一种基于水光温储的物联网水体环护机器人
本发明设涉及水体生态修复领域,一种基于水光温储的物联网水体环护机器人本发明可全年全天候监测水体水质情况、监测油类、水华、赤潮等污染,进行水体灾害、风险预警水上工程作业监测和管理:该机器人可以用于港口码头等水上作业环境,综合运用无线通信技、多维激光雷达、摄像头图传技术,提高作业效率、安全性。地理、环保、自然环境监测等科研工作:该发明能够自主巡航运行到世界上大部分水体,且搭载了摄像头、多维激光雷达、gps等模块,在实时监测各地水文状况的同时,也能为地理科研、环境保护工作者和单位实时提供一幅全新的动态变化的水文信息图,附带各地水域二维图、实地场景图、水质信息图等,自主进行大数据分析对比。
背景技术:
1、水资源紧张是21世纪初人类面对的头号问题,闵敏曾指出水污染加剧了全球的水资源短缺,危及环境健康,严重制约人类社会、经济与环境的可持续发展,当前我国面临着水量危机的同时,还面临着因污染导致的水质危机。近年来,治理河海生态环境作为社会热点问题一直备受关注,但是全球河海污染问题一直得不到很好地解决。因此水环境污染不仅需要国家部门的监督管理控制,还需要专业的科学技术进行技术处理。国外许多国家相当重视水域污染的治理,投入了大量的资金研发相应的环保设备,针对具体的水域污染情況,研制了多款机械化程度较高的水面清洁船,如美国umi公司研制的“trashcat”系列清洁船、韩国海洋研究院研发的“海洋清洁”号清洁船、西班牙beach-trollers公司研制的“solid”清洁船。随着我国水域环境问题愈加严峻、国民环保意识的提升,国内也投入了大量的研发资金,研制了一系列的水面清洁船。
2、在技术层面,现有的河海净化处理技术均不能有效且温和地处理各类水体污染问题、实现水体净化装置的功能全面化与智能化有机统一。采取人工打捞或人工与机械相结合打捞方式效率低下,不仅需要大量的人力物力而且打捞面积较小、还可能造成二次污染、治理效果不佳。现有的水上环境检测机器人种类多,但是功能单一、智能化水平低、存在一定地缺陷,运行成本高,难以广泛推广,并不能均衡全面地实现河海治理。
3、该作品的创新点较强,可以在全国乃至全球大范围内的环境动态检测方向上具有很强的实用性,其工作的高智能化、能源自主性为人们的环境检测护理工作节省了大量的时间精力、财力,且获得的数据更广泛全面。该装置可在河海水质监测、净化领域发挥重大作用,应用前景广阔。
技术实现思路
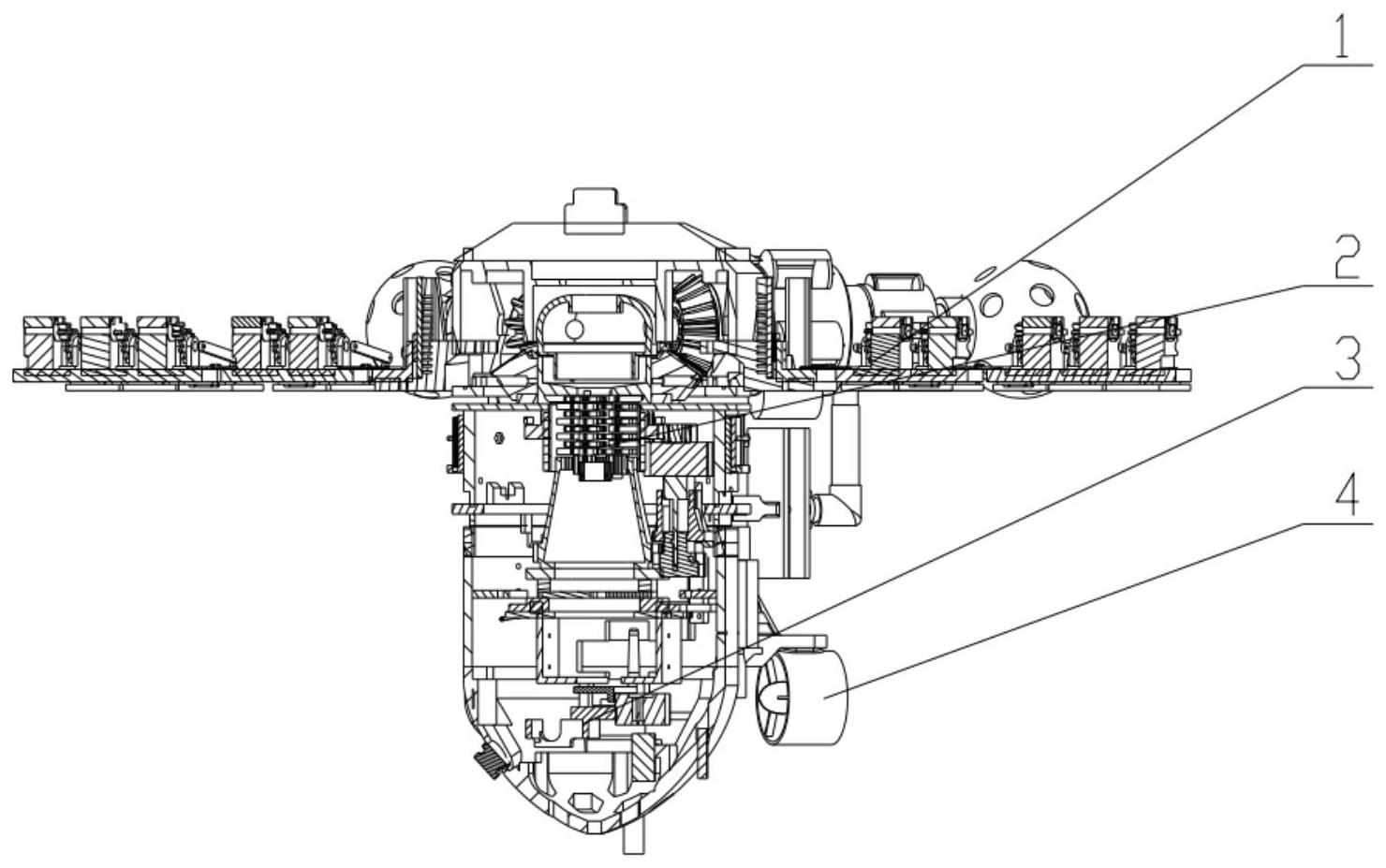
1、一种基于水光温储的物联网水体环护机器人,其特征在于:该机器人包括顶部收集发电层(1)、中部压缩传动层(2)、下部净化运输层(3)、底部驱动检测层(4);其特征在于所述顶部收集发电层由四根垃圾收集管(12)环状插入垃圾收集管支撑的圆孔内,再环状错位将四根四块水温光发电浮板(11)分别固定在垃圾收集管支撑(13)上;所述中部压缩传动层(2)通过多级齿轮传动结构(21)和内部粉碎装置(24)组成;净化运输层由药仓(31)、垃圾收集仓(32)、生物净化仓(33)组成;驱动检测层由ph传感器(41)、水下超声波(42)、温度传感器(43)、浊度传感器(44)和水下推进器(45)组成。
2、根据权利要求1所述的一种基于水光温储的物联网水体环护机器人,其特征在于:所述机器人整体外壳包括水温光发电浮板(11)、垃圾收集管(12)、垃圾收集管支撑(13)、雷达(51)、顶盖(52)、上盖(53)、轴承1号(54)、亚克力板(55)、中上层外壳(56)、温差支架(57)、温差发电片(58)、连接圆管(59)、中下层外壳(510)、灯管连接件(511)、l形管(512)、透明塑料管(514)、圆形支撑(515)、水下推进器连接件(516)、蜂窝净化半球(517)、门(518)、水下推进器(45),所述灯管连接件(511)通过尾部的孔与轴承1号(54)连接,另一端插入l形管(512)中,l形管(512)外部套上透明塑料管(514),内部插入紫外线灯管(513),透明塑料管(514)另一端插入圆形支撑(515),所述中上层外壳通过连接圆管(513)与中下层外壳(510)连接在一起,所述连接圆管(513)通过四块板与水下推进器连接件(516)贴合,所述水下推进器连接件(516)通过螺丝将中下层外壳(510)与蜂窝净化半球(517)连接在一起,门(518)通过两根圆棒与蜂窝净化半球(517)相连接。
3、根据权利要求1所述的一种基于水光温储的物联网水体环护机器人,其特征在于:所述水温光发电浮板(11)包括浮板前端(111)、浮板后端(112)、弹簧活页(113)、发电电机(114)、发电电机齿轮(115)、发电电机传动齿轮(116)、挡边轴承(117)、长连接杆(118)、光轴(119)、短连接杆(1110)、电机盖板(1111)、小浮板(1112)、温差发电片(58)、太阳能发电片(1113)、连接板(1114)、滑轨(1115)、滑块(1116)、固定块(1117)和活页(1118)。所述浮板前端(111)和浮板后端(112)通过弹簧活页(113)尾首相连,所述浮板前端(111)头部和连接板(1114)通过弹簧活页(113)连接,所述连接板(1114)插入固定块(1117)中,所述发电电机(114)装在浮板前端(111)和浮板后端(112)的上方凹槽处,所述电机盖板(1111)通过内置凹槽和孔固定在发电电机(114)的上方,所述发电电机齿轮(115)装在发电电机(114)的轴上,所述挡边轴承(117)一前一后分别嵌进浮板前端(111)的半圆状门的圆孔内和浮板后端(112)的半圆状门的圆孔内,所述光轴(119)插在挡边轴承(117)中将发电电机传动齿轮(116)和长连接杆(118)连在一起,所述短连接杆(1110)通过塞打螺丝一端连接长连接杆(118)另一端连接小浮板(1112)的凸起处,所述小浮板(1112)另一端通过弹簧活页(113)连接在浮板前端(111)和浮板后端(112)下方。
4、根据权利要求1所述的一种基于水光温储的物联网水体环护机器人,其特征在于:所述垃圾收集管(12)包括硝化细菌培养仓(121)、小星轮(122)、小型内侧单向棘轮(123)、小型外侧单向棘轮(124)、圆状支撑(125)、大星轮(126)、大型内侧单向棘轮(127)、大型外侧单向棘轮(128)、轴承2号(129)和圆锥齿轮杆(1210),所述大星轮(126)圆孔较小的一端先嵌入大型外侧单向棘轮(128),再嵌进大型内侧单向棘轮(127),另一端嵌入轴承2号(129),所述小星轮(122)圆孔较小的一端先嵌入小型外侧单向棘轮(124),再嵌进大型内侧单向棘轮(127),所述圆锥齿轮杆(1210)带有齿轮的一端圆孔处嵌进轴承,另一端按顺序大星轮(126)先嵌入,圆状支撑(125)再嵌入,小星轮(122)再嵌入,最后硝化细菌培养仓(121)嵌入。
5、根据权利要求1所述的一种基于水光温储的物联网水体环护机器人,其特征在于:所述多级齿轮传动结构(21)包括上层齿轮传动部分(22)和舵机传动部分(23),所述上层齿轮传动部分(22)包括中间引流(221)、传动伞齿轮(222)、封闭圆柱(223)、滚动轴承(224)、圆柱齿轮(225)、传动圆柱(226)、亚克力板(55)、轴承1号(54),所述传动伞齿轮(222)从上往下塞进封闭圆柱(223)中,通过传动伞齿轮(222)与封闭圆柱孔孔相对连接固紧,所述滚动轴承(224)从下往上嵌入封闭圆柱(223)并嵌进传动伞齿轮(222)的凹槽中,所述轴承1号(54)从下往上嵌入封闭圆柱(223)中,所述亚克力板(55)从下往上嵌入封闭圆柱(223)中,所述圆柱齿轮(225)从下往上嵌入封闭圆柱(223)中并通过多个孔与之连接。
6、根据权利要求1所述的一种基于水光温储的物联网水体环护机器人,其特征在于:所述舵机传动部分(23)包括舵机支撑(231)、轴承3号(232)、轴承4号(233)、双层齿轮杆(234)、舵机(235)、齿轮1(236)、连接齿轮(237),所述舵机传动部分(23)中间通过螺丝连接舵机(235),所述轴承3号(232)、轴承4号(233)先后嵌进舵机支撑(231)的圆孔中,所述双层齿轮杆(234)插入轴承3号(232)和轴承4号(233)的孔中,所述连接齿轮(237)从下往上嵌入双层齿轮杆(234)中。
7、根据权利要求1所述的一种基于水光温储的物联网水体环护机器人,其特征在于:所述内部粉碎装置(24)包括粉碎刀(241)、扇形支撑(242)、轴承6(243)、粉碎杆(244)、齿轮2(245)、齿轮3(246),所述粉碎刀(241)和扇形支撑(242)相互堆叠并通过粉碎杆(244)串在一起,所述齿轮2(245)从下往上嵌入粉碎杆(244)中,一共是四根,所述轴承6(243)从上往下卡进粉碎杆(244)中,所述齿轮3(246)与四个齿轮2(245)啮合,所述传动圆柱(226)的小口与四个齿轮2(245)啮合。
8、根据权利要求1所述的一种基于水光温储的物联网水体环护机器人,其特征在于:所述垃圾收集仓部分(32)包括轴承7(321)、打包中间外圈(322)、打包中间部分(323)、虹膜结构(324)、圆柱齿轮(325)、垃圾桶(326)、齿条(327)、滑块(328)、滑轨(329)、导轨连接桥(3210)、齿轮6(3211)、齿轮7(3212)、舵机(3213),所述轴承7(321)通过螺丝与打包中间外圆(322)相连接,所述打包中间部分(323)以小端指内并以五个相贴拼成圆形,再通过孔孔相对与虹膜结构(324)上方贴合,圆柱齿轮(325)从下方与虹膜结构(324)孔孔相对连接,垃圾桶(326)从下方与圆柱齿轮(325)孔孔相对连接,导轨连接桥(3210)通过四个支柱与垃圾桶(325)底部孔相对连接,导轨连接桥(3210)上方贴上滑轨(329),滑轨(329)上卡入滑块(328),齿条(327)通过螺丝连接在滑块(328)上。
9、根据权利要求1所述的一种基于水光温储的物联网水体环护机器人,其特征在于:所述药仓(31)贴合在垃圾桶(326)侧边,通过软管连通水质与药液。
10、根据权利要求1所述的一种基于水光温储的物联网水体环护机器人,其特征在于:所述生物净化仓(33)包括蜂窝净化半球(517),在蜂窝净化半球(517)中填入过滤棉和生化球。
11、根据权利要求1所述的一种基于水光温储的物联网水体环护机器人,其特征在于:所述垃圾收集仓(33)整体通过导轨连接桥(3210)与蜂窝净化半球(517)连接,舵机(235)固定于蜂窝净化半球(517)低处的方形缺口处,齿轮6(3211)装在舵机(235)上,舵机(235)固定在高处的方形缺口处,齿轮7(321)装在舵机(235)上,且齿轮7(321)与门(518)的尾部齿轮相啮合。
12、根据权利要求1所述的一种基于水光温储的物联网水体环护机器人,其特征在于:所述ph传感器(41)装在蜂窝净化半球(517)的门框所对面的圆孔内,所述水下超声波(42)装在蜂窝净化半球(517)门框侧边的大圆孔内,所述温度传感器(43)装在蜂窝净化半球(517)门框侧边的大圆孔内,所述浊度传感器(44)装在门框下方的圆孔内,所述水下推进器(45)倒置装在水下推进器连接件(516)的下方。
- 还没有人留言评论。精彩留言会获得点赞!