一种沉淀池出水槽自动清洗装置的制作方法
1.本实用新型属于出水槽清洗设备技术领域,具体涉及一种沉淀池出水槽自动清洗装置。
背景技术:
2.沉淀池是利用沉淀作用去除水中悬浮物的一种构筑物。利用水的自然沉淀或混凝沉淀的作用来除去水中的悬浮物,起到净化水质的效果。处理后的水最后通过出水槽进入下一个环节,在运行一段时间后,出水槽会附着着泥垢或者藻类,时间长了会影响感观及出水效果,同时清理变得非常困难。
3.在现有技术中,目前对沉淀池出水槽的清洗多采用人工清洗,清洗时间长,费用成本高,影响生产,并且人工清洗存在安全隐患;目前常用的平流沉淀池、斜管、斜板沉淀池的出水槽因其距离较长,其内部设有对撑的支撑结构,因此对于其内壁的自动清洗所产生的难题暂时还没有解决方案。
技术实现要素:
4.本实用新型的目的在于提供一种沉淀池出水槽自动清洗装置,用于解决现有技术中存在的沉淀池出水槽无法自动清洗的问题。
5.本实用新型的目的可以通过以下技术方案实现:
6.一种沉淀池出水槽自动清洗装置,包括控制系统,所述控制系统包括电路模块、行车驱动模块和无线模块,还包括安装底板,所述安装底板上安装有对称设置的清洗旋转机构一和清洗旋转机构二,所述清洗旋转机构一沿其轴线方向的两侧相对设置有外壁清洗机构一和外壁清洗机构二,所述清洗旋转机构二沿其轴线方向的两侧相对设置有外壁清洗机构三和外壁清洗机构四,所述安装底板的上方密封安装有外壳,所述外壳的两侧分别安装有转向感应器一和转向感应器二;
7.所述清洗旋转机构一和所述清洗旋转机构二结构相同,均包括第一电机、第二电机、内壁毛刷、电源接收板、电源发送机构、电源发送板、电源接收机构、中心轴、旋转感应器一和旋转感应器二,所述第二电机固定安装在所述安装底板上,所述第二电机的输出端通过所述中心轴驱动连接有电源接收机构,所述电源接收机构内部固定设置有所述第一电机,所述第一电机的输出端驱动连接有所述内壁毛刷,所述电源接收机构与所述电源发送机构通过所述电源接收板相连接,所述内壁毛刷的两侧安装有相对设置的所述旋转感应器一和所述旋转感应器二,所述电源接收板中心点与所述电源发送板中心点及所述第二电机轴承中心点重合成一直线。
8.作为本实用新型进一步的方案:所述电源发送板呈圆形结构,所述电源发送板中心点上方设有第二触点,用于为所述第一电机供电。
9.作为本实用新型进一步的方案:所述电源接收板呈圆形结构,所述电源接收板中心点上方设有第一触点,通过所述第一触点与所述第二触点接触而获取动力电源。
10.作为本实用新型进一步的方案:所述外壁清洗机构一、外壁清洗机构二、外壁清洗机构三和外壁清洗机构四结构相同,均包括固定安装在所述安装底板上的第三电机,所述第三电机的输出端驱动连接有外壁毛刷。
11.作为本实用新型进一步的方案:所述安装底板安装所述清洗旋转机构一和所述清洗旋转机构二的位置镂空,镂空长度能实现所述清洗旋转机构一和所述清洗旋转机构二的旋转动作。
12.作为本实用新型进一步的方案:所述外壳为具有一定长度的几何体结构,且所述外壳靠近所述转向感应器二的一侧呈弧形。
13.作为本实用新型进一步的方案:所述外壳将所述电源接收机构包裹实现密封,用于防进水。
14.作为本实用新型进一步的方案:所述第一电机、所述旋转感应器一和所述旋转感应器二均与所述电源接收板触点连接,并置于所述电源接收机构内。
15.本实用新型的有益效果:
16.(1)本实用新型所公开的一种沉淀池出水槽自动清洗装置通过清洗旋转机构一和旋转感应器一相互配合、清洗旋转机构二与旋转感应器二相互配合,当接近支撑结构时,旋转清洗机组自动进行旋转,从而越过支撑结构,解决了内壁自动清洗的问题;
17.(2)本实用新型所公开的一种沉淀池出水槽自动清洗装置通过转向感应器一和转向感应器二相互配合,实现自动清洗功能,减少费用成本,杜绝了人工清洗的安全隐患,适用于沉淀池的出水槽的内外壁清洗。
附图说明
18.下面结合附图对本实用新型作进一步的说明。
19.图1是本实用新型提出的一种沉淀池出水槽自动清洗装置内部结构示意图;
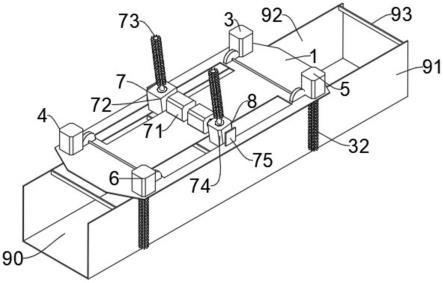
20.图2是本实用新型提出的一种沉淀池出水槽自动清洗装置整体结构示意图;
21.图3是本实用新型提出的一种沉淀池出水槽自动清洗装置清洗旋转机构结构示意图;
22.图4是本实用新型提出的一种沉淀池出水槽自动清洗装置外壁清洗机构结构示意图;
23.图5是本实用新型提出的一种沉淀池出水槽自动清洗装置电源发送板结构示意图;
24.图6是本实用新型提出的一种沉淀池出水槽自动清洗装置电源接收板结构示意图。
25.图中:1、安装底板;2、外壳;21、转向感应器一;22、转向感应器二;3、外壁清洗机构一;4、外壁清洗机构二;5、外壁清洗机构三;6、外壁清洗机构四;7、清洗旋转机构一;8、清洗旋转机构二;31、第三电机;32、外壁毛刷;90、出水槽;91、出水槽外壁;92、出水槽内壁;93、支撑结构;70、中心轴;71、第二电机;72、第一电机;73、内壁毛刷;74、电源接收机构;741、电源接收板;742、第一触点;75、电源发送机构;751、电源发送板;752、第二触点;76、旋转感应器一;77、旋转感应器二。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
27.如图1-4所示,一种沉淀池出水槽自动清洗装置,包括安装底板1,安装底板1下方为出水槽90,出水槽内壁92上每隔一段距离设置有支撑结构93,安装底板1中部安装有对称设置的清洗旋转机构一7和清洗旋转机构二8,清洗旋转机构一7沿其轴线方向的左右两侧相对设置有外壁清洗机构一3和外壁清洗机构二4,清洗旋转机构二8沿其轴线方向的左右两侧相对设置有外壁清洗机构三5和外壁清洗机构四6,安装底板1的上方密封安装有外壳2,所述外壳2的两侧分别安装有转向感应器一21和转向感应器二22;
28.清洗旋转机构一7和清洗旋转机构二8结构相同,均包括第一电机72、第二电机71、内壁毛刷73、电源接收板741、电源发送机构75、电源发送板751、电源接收机构74、中心轴70、旋转感应器一76和旋转感应器二77,第二电机71固定安装在安装底板1上,第二电机71的输出端通过中心轴70驱动连接有电源接收机构74,电源接收机构74内部固定设置有第一电机72,第一电机72的输出端驱动连接有内壁毛刷73,电源接收机构74与电源发送机构75通过电源接收板741相连接,内壁毛刷73的两侧安装有相对设置的旋转感应器一76和旋转感应器二77,电源接收机构74外部连接着中心轴70,方向与第一电机72驱动轴垂直,第二电机71轴承与中心轴70连接;
29.电源接收机构74底部设置旋转感应器一76和旋转感应器二77,第一电机72、旋转感应器一76和旋转感应器二77的电源线及信号线均与电源接收板741触点连接,并置于电源接收机构74内;
30.电源接收机构74底部设置旋转感应器一76和旋转感应器二77,当旋转感应器一76感应到出水槽90支撑结构93时,第二电机71启动,使第一电机72与内壁毛刷73顺时针旋转360度,当旋转感应器二77感应到出水槽90支撑结构93时,第二电机71启动,使第一电机72与内壁毛刷73逆时针旋转360度;
31.外壁清洗机构一3、外壁清洗机构二4、外壁清洗机构三5和外壁清洗机构四6结构相同,均由第三电机31和外壁毛刷32组成,垂直于水平面安装;外壁清洗机构一3、外壁清洗机构二4、外壁清洗机构三5和外壁清洗机构四6分别布置在自动清洗装置安装底板1的四角,用于清洗出水槽外壁91;
32.自动冲洗装置的外壳2,其形状为长方形也可以是具有一定长度的其他几何体,上面呈弧形,安装清洗旋转机构一7和清洗旋转机构二8的位置镂空,镂空长度能实现清洗旋转机构一7和清洗旋转机构二8的旋转动作;
33.包括控制系统(图中未画出),控制系统包括电路模块、行车驱动模块和无线模块,旋转感应器一76和旋转感应器二77分别安装在自动冲洗装置外壳2的前后两侧,当旋转感应器一76或者旋转感应器二77感应到尽头,则控制系统控制行车驱动模块做出转向动作;
34.如图5-6所示,电源发送板751呈圆形结构,电源发送板751中心点上方设有第二触点752,用于为第一电机72供电,电源接收板741呈圆形结构,电源接收板741中心点上方设有第一触点742,通过所述第一触点742与所述第二触点752接触而获取动力电源。
35.本实用新型所涉及到的一种沉淀池出水槽自动清洗装置的工作原理如下:
36.清洗旋转机构一7和清洗旋转机构二8主要作用于出水槽内壁92的清洗,自动清洗装置在其清洗行径中,因出水槽内壁92每隔一段距离出现支撑结构93,而当自动清洗装置所设的旋转感应器一76、旋转感应器二77感应到支撑结构93时,清洗旋转机构一7和清洗旋转机构二8自行旋转,从而越过支撑结构93;
37.用户启动自动清洗装置,自动清洗装置正向行走,外壁清洗机构一3、外壁清洗机构二4、外壁清洗机构三5和外壁清洗机构四6中的第三电机31的轴承与外壁毛刷32连接,并驱动外壁毛刷32高速旋转,对出水槽外壁91进行清洗;
38.清洗旋转机机构一7和清洗旋转机构二8中的第一电机72的轴承与内壁毛刷73连接,并驱动内壁毛刷73高速旋转,对出水槽内壁92进行清洗;
39.清洗旋转机构一7和清洗旋转机构二8的第一电机72安装在电源接收机构74内,电源接收机构74设置圆形状的电源接收板741,电源接收板741圆心上方设有第一触点742,电源接收板741上的第一触点742通过接触电源发送板751上的第二触点752获得动力电源,使第一电机72旋转而清洗出水槽内壁92,第二电机71轴承与电源接收机构74连接,并且第二电机71的轴承与电源接收机构74的电源接收板741圆心和电源发送机构75的电源发送板751圆心成一直线,在清洗过程中,清洗旋转机构一7和清洗旋转机构二8的旋转感应器一76或旋转感应器二77感应到支撑结构93后,驱动第二电机71以电源接收板741圆心为轴心点进行旋转,在第二电机71进行旋转期间,电源接收板741上的第一触点742与电源发送机构75的电源发送板751上的第二触点752分开,第一电机72失去动力电源,当第二电机71旋转了360度后,电源接收板741上的第一触点742与电源发送板751上的第二触点752重合,此时第一电机72得到动力电源,继续对出水槽内壁92进行清洗;
40.自动清洗装置外壳2上前端及后端分别设置了转向感应器一21、转向感应器二22,在自动清洗装置清洗过程中,自动清洗装置到达终端时转向感应器一21驱动装置折返,最终转向感应器二22接触到始发端后停止清洗。
41.以上对本实用新型的一个实施例进行了详细说明,但所述内容仅为本实用新型的较佳实施例,不能被认为用于限定本实用新型的实施范围。凡依本实用新型申请范围所作的均等变化与改进等,均应仍归属于本实用新型的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1