一种光伏清扫机器人自动搬运系统的制作方法
本技术涉及太阳能光伏阵列维护,进一步地涉及一种光伏清扫机器人自动搬运系统。
背景技术:
1、光伏电站,是一种利用太阳光能、采用特殊材料诸如晶硅板、逆变器等电子元件组成的发电体系,其与电网相连,并向电网输送电力。
2、由于光伏电站的光伏阵列设置于户外,为减少灰尘、污渍等对光伏电站发电效率的影响,行业内大多采用光伏清扫机器人对光伏阵列进行定期清扫。目前,行业内的光伏清扫机器人基本上已实现在一块或多块连续的同倾角的光伏阵列上的清扫,也有部分在多排光伏阵列间设置移动的搬运车,通过搬运车实现光伏清扫机器人在多排光伏阵列之间的跨越清扫。但是,发明人认为,现有的搬运车在搬运光伏清扫机器人时容易发生晃动,结构稳定性较差,存在待改进之处。
技术实现思路
1、本技术的目的在于提供一种光伏清扫机器人自动搬运系统,用以辅助光伏清扫机器人实现在不同排光伏阵列之间跨越清扫的同时,提升该自动搬运系统整体结构的稳定性,延长其使用寿命。
2、本技术提供的技术方案如下:
3、本技术提供一种光伏清扫机器人自动搬运系统,包括:
4、运行导轨,所述运行导轨铺设于若干排光伏阵列的同一端,以形成光伏清扫机器人往返若干排所述光伏阵列的运行通道;
5、光伏清扫机器人;
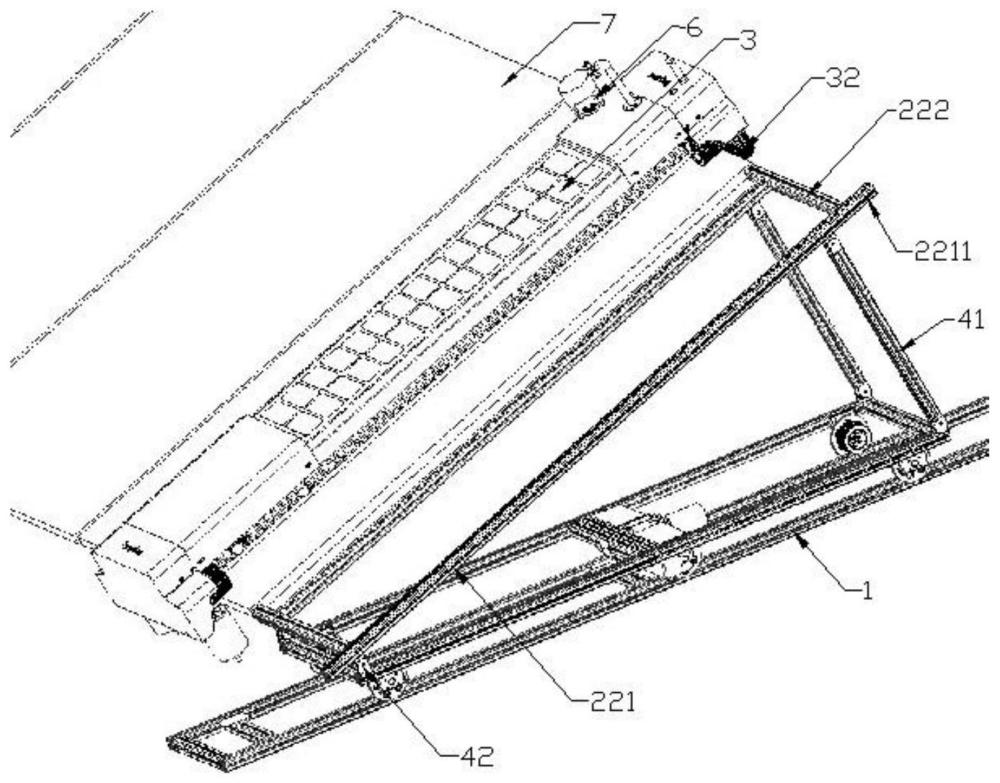
6、移动运输车,所述移动运输车沿所述运行导轨行走;所述移动运输车包括底架与上斜架,所述光伏清扫机器人装载于所述上斜架;
7、调节连接件,所述调节连接件设置于所述底架与所述上斜架之间,连接所述底架与所述上斜架,并调节所述上斜架的倾斜角度;
8、所述调节连接件至少设置有三个,任一所述调节连接件均连接所述底架周侧与所述上斜架周侧的对应位置,且多个所述调节连接件关于所述底架的长度方向的中线呈对称设置。
9、通过本技术提供的一种光伏清扫机器人自动搬运系统,初始状态时,光伏清扫机器人装载于移动运输车的上斜架上;当光伏清扫机器人的定时启动命令下发后,移动运输车沿运行导轨行走,带动光伏清扫机器人向待清洁光伏阵列的端部靠近;当移动运输车与待清洁光伏阵列的上下边界对齐后,调节连接件调节上斜架的倾斜角度,使之与待清洁光伏阵列的倾斜角度保持一致;随后,光伏清扫机器人启动,沿待清洁光伏阵列的延伸方向自上斜架转移至待清洁光伏阵列上,并对相应光伏阵列做清扫作业。当光伏清扫机器人完成对应排光伏阵列的清扫作业并返回上斜架后,移动运输车继续沿运行导轨行走,直至与下一排光伏阵列的上下边界对齐,而后,光伏清扫机器人下一排沿待清洁光伏阵列的延伸方向自上斜架转移至相应待清洁光伏阵列上,并重复上述清扫动作;如此循环,直至完成光伏阵列内全部光伏阵列的清扫作业。
10、通过将多个调节连接件支撑于底架与上斜架周侧的边缘位置,并使多个调节连接件关于底架沿自身进给方向的中线对称设置,代替相关技术中将调节连接件设置于搬运车中部的操作,以此提升移动运输车整体结构的稳定性,从而减少光伏清扫机器人在移动运输车与光伏阵列之间跨越时因移动运输车承重位置改变导致移动运输车晃动的情况发生,有效提升移动运输车搬运光伏清扫机器人过程的稳定性,即提升该光伏清扫机器人自动搬运系统的稳定性,同时,有利于延长其使用寿命。
11、在一些实施方式中,所述底架与所述上斜架均呈方框结构;所述调节连接件包括电动推杆,所述电动推杆在所述底架的四角均设置有一根,且所述电动推杆的导管套与所述底架固定连接,所述电动推杆的内杆与所述上斜架宽度方向的边缘转动连接。
12、通过本技术提供的一种光伏清扫机器人自动搬运系统,具体作业时,位于底架长度方向两端的电动推杆分别进行升降动作,以此调整上斜架的倾斜角度,即调整光伏清扫机器人的倾斜角度,调整连接件结构简单,操作方便,有助于提升该光伏清扫机器人自动搬运系统的生产便捷性。
13、在一些实施方式中,所述底架设置有用于驱动所述移动运输车行走的驱动轮,所述底架上还设置有用于驱动所述驱动轮转动的驱动件;所述驱动件包括双出轴电机,所述双出轴电机的壳体与所述底架固定连接;所述驱动轮与所述双出轴电机的输出轴一一对应,并同轴传动连接;
14、所述底架长度方向的两端均设置有行走轮组,所述驱动轮设置于两所述行走轮组之间。
15、通过本技术提供的一种光伏清扫机器人自动搬运系统,借助双出轴电机驱动驱动轮转动,以此实现移动运输车行走,驱动结构简单,制造方便,有助于节省企业生产成本。
16、在一些实施方式中,任一所述驱动轮与所述双出轴电机的对应输出轴之间均设置有联轴器。
17、通过本技术提供的一种光伏清扫机器人自动搬运系统,用联轴器联接驱动轮与双出轴电机的对应输出轴,有助于保证双出轴电机对驱动轮的稳定驱动,进而提升移动运输车搬运光伏清扫机器人时的平稳性。
18、在一些实施方式中,还包括总控制器,所述运行导轨上设置有rfid标签,所述底架上对应所述rfid标签设置有rfid读写器;所述rfid标签、所述rfid读写器、所述双出轴电机均同所述总控制器电性连接;
19、所述rfid读写器用于在所述移动运输车行走时识别所述rfid标签,使所述光伏清扫机器人与对应所述光伏阵列上下边界平齐,进而使所述移动运输车停止行走。
20、通过本技术提供的一种光伏清扫机器人自动搬运系统,具体作业时,光伏清扫机器人装载于移动运输车的上斜架上,当光伏清扫机器人的定时启动命令下发后,双出轴电机启动,驱动移动运输车沿运行导轨行走,待rfid读写器检测到rfid标签后,双出轴电机关闭,移动运输车停止行走,进而使光伏清扫机器人与待清扫光伏阵列对应,以便光伏清扫机器人从上斜架跨越至清扫光伏阵列上;采用rfid标签与rfid读写器实现移动运输车与待清扫光伏阵列的定位,定位结构简单,设置方便,有助于进一步提升该光伏清扫机器人自动搬运系统的生产便捷性。
21、在一些实施方式中,所述光伏清扫机器人上设置有用于识别对应所述光伏阵列上下边界与倾斜角度的视觉系统,所述视觉系统、所述双出轴电机均同所述总控制器电性连接。
22、具体作业时,当光伏清扫机器人的定时启动命令下发后,双出轴电机启动,驱动移动运输车沿运行导轨行走,当视觉系统识别待清洁光伏阵列的上下边界到达视野的预设位置后,双出轴电机关闭,移动运输车停止行走,从而使光伏清扫机器人与待清扫光伏阵列的上下边界对齐,结合rfid标签与rfid读写器的定位作用,有效提升移动运输车相对待清洁光伏阵列定位的准确性。
23、在一些实施方式中,所述光伏清扫机器人上设置有角度检测装置,所述角度检测装置同所述电动推杆电性连接;用于在所述光伏清扫机器人与对应所述光伏阵列上下边界平齐时检测所述光伏清扫机器人的倾斜角度,进而使所述电动推杆调节所述上斜架的倾斜角度。
24、在一些实施方式中,所述角度检测装置包括六轴陀螺仪,所述六轴陀螺仪集成于所述光伏清扫机器人的控制板上,用于检测所述光伏清扫机器人停放于所述上斜架上时的倾斜角度。
25、通过本技术提供的一种光伏清扫机器人自动搬运系统,实际作业时,待光伏清扫机器人与待清扫光伏阵列的上下边界对齐后,视觉检测装置识别待清扫光伏阵列的倾斜角度,并将角度信息传递至总控制器;与此同时,六轴陀螺仪检测光伏清扫机器人及承载光伏清扫机器人的上斜架的倾斜角度,并将相应角度信息传递至总控制器,总控制对比两个角度信息并做出判断,即当两个角度信息不一致时,向电动推杆反馈相应控制信号,使电动推杆运行,调整上斜架的倾斜角度,使其与待清扫光伏阵列的倾斜角度保持一致。通过设置于光伏清扫机器人上的六轴陀螺仪及视觉检测装置,分别检测光伏清扫机器人、上斜架的倾斜角度及待清扫光伏阵列的倾斜角度,并结合总控制器控制电动推杆运行,以此实现光伏清扫机器人倾斜角度与待清扫光伏阵列倾斜角度的适配,调节系统结构简单,制造方便,有助于进一步降低企业生产成本。
26、在一些实施方式中,所述上斜架包括两根支撑杆,两根所述支撑杆呈平行间隔设置,且所述电动推杆的内杆与对应所述支撑杆转动连接;还包括两根连接杆,两根所述连接杆呈平行间隔设置,且分别固定连接于所述支撑杆长度方向的两端;
27、所述光伏清扫机器人下侧对应任一所述连接杆均设置有转轮组,所述转轮组的转轮分别沿对应所述连接杆行走。
28、通过本技术提供的一种光伏清扫机器人自动搬运系统,利用支撑杆与连接杆设置上斜架,并利用连接杆支撑光伏清扫机器人行走,简化上斜架及光伏清扫机器人在上斜架上的搭载结构,有效降低该光伏清扫机器人自动搬运系统的生产难度,节省企业生产成本。
29、在一些实施方式中,所述光伏清扫机器人上位于两组所述转轮组相互背离的位置均设置有导向轮,任一所述导向轮的外圆面分别抵接对应所述连接杆的外侧壁,并沿所述连接杆的长度方向与对应所述连接杆滚动连接;
30、远离所述光伏阵列一侧的所述支撑杆的两端均颜色有限位杆,任一所述导向轮的外圆面均与所述限位杆的侧壁抵接。
31、通过本技术提供的一种光伏清扫机器人自动搬运系统,光伏清扫机器人装载于移动运输车的上斜架上时,导向轮的外圆面抵接对应连接杆的外侧壁,并沿连接杆的长度方向与对应连接杆滚动连接,以此实现光伏清扫机器人的转轮与连接杆的稳定配合;当光伏清扫机器人沿连接杆的长度方向向远离光伏阵列的一侧运行时,导向轮的外圆面抵接限位杆,以此将光伏清扫机器人的转轮限制于连接杆上,减少光伏清扫机器人从上斜架远离光伏阵列的一侧脱离上斜架的情况发生,有效保证光伏清扫机器人在移动运输车上的稳定搭载,同时,结构简单,便于生产制造,有效降低企业生产成本。
32、与现有技术相比,本技术所提供的光伏清扫机器人自动搬运系统具有以下至少一条有益效果:
33、1、通过在移动运输车的底架与上斜架之间设置电动推杆,并将电动推杆设置在底架与上斜架周侧的对应位置,同时使多个电动推杆关于底架长度方向的中线呈对称设置,代替相关技术中将调节连接件设置于搬运车中部的操作,以此提升移动运输车整体结构的稳定性,从而减少光伏清扫机器人在移动运输车与光伏阵列之间跨越时移动运输车晃动的情况发生,有效提升移动运输车搬运光伏清扫机器人过程中的稳定性,并有助于延长其使用寿命;同时,由于光伏电站的选址、地形等问题,光伏电站的不同排光伏阵列的倾角设置也不尽相同,通过电动推杆调整上斜架的倾斜角度,即调整光伏清扫机器人的倾斜角度与待清扫光伏阵列保持一致,从而使一台光伏清扫机器人同时满足不同倾角光伏阵列的清扫要求,有效减少光伏清扫机器人的设置数量,降低企业对光伏清扫机器人的成本投入;
34、2、利用rfid标签与rfid读写器确定移动运输车的位置,同时,结合视觉系统识别待清洁光伏阵列的上下边界,以此实现移动运输车与待清扫光伏阵列的定位,采用双重定位手段,有效提升定位准确度,从而保证光伏清扫机器人在移动运输车与待清扫光伏阵列之间的稳定跨越;
35、3、通过设置于光伏清扫机器人上的六轴陀螺仪,检测光伏清扫机器人及上斜架的倾斜角度,并结合视觉系统识别待清洁光伏阵列的倾斜角度,再通过总控制器控制电动推杆运行,以此将光伏清扫机器人倾斜角度与待清扫光伏阵列适配,调节系统结构简单,有助于保证该光伏清扫机器人自动搬运系统的生产便捷性,进而降低企业生产成本;
36、4、借助导向轮实现光伏清扫机器人转轮与连接杆的稳定配合,借助限位杆将光伏清扫机器人的转轮限制于连接杆上,以此实现光伏清扫机器人在移动运输车上的稳定搭载,结构简单,生产方便,有效节省企业生产成本。
- 还没有人留言评论。精彩留言会获得点赞!