改善最终洗净后颗粒沾污的装置及其控制方法与流程
1.本发明涉及晶圆加工工艺技术领域,具体涉及一种改善最终洗净后颗粒沾污的装置及其控制方法。
背景技术:
2.目前在晶圆加工工艺中,洗净工艺事影响晶圆表面洁净度最重要的工艺步骤。由于硅片最终洗净的环境必须是具有高洁净度的无尘环境,以8寸硅片生产为例,机台工作的区域是保持在洁净度一级的环境中。但在洗净结束的后续检查及测定过程中,不可避免的会引入颗粒污染。为尽量减少洗净后续过程造成的各种环境挥发物就显得尤为重要。
3.目前硅片清洗工艺大多都采用rca清洗方法,多数包含两种清洗液sc1及sc2。通过直接溶解、先氧化后溶解或与硅片表面形成静电排斥作用等移除原理,可将表面颗粒移除。但随着产品要求的逐步提升,硅片表面颗粒清洗过程中对于有效的移除颗粒有给更高的要求,同时不同后续制成工艺及移栽过程都会使硅片表面颗粒有或多或少的增加。
技术实现要素:
4.本发明主要解决现有技术中存在的洗净补彻底和二次污染不足,提供了一种改善最终洗净后颗粒沾污的装置及其控制方法,其具有结构紧凑、效果好和运行稳定性强的优点。通过在最终洗净机台中加入超音波清洗工艺的同时,有效的运用药液槽清洗工艺,配合后续搬运密封装置,减少颗粒污染。
5.本发明的上述技术问题主要是通过下述技术方案得以解决的:
6.一种改善最终洗净后颗粒沾污的装置,包括清洗箱体,所述的清洗箱体下部设有若干清洗槽,所述的清洗槽下部设有超音波清洗器,所述的清洗槽后端设有烘干槽,所述的清洗箱体上部设有横移导轨架,所述的横移导轨架下端设有与清洗槽、烘干槽相活动式套接的硅片盒,所述的硅片盒与横移导轨架间设有与横移导轨架相滑动式连接的机械移取臂。
7.作为优选,所述的机械移取臂上端设有与横移导轨架相卡嵌式滑动连接的横移气缸。
8.作为优选,所述的机械移取臂包括与横移气缸相连接固定的夹紧气缸,所述的夹紧气缸下端两侧均设有夹板,所述的夹板与夹紧气缸间均设有升降气缸臂。
9.作为优选,所述的夹紧气缸与横移气缸间均设有旋转连接座。
10.作为优选,所述的横移气缸上端设有地址码传感器,所述的清洗箱体上端设有若干与清洗槽、烘干槽相对应的定位地址码发送器,所述的地址码传感器与定位地址码发送器间采用传感式信号接触控制。
11.作为优选,所述的烘干槽下部设有格栅隔板,所述的格栅隔板上端外围设有若干与烘干槽内壁相固定连接的烘干加热管,烘干加热管呈等间距分布。
12.作为优选,所述的清洗槽前端上方设有与清洗箱体相连通的进盒仓,所述的烘干
槽后端上方设有与清洗箱体相连通的出盒仓。
13.一种改善最终洗净后颗粒沾污的装置的控制方法,包括如下操作步骤:
14.第一步:清洗槽设有7个,分别将所需的液体注入7个清洗槽内,清洗1槽内为sc-1液,sc-1液成分由nh4oh、h2o2、diw组成;清洗2槽内为纯水;清洗3槽内为sc-2液,sc-2液成分由hcl、h2o2、diw组成;清洗4槽内为纯水;清洗5槽内为臭氧;清洗6槽内为dhf,dhf成分由hf、diw组成;清洗7槽内为纯水。
15.第二步:硅片盒通过机械移取臂夹取,采用横移气缸依次从7个清洗槽内进行清洗。
16.在清洗1槽内的sc-1液nh4oh与h2o2采用体积比1∶2的组分,在45℃清洗3~5min,硅片表面经h2o2氧化后,开启超音波清洗器在超声环境中与nh4oh反应将颗粒剥离去除。
17.在清洗3槽内的sc-2液hcl与h2o2采用体积比3∶20的组分,在40℃下清洗3~5min,进一步氧化后的硅片与盐酸反应生成的金属离子随diw被去除。
18.在清洗5槽内通入的臭氧可以在硅片表面形成氧化膜,与清洗6槽内为dhf中的hf反应后形成疏水层更好的去除金属及颗粒。
19.第三步:经过清洗槽内的药液清洗后,再放置到烘干槽内进行烘干。
20.作为优选,当硅片盒送入清洗箱体时,旋转连接座运行使得夹板位于硅片盒前后位置进行夹取,当夹紧气缸驱动夹板夹紧后旋转连接座旋转90度,采用横移气缸依次经过7个清洗槽和烘干槽的清洗工艺过程,洗净后转连接座旋转90度,使得夹板对硅片盒进行前后位置夹取,方便硅片盒出料。
21.作为优选,当横移气缸运行至清洗槽或烘干槽进行作业时,采用升降气缸臂实现对硅片盒的升降送料取料过程。
22.本发明能够达到如下效果:
23.本发明提供了一种改善最终洗净后颗粒沾污的装置及其控制方法,与现有技术相比较,具有结构紧凑、效果好和运行稳定性强的优点。通过在最终洗净机台中加入超音波清洗工艺的同时,有效的运用药液槽清洗工艺,配合后续搬运密封装置,减少颗粒污染。
附图说明
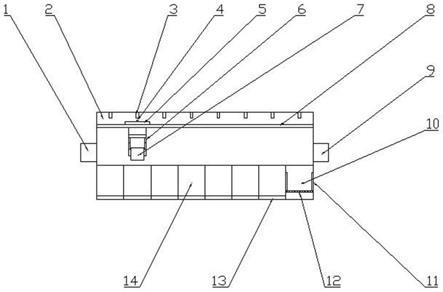
24.图1是本发明的结构示意图。
25.图2是本发明的机械移取臂结构示意图。
26.图中:进盒仓1,清洗箱体2,定位地址码发送器3,地址码传感器4,横移气缸5,机械移取臂6,硅片盒7,横移导轨架8,出盒仓9,烘干槽10,烘干加热管11,格栅隔板12,超音波清洗器13,清洗槽14,旋转连接座15,夹紧气缸16,升降气缸臂17,夹板18。
具体实施方式
27.下面通过实施例,并结合附图,对发明的技术方案作进一步具体的说明。
28.实施例:如图1和图2所示,一种改善最终洗净后颗粒沾污的装置,包括清洗箱体2,清洗箱体2下部设有7个清洗槽14,清洗槽14下部设有超音波清洗器13,清洗槽14后端设有烘干槽10,烘干槽10下部设有格栅隔板12,格栅隔板12上端外围设有8个呈等间距与烘干槽10内壁相固定连接的烘干加热管11。清洗槽14前端上方设有与清洗箱体2相连通的进盒仓
1,烘干槽10后端上方设有与清洗箱体2相连通的出盒仓9。清洗箱体2上部设有横移导轨架8,横移导轨架8下端设有与清洗槽14、烘干槽10相活动式套接的硅片盒7,硅片盒7与横移导轨架8间设有与横移导轨架8相滑动式连接的机械移取臂6,机械移取臂6包括与横移气缸5相连接固定的夹紧气缸16,夹紧气缸16下端两侧均设有夹板18,夹板18与夹紧气缸16间均设有升降气缸臂17。夹紧气缸16与横移气缸5间均设有旋转连接座15。机械移取臂6上端设有与横移导轨架8相卡嵌式滑动连接的横移气缸5,横移气缸5上端设有地址码传感器4,清洗箱体2上端设有若干与清洗槽14、烘干槽10相对应的定位地址码发送器3,地址码传感器4与定位地址码发送器3间采用传感式信号接触控制。
29.一种改善最终洗净后颗粒沾污的装置的控制方法,包括如下操作步骤:
30.第一步:清洗槽14设有7个,分别将所需的液体注入7个清洗槽14内,清洗1槽内为sc-1液,sc-1液成分由nh4oh、h2o2、diw组成;清洗2槽内为纯水;清洗3槽内为sc-2液,sc-2液成分由hcl、h2o2、diw组成;清洗4槽内为纯水;清洗5槽内为臭氧;清洗6槽内为dhf,dhf成分由hf、diw组成;清洗7槽内为纯水。
31.第二步:硅片盒7通过机械移取臂6夹取,采用横移气缸5依次从7个清洗槽14内进行清洗。
32.在清洗1槽内的sc-1液nh4oh与h2o2采用体积比1∶2的组分,在45℃清洗4min,硅片表面经h2o2氧化后,开启超音波清洗器13在超声环境中与nh4oh反应将颗粒剥离去除。
33.在清洗3槽内的sc-2液hcl与h2o2采用体积比3∶20的组分,在40℃下清洗4min,进一步氧化后的硅片与盐酸反应生成的金属离子随diw被去除。
34.第三步:经过清洗槽14内的药液清洗后,再放置到烘干槽10内进行烘干。
35.当硅片盒7送入清洗箱体2时,旋转连接座15运行使得夹板18位于硅片盒7前后位置进行夹取,当夹紧气缸16驱动夹板18夹紧后旋转连接座15旋转90度,采用横移气缸5依次经过7个清洗槽14和烘干槽10的清洗工艺过程,当横移气缸5运行至清洗槽14或烘干槽10进行作业时,采用升降气缸臂17实现对硅片盒7的升降送料取料过程。洗净后转连接座15旋转90度,使得夹板18对硅片盒7进行前后位置夹取,方便硅片盒7出料。
36.综上所述,该改善最终洗净后颗粒沾污的装置及其控制方法,具有结构紧凑、效果好和运行稳定性强的优点。通过在最终洗净机台中加入超音波清洗工艺的同时,有效的运用药液槽清洗工艺,配合后续搬运密封装置,减少颗粒污染。
37.以上所述仅为本发明的具体实施例,但本发明的结构特征并不局限于此,任何本领域的技术人员在本发明的领域内,所作的变化或修饰皆涵盖在本发明的专利范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1