一种应用于AMHS系统的清洁机器人、及控制方法与流程
本发明涉及半导体设备,尤其是涉及一种应用于amhs系统的清洁机器人、及控制方法。
背景技术:
1、在半导体产品生产制造中,对于生产环境的洁净度具有很高的要求。为了满足洁净需要,在其生产和制造的过程中,多采用amhs系统对物料进行传递和运输。
2、amhs(automatic material handling system)中文译作自动物料搬送系统,也有称为天车系统,是一种能快速准确的按照工艺流程在生产设备之间搬送装载晶圆的载具运输系统。因其能减少晶圆的闲置时间,提高无尘室空间利用率,提高产品良率,减少人员误操作,降低人力成本等诸多优势,而被广泛应用于半导体硅片厂、芯片制造厂、芯片封装厂中。
3、amhs系统由硬件系统和软件系统构成,其硬件系统主要包括:空中悬挂式运行的无人搬送车oht(overhead hoist transport)、轨道及供电设备设备等。
4、其中,oht在空中导轨引导下沿着预定路径行走。物料移载台位于导轨下方,并对应于预定路径设置。物料搬运车在移动到对应于物料移载台的位置处,使物料升降移动,与物料移载台之间交接物料。
5、oht在导轨上行驶的过程中,由于oht的行驶轮会与导轨之间发生摩擦,从而产生尘屑(如图6所示),因此对导轨的清洁是一项必要的工作。对于amhs系统中的轨道进行清洁不同于地面轨道,因为amhs系统中的轨道为两条并行的轨道组合形成(如图1所示),轨道截面与地面轨道也有很大的差异(一侧具有挡板一侧悬空)常规适用于地面轨道清洁的设备在amhs上会受到极大的限制因素譬如整机的宽度、高度、清扫的速度、清扫角以及杂质收集等问题。因此现有的对于导轨的清洁还主要依赖于人工作业,但人工作业会带来诸多问题,如:影响生产效率、清洁度不佳、易造成二次污染、高空作业所存在安全隐患等等。
技术实现思路
1、本发明的目的在于提供一种应用于amhs系统的清洁机器人、及控制方法,以解决了现有技术中存在的对于导轨的清洁还主要依赖于人工作业,但人工作业会带来诸多问题,如:影响生产效率、清洁度不佳、易造成二次污染、高空作业所存在安全隐患等等的技术问题。
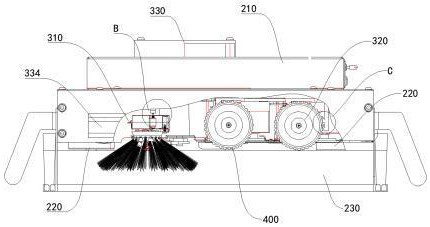
2、第一个方面,本发明实施例提供了一种应用于amhs系统的清洁机器人,其特征在于,包括:
3、载体,所述载体内部为中空的容纳腔室;
4、行驶驱动组件,所述行驶驱动组件用于带动所述载体沿洁净搬运系统轨道路径的延伸方向进行行驶,且所述行驶驱动组件设置于所述载体底部区域;
5、导向轮,至少一对所述导向轮分别安装于所述载体底部区域的两侧,与轨道侧壁抵接;
6、清扫组件,所述清扫组件包括第一维护部、第二维护部和采集部,所述第一维护部位于所述载体两侧,用于对轨道上大颗粒杂质进行收拢,所述第一维护部通过角度调节组件可活动设置于所述载体底部区域,且所述第一维护部至少部分位于所述载体的容纳腔内;
7、所述角度调节组件一端与所述载体连接,另一端与所述第一维护部铰接,且所述角度调节组件可调节所述第一维护部相对于行进面的切入夹角;
8、所述采集部设置于所述载体容纳腔内,且所述采集部的入口分别位于所述载体宽度方向的两侧,所述第一维护部可将轨道上的杂质收拢与所述入口处;
9、控制器,控制器分别与所述第一维护部、所述第二维护部和所述采集部以及所述行驶驱动组件电连接或无线连接。
10、优选的,所述第一维护部包括驱动电机,所述驱动电机的输出端可拆卸安装有转动盘,所述转动盘的外缘处周向均匀设置有刷毛,所述刷毛与所述转动盘之间设置有夹角。
11、优选的,所述转动盘半径为r,且所述转动盘最低点与行进面之间存在间距h,所述刷毛长度为l,所述刷毛与行进面之间存在夹角a,所述h小于所述l的长度,且所述h至少满足h<l,所述转动盘至少满足0°<a<90°。
12、优选的,所述采集部包括位于所述载体容纳腔内的采集盒和设置于所述采集盒一侧的负压产生装置,且所述采集盒与所述负压产生装置之间设置有过滤装置,避免杂质被吸入至所述负产生装置内;所述采集盒两侧均设置有与外部相连通的第一吸入口和第二吸入口;
13、所述第一吸入口和所述第二吸入口处均通过导管连接有吸头组件,且所述吸头组件吸入端位与轨道行进面之间存在间隙,所述吸头组件的导入口朝向所述行进面开设;
14、在所述负压产生装置作用下,吸头组件、导管、采集盒之间形成负压,对导轨面上的杂质颗粒进行吸附。
15、优选的,所述过滤装置具体为过滤栅格。
16、优选的,所述第二维护部包括,所述第二维护部包括辊擦和用于驱动所述辊擦旋转的驱动电机,所述辊擦与所述轨道行进面相切,且所述辊擦的转向与所述行进轮转向相反,在所述驱动电机驱动下所述辊擦将行进行进面上的杂质向上卷起;
17、优选的,所述辊擦的外侧设置有中空的刮除组件,所述刮除组件内嵌于所述载体一侧,且所述刮除组件与所述采集盒相连通,所述刮除组件的一侧设置有凸起部,所述凸起部与所述辊擦的外缘处抵接,当所述辊擦转动时,所述凸起部可将所述辊擦上杂质进行刮除,所刮除下的杂质颗粒经中空的刮除组件被吸入到采集盒内。
18、第二个方面,本发明实施例提供了应用于amhs系统的清洁机器人的控制方法,
19、基于权上述的清洁机器人进行实施,所述方法包括:
20、实时接收工作指令信息;
21、对所述工作指令信息进行解析,以确定是否包含第二维护部参与辅助清洁的子功能信息;
22、当确定所述工作指令信息中包含第二维护部参与辅助清洁的子功能信息时,确定与所述工作指令信息相关联的清洁模式,所述清洁模式包括第一级清洁模式和二级清洁模式;
23、当所述清洁模式一级清洁模式时,所述第一维护部参与清洁;
24、当所述清洁模式为二级清洁模式时,所述第一维护部以及第二维护部均参与清洁。
25、第三个方面,本发明实施例提供了一种应用于amhs系统的清洁机器人的控制系统,包括
26、接收模块:用于实时接收工作指令信息;
27、解析模块:用于对所述工作指令信息进行解析,以确定是否包含第二维护部参与辅助清洁的子功能信息;
28、确定模块:用于当确定所述工作指令信息中包含第二维护部参与辅助清洁的子功能信息,确定与所述工作指令信息相关联的清洁模式,所述清洁模式包括一级清洁模式和二级清洁模式;
29、第一生成模块:用于当所述清洁模式为一级清洁模式,生成控制信号并将所述控制信号发送给控制器驱动第一维护部和采集部执行清洁作业;
30、第二生成模块:用于当所述清洁模式为二级清洁模式,生成控制信号并将所述控制信号发送给控制器驱动第一维护部、第二维护部和采集部均执行清洁作业。
31、最后,还提供了一种控制器,包括存储器和处理器,所述存储器上存储有能够被处理器加载并执行上述的应用于amhs系统给的清洁机器人的控制方法的计算机程序。
32、本发明实施例至少具有以下技术效果:
33、本设计提供了一种应用于amhs系统的清洁机器人、及控制方法,能够运行在amhs系统的导轨上对轨道进行清洁维护,同时本设计能够根据用户指令选择不同的清洁模式,比如仅需要对amhs系统中的轨道进行日常清洁维护时,只启动通过第一维护部和采集部对导轨的行进面进行清洁,将轨道行进面上的杂质颗粒通过扫刷清扫并配合采集部所产生的负压进行吸附,能够对较大的杂质颗粒进行处理,实现日常维护的效果,并且为了能够对轨道进行更好的清洁效果,且本设计的第一维护部的清扫角度能够进行调节,增加清扫有效区域,降低耗材损耗;当需要对轨道进行更深一步的维护保养时,第二维护部对第一维护部清扫清洁之后的部位进行更进一步的擦拭,对第一维护部无法处理到的小的杂质颗粒或者遗漏的大的杂质颗粒进行处理,同时为了避免擦拭部位的杂质附着在擦拭面而降低擦拭的效果,故在辊擦的后侧设置真空的刮除组件对辊擦表面进行处理,保持辊擦的擦拭效果,实现自动且高效的导轨清洁。
- 还没有人留言评论。精彩留言会获得点赞!