓶供电,所述无线模块的无线信号输出端与控制器的线信号输入端相连接。
16.与现有技术相比,本发明的有益效果为:1、本发明一种钢丝绳除污润滑一体化机器人中除污润滑装置设置在车身上,车身两侧各设置有两个行走轮,各行走轮均通过固定设置于车身内的动力机构驱动,使得本设计可以根据需求移动,同时除污润滑装置包括镜像对称的第一半套筒和第二半套筒,第一半套筒和第二半套筒共同组成管状结构的刷筒,第一半套筒和第二半套筒可以通过开合夹住钢丝绳,第一半套筒和第二半套筒夹住钢丝绳后,钢丝绳与刷筒内壁压紧配合。因此,本设计可以根据需求移动到工作位置,同时第一半套筒和第二半套筒为可开合设计,可以在钢丝绳服役状态下进行维护,有效提高系统使用便利度。
17.2、本发明一种钢丝绳除污润滑一体化机器人中第一半套筒和第二半套筒的内侧开设有凹槽,第一半套筒和第二半套筒共同组成刷筒后其内部的凹槽由上至下依次形成上增压腔、润滑脂加注腔、下增压腔和刮刀腔,上增压腔和下增压腔侧部通过压缩空气管与压缩机的出气口相连通,润滑脂加注腔的顶部和底部通过润滑脂管与润滑脂泵的出液口相连通,在使用时润滑脂泵向润滑脂加注腔内输送润滑脂,润滑脂在润滑脂泵和压缩空气提高的压力作用下将钢丝绳完全浸润。因此,本设计可以通过上增压腔、润滑脂加注腔和下增压腔配合,使用润滑脂将钢丝绳完全浸润,自动完成钢丝绳润滑工作,有效提高系统自动化程度。
18.3、本发明一种钢丝绳除污润滑一体化机器人中除污润滑装置的正下方设置有污泥收集托盘,污泥收集托盘包括托盘、托盘壁、钢丝绳管和污泥袋安装管,污泥收集托盘上各部件均包括镜像对称的两个组合部,托盘为底面倾斜的盘状结构,托盘通过连接臂与车身的底板固定连接,托盘外圆周的顶部固定设置有管状结构的托盘壁,托盘的中部固定设置有钢丝绳管,污泥袋安装管固定设置于托盘的底部,污泥袋安装管上可以套设污泥袋,两个组合部可以开合使钢丝绳穿过钢丝绳管。因此,本设计可以通过可开合的污泥收集托盘使钢丝绳穿过钢丝绳管,除污润滑装置清理下的污物受重力影响下落至污泥收集托盘上,
再通过污泥袋安装管进入污泥袋内,避免污物污染场地。
19.4、本发明一种钢丝绳除污润滑一体化机器人中齿轮盒近车身侧固定设置有滑轨,车身顶板的前端固定设置有滑块,使得除污润滑装置与车身间可以形成稳定的滑动配合,滑块的顶部固定设置有滑轨固定电机,滑轨固定电机可以通过夹爪夹紧,在不需要升降时提高稳固的支持。因此,本设计可以通过滑轨、滑块和滑轨固定电机相配合,使除污润滑装置与车身间可以形成稳定的滑动配合和稳固的支持,有效提高系统使用的安全性。
附图说明
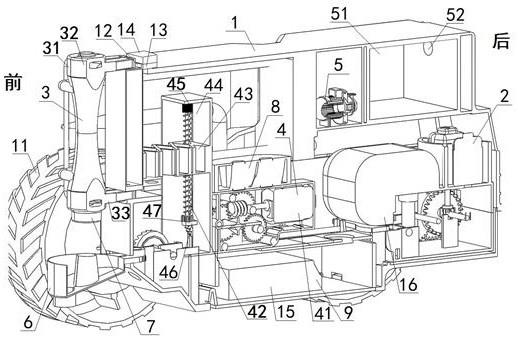
20.图1是本发明的结构示意图。
21.图2是本发明的主视图。
22.图3是图1中除污润滑装置的结构示意图。
23.图4是图1中污泥收集托盘的结构示意图。
24.图中:车身1、行走轮11、滑轨12、滑块13、滑轨固定电机14、无线模块15、电瓶16、动力机构2、除污润滑装置3、第一半套筒31、第二半套筒32、机械臂33、齿轮盒34、上增压腔35、润滑脂加注腔36、下增压腔37、刮刀腔38、开合电机39、升降机构4、升降电机41、蜗杆42、升降臂43、蜗杆安装仓44、端面轴承45、蜗杆安装板46、升降齿轮47、润滑脂泵5、润滑脂箱51、润滑脂加注口52、污泥收集托盘6、托盘61、托盘壁62、钢丝绳管63、污泥袋安装管64、连接臂65、旋转刮刀7、半环形刮刀71、角度开关72、加热模组73、压缩机8、控制器9。
具体实施方式
25.以下结合附图说明和具体实施方式对本发明作进一步详细的说明。
26.参见图1至图4,一种钢丝绳除污润滑一体化机器人,所述机器人包括:车身1、动力机构2、除污润滑装置3和控制器9;所述车身1两侧各设置有两个行走轮11,所述动力机构2固定设置于车身1内,所述动力机构2的动力输出轴通过齿轮组与各个行走轮11传动配合,所述除污润滑装置3布置在车身1外部,所述除污润滑装置3包括镜像对称的第一半套筒31和第二半套筒32,所述第一半套筒31和第二半套筒32共同组成管状结构的刷筒,钢丝绳穿过刷筒后与刷筒的内壁压紧配合,所述第一半套筒31和第二半套筒32均通过机械臂33与车身1旋转配合,所述第一半套筒31的侧部通过润滑脂管与润滑脂泵5的出液口相连通,所述控制器9固定设置于车身1内部;所述动力机构2的行驶信号输入端与控制器9的行驶信号输出端相连接,所述升降机构4的升降信号输入端与控制器9的升降信号输出端相连接。
27.所述机器人还包括污泥收集托盘6,所述污泥收集托盘6设置于除污润滑装置3的正下方,所述污泥收集托盘6包括托盘61、托盘壁62、钢丝绳管63和污泥袋安装管64,所述托盘61为底面倾斜的盘状结构,所述托盘61通过连接臂65与车身1的底板1固定连接,所述托盘61外圆周的顶部固定设置有管状结构的托盘壁62,所述托盘61的中部固定设置有钢丝绳管63,所述钢丝绳管63为中空的管状结构,所述钢丝绳管63穿过托盘61的底板后与托盘61连接为一体,所述污泥袋安装管64固定设置于托盘61的底部,所述污泥袋安装管64穿过托盘61的底板后与托盘61连接为一体。
28.所述托盘61、托盘壁62、钢丝绳管63和污泥袋安装管64均包括镜像对称的两个组合部,所述托盘61的两个组合部各通过一个连接臂与车身1的底板1旋转配合,所述托盘61
两个组合部的连接处各设置有一个卡口,所述托盘61的两个组合部通过其上设置的卡口互相连接,所述托盘61、托盘壁62、钢丝绳管63和污泥袋安装管64的两个组合部共同形成完整的污泥收集托盘6。
29.所述除污润滑装置3包括镜像对称的第一半套筒31和第二半套筒32,所述第一半套筒31和第二半套筒32共同组成管状结构的刷筒,所述第一半套筒31和第二半套筒32的顶部和底部各固定设置有一个机械臂33,所述第一半套筒31和第二半套筒32均通过其上设置的机械臂33与齿轮盒34旋转配合,所述第一半套筒31和第二半套筒32的内侧开设有凹槽,所述第一半套筒31和第二半套筒32共同组成刷筒后其内部的凹槽由上至下依次形成上增压腔35、润滑脂加注腔36、下增压腔37和刮刀腔38,所述上增压腔35、润滑脂加注腔36、下增压腔37和刮刀腔38依次由上至下设置于刷筒内,所述上增压腔35、润滑脂加注腔36、下增压腔37和刮刀腔38之间依次互相连通,所述上增压腔35和下增压腔37的侧部均开设有一个空气入口,两个空气入口上均固定设置有压缩空气管,所述上增压腔35和下增压腔37均通过其上设置的压缩空气管与压缩机8的出气口相连通,所述压缩机8固定设置于升降机构4的正上方,所述润滑脂加注腔36的顶部和底部开设有润滑脂孔,所述润滑脂孔上固定设置有润滑脂管,所述润滑脂加注腔36通过其上设置的润滑脂管与润滑脂泵5的出液口相连通,所述润滑脂泵5的进液口与润滑脂箱51的底部相连通,所述润滑脂泵5和润滑脂箱51均固定设置于动力机构2的顶部,所述润滑脂箱51的后部设置有润滑脂加注口52,所述润滑脂加注腔36的内侧固定设置有可拆卸的螺旋线板,所述螺旋线板上均匀设置有螺旋线,所述螺旋线与钢丝绳上各股子绳之间的缝隙对应设置,所述刮刀腔38内设置有可拆卸的旋转刮刀7,所述旋转刮刀7与除污润滑装置3旋转配合,所述旋转刮刀7的中部开设有可容纳钢丝绳的异形孔,所述异形孔内均匀固定有多个与钢丝绳上各股子绳之间的缝隙对应设置的除污刀口。
30.所述齿轮盒34内设置有开合电机39,所述开合电机39的动力输出轴与各个机械臂33传动配合,所述开合电机39用于驱动第一半套筒31和第二半套筒32张开或合拢,所述开合电机39的开合信号输入端与控制器9的开合信号输出端相连接。
31.所述旋转刮刀7包括镜像对称的两个半环形刮刀71和两个角度开关72,两个半环形刮刀71共同组成环形结构的刮刀,两个半环形刮刀71的内圆周上均固定设置有多个与钢丝绳上的各股子绳对应设置的除污刀口,两个角度开关72分别设置于两个半环形刮刀71的两个连接口处,两个角度开关72的触杆均与第一半套筒31和第二半套筒32传动配合,两个半环形刮刀71与第一半套筒31和第二半套筒32之间设置有加热模组73,两个角度开关72的角度信号输出端与控制器9的限位信号输入端相连接,所述加热模组73的加热信号输入端与控制器9的加热信号输出端相连接。
32.所述机器人还包括升降机构4,所述升降机构4包括升降电机41、蜗杆42和升降臂43,所述升降电机41固定设置于车身1前侧的底板上,所述升降电机41的近车头侧固定设置有蜗杆安装仓44,所述蜗杆安装仓44为长方体结构,所述蜗杆安装仓44顶板的底部固定设置有端面轴承45,所述端面轴承45的正下方设置有蜗杆安装板46,所述蜗杆安装板46的顶部固定设置有另一个端面轴承45,所述蜗杆42沿竖直方向设置于两个端面轴承45之间,所述蜗杆42的顶部和底部均与其对应侧的端面轴承45旋转配合,所述蜗杆42的底部固定设置有升降齿轮47,所述蜗杆42通过升降齿轮47与升降电机41传动配合,所述升降臂43的一端
开设有与蜗杆42相配合的螺旋孔,所述蜗杆42穿过螺旋孔后与升降臂43传动配合,当蜗杆42旋转时,升降臂43根据旋转方向在蜗杆42上升降,所述升降臂43的另一端与齿轮盒34固定连接,所述升降电机41的升降信号输入端与控制器9的升降信号输出端相连接。
33.所述齿轮盒34的近车身侧固定设置有滑轨12,所述车身1顶板的前端固定设置有滑块13,所述滑块13的顶部固定设置有滑轨固定电机14,所述齿轮盒34通过其上设置的滑轨12与滑块13滑动配合,所述滑轨固定电机14通过动力输出轴上设置的夹爪与滑轨12限位配合,所述滑轨固定电机14的限位信号输入端与控制器9的限位信号输出端相连接。
34.所述机器人还包括电瓶16和无线模块15,机器人内部各用电设备均通过电瓶16供电,所述无线模块15的无线信号输出端与控制器9的线信号输入端相连接。
35.本发明的原理说明如下:本发明在进行时,操作者通过无线模块15向控制器9发出控制信号,控制器9驱动动力机构2开始工作,动力机构2通过其动力输出轴带动行走轮11开始工作,行走轮11带动机器人移动至工作位置;机器人到达工作位置后,操作者通过无线模块15向控制器9发出控制信号,控制器9驱动升降电机41开始工作,升降电机41通过与其传动连接的蜗杆42带动除污润滑装置3升降至工作高度;除污润滑装置3达到工作高度后,控制器9驱动开合电机39开始工作,开合电机39控制机械臂33带动第一半套筒31和第二半套筒32关闭,第一半套筒31和第二半套筒32将待清洁的钢丝绳夹入上增压腔35、润滑脂加注腔36、下增压腔37和刮刀腔38中,此时润滑脂加注腔36内的螺旋线与钢丝绳上各股子绳之间的缝隙对应设置,同时旋转刮刀7上的除污刀口也与钢丝绳上各股子绳之间的缝隙对应设置;当待清洁的钢丝绳处于正确位置后,操作者手动控制污泥收集托盘6合拢,再将污泥袋套设在污泥袋安装管64上,此时除污润滑准备工作完成,操作者开启钢丝绳卷筒驱动电机,钢丝绳卷筒旋转带动钢丝绳上升,同时操作者通过无线模块15向控制器9发出控制信号,控制器9驱动润滑脂泵5、加热模组73和压缩机8开始工作,加热模组73加热旋转刮刀7至50摄氏度,润滑脂泵5向润滑脂加注腔36内输送润滑脂,压缩机8向上增压腔35和下增压腔37内输送压缩空气,润滑脂加注腔36内的润滑脂在润滑脂泵5和压缩空气的作用下在润滑脂加注腔36内形成高压区;当钢丝绳通过旋转刮刀7时,旋转刮刀7内的除污刀口沿钢丝绳扭转角的方向旋转,同时刮除钢丝绳内老化的润滑脂,被刮除的润滑脂受重力影响下落至污泥收集托盘6上,再通过污泥袋安装管64进入污泥袋内,当钢丝绳通过润滑脂加注腔36内的高压区时,润滑脂被压力压入钢丝绳内,将钢丝绳完全浸润;当整根钢丝绳均通过除污润滑装置3后,操作者通过无线模块15向控制器9发出控制信号,控制器9驱动开合电机39开始工作,开合电机39控制机械臂33带动第一半套筒31和第二半套筒32打开,此时操作者手动取下污泥袋,同时打开污泥收集托盘6,此时除污润滑工作完成。
36.实施例1:一种钢丝绳除污润滑一体化机器人,所述机器人包括:车身1、动力机构2、除污润滑装置3和控制器9;所述车身1两侧各设置有两个行走轮11,所述动力机构2固定设置于车
身1内,所述动力机构2的动力输出轴通过齿轮组与各个行走轮11传动配合,所述除污润滑装置3布置在车身1外部,所述除污润滑装置3包括镜像对称的第一半套筒31和第二半套筒32,所述第一半套筒31和第二半套筒32共同组成管状结构的刷筒,钢丝绳穿过刷筒后与刷筒的内壁压紧配合,所述第一半套筒31和第二半套筒32均通过机械臂33与车身1旋转配合,所述第一半套筒31的侧部通过润滑脂管与润滑脂泵5的出液口相连通,所述控制器9固定设置于车身1内部;所述动力机构2的行驶信号输入端与控制器9的行驶信号输出端相连接,所述升降机构4的升降信号输入端与控制器9的升降信号输出端相连接。
37.所述机器人还包括污泥收集托盘6,所述污泥收集托盘6设置于除污润滑装置3的正下方,所述污泥收集托盘6包括托盘61、托盘壁62、钢丝绳管63和污泥袋安装管64,所述托盘61为底面倾斜的盘状结构,所述托盘61通过连接臂65与车身1的底板1固定连接,所述托盘61外圆周的顶部固定设置有管状结构的托盘壁62,所述托盘61的中部固定设置有钢丝绳管63,所述钢丝绳管63为中空的管状结构,所述钢丝绳管63穿过托盘61的底板后与托盘61连接为一体,所述污泥袋安装管64固定设置于托盘61的底部,所述污泥袋安装管64穿过托盘61的底板后与托盘61连接为一体。
38.所述托盘61、托盘壁62、钢丝绳管63和污泥袋安装管64均包括镜像对称的两个组合部,所述托盘61的两个组合部各通过一个连接臂与车身1的底板1旋转配合,所述托盘61两个组合部的连接处各设置有一个卡口,所述托盘61的两个组合部通过其上设置的卡口互相连接,所述托盘61、托盘壁62、钢丝绳管63和污泥袋安装管64的两个组合部共同形成完整的污泥收集托盘6。
39.所述除污润滑装置3包括镜像对称的第一半套筒31和第二半套筒32,所述第一半套筒31和第二半套筒32共同组成管状结构的刷筒,所述第一半套筒31和第二半套筒32的顶部和底部各固定设置有一个机械臂33,所述第一半套筒31和第二半套筒32均通过其上设置的机械臂33与齿轮盒34旋转配合,所述第一半套筒31和第二半套筒32的内侧开设有凹槽,所述第一半套筒31和第二半套筒32共同组成刷筒后其内部的凹槽由上至下依次形成上增压腔35、润滑脂加注腔36、下增压腔37和刮刀腔38,所述上增压腔35、润滑脂加注腔36、下增压腔37和刮刀腔38依次由上至下设置于刷筒内,所述上增压腔35、润滑脂加注腔36、下增压腔37和刮刀腔38之间依次互相连通,所述上增压腔35和下增压腔37的侧部均开设有一个空气入口,两个空气入口上均固定设置有压缩空气管,所述上增压腔35和下增压腔37均通过其上设置的压缩空气管与压缩机8的出气口相连通,所述压缩机8固定设置于升降机构4的正上方,所述润滑脂加注腔36的顶部和底部开设有润滑脂孔,所述润滑脂孔上固定设置有润滑脂管,所述润滑脂加注腔36通过其上设置的润滑脂管与润滑脂泵5的出液口相连通,所述润滑脂泵5的进液口与润滑脂箱51的底部相连通,所述润滑脂泵5和润滑脂箱51均固定设置于动力机构2的顶部,所述润滑脂箱51的后部设置有润滑脂加注口52,所述润滑脂加注腔36的内侧固定设置有可拆卸的螺旋线板,所述螺旋线板上均匀设置有螺旋线,所述螺旋线与钢丝绳上各股子绳之间的缝隙对应设置,所述刮刀腔38内设置有可拆卸的旋转刮刀7,所述旋转刮刀7与除污润滑装置3旋转配合,所述旋转刮刀7的中部开设有可容纳钢丝绳的异形孔,所述异形孔内均匀固定有多个与钢丝绳上各股子绳之间的缝隙对应设置的除污刀口。
40.所述齿轮盒34内设置有开合电机39,所述开合电机39的动力输出轴与各个机械臂
33传动配合,所述开合电机39用于驱动第一半套筒31和第二半套筒32张开或合拢,所述开合电机39的开合信号输入端与控制器9的开合信号输出端相连接。
41.所述旋转刮刀7包括镜像对称的两个半环形刮刀71和两个角度开关72,两个半环形刮刀71共同组成环形结构的刮刀,两个半环形刮刀71的内圆周上均固定设置有多个与钢丝绳上的各股子绳对应设置的除污刀口,两个角度开关72分别设置于两个半环形刮刀71的两个连接口处,两个角度开关72的触杆均与第一半套筒31和第二半套筒32传动配合,两个半环形刮刀71与第一半套筒31和第二半套筒32之间设置有加热模组73,两个角度开关72的角度信号输出端与控制器9的限位信号输入端相连接,所述加热模组73的加热信号输入端与控制器9的加热信号输出端相连接。
42.所述机器人还包括升降机构4,所述升降机构4包括升降电机41、蜗杆42和升降臂43,所述升降电机41固定设置于车身1前侧的底板上,所述升降电机41的近车头侧固定设置有蜗杆安装仓44,所述蜗杆安装仓44为长方体结构,所述蜗杆安装仓44顶板的底部固定设置有端面轴承45,所述端面轴承45的正下方设置有蜗杆安装板46,所述蜗杆安装板46的顶部固定设置有另一个端面轴承45,所述蜗杆42沿竖直方向设置于两个端面轴承45之间,所述蜗杆42的顶部和底部均与其对应侧的端面轴承45旋转配合,所述蜗杆42的底部固定设置有升降齿轮47,所述蜗杆42通过升降齿轮47与升降电机41传动配合,所述升降臂43的一端开设有与蜗杆42相配合的螺旋孔,所述蜗杆42穿过螺旋孔后与升降臂43传动配合,当蜗杆42旋转时,升降臂43根据旋转方向在蜗杆42上升降,所述升降臂43的另一端与齿轮盒34固定连接,所述升降电机41的升降信号输入端与控制器9的升降信号输出端相连接。
43.实施例2:实施例2与实施例1基本相同,其不同之处在于:所述齿轮盒34的近车身侧固定设置有滑轨12,所述车身1顶板的前端固定设置有滑块13,所述滑块13的顶部固定设置有滑轨固定电机14,所述齿轮盒34通过其上设置的滑轨12与滑块13滑动配合,所述滑轨固定电机14通过动力输出轴上设置的夹爪与滑轨12限位配合,所述滑轨固定电机14的限位信号输入端与控制器9的限位信号输出端相连接。
44.实施例3:实施例3与实施例2基本相同,其不同之处在于:所述机器人还包括电瓶16和无线模块15,机器人内部各用电设备均通过电瓶16供电,所述无线模块15的无线信号输出端与控制器9的线信号输入端相连接。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1