磁性控制多头式自适应点胶机器人的制作方法
[0001]
本发明涉及一种磁性控制多头式自适应点胶机器人。
背景技术:
[0002]
目前,在芯片卡的封装作业工序中,常常用到点胶设备进行注胶使得芯片和卡基粘接封装在一起。但是现有的点胶设备基本都是单头式结构,对于面积较大的芯片进行点胶作用时,需要采用轨迹移动方式点胶,效率低下,且胶液分散效果不理想。
技术实现要素:
[0003]
本发明的目的在于克服以上所述的缺点,提供一种磁性控制多头式自适应点胶机器人。
[0004]
为实现上述目的,本发明的具体方案如下:一种磁性控制多头式自适应点胶机器人,包括点胶支架、位置检测固定装置以及点胶装置;所述位置检测固定装置设于点胶支架上;所述位置检测固定装置用于检测待点胶的芯片的尺寸大小、定位固定住待点胶的芯片以及控制点胶装置点胶作业的开闭;所述点胶装置设于点胶支架上并位于位置检测固定装置的上方,所述点胶装置用于将胶液点在位置检测固定装置上固定的待点胶的芯片上;所述点胶装置包括点胶基座和多个呈阵列分布设于点胶基座上的磁性控制阀单元,所述点胶基座上开设有胶仓和多个点胶腔体,所述多个点胶腔体与多个磁性控制阀单元一一对应,所述点胶基座上还一一对应每个点胶腔体分别设置有与点胶腔体连通的点胶口,每个所述磁性控制阀单元一一对应设于点胶腔体内、并将点胶腔体分隔成上腔和下腔,所述点胶腔体的上腔与外界大气连通,每个所述磁性控制阀单元均包括中空且下端封闭的封胶针、永磁体和压气活塞,所述永磁体和压气活塞均套设于封胶针上,且所述压气活塞靠近封胶针的下端设置,所述封胶针的上端伸入胶仓内,所述封胶针的下端设有用于将胶液注入点胶腔体的下腔内的通孔,所述封胶针的下端伸入点胶口内,当点胶装置处于封堵状态时,所述封胶针封堵住点胶腔体的下腔与点胶口之间的连通,当点胶装置处于点胶状态时,所述封胶针使点胶腔体的下腔与胶仓连通并使得点胶腔体的下腔与点胶口之间连通;所述位置检测固定装置包括检测基座和多个呈阵列分布设于检测基座上的电磁检测固定单元,多个所述电磁检测固定单元与多个磁性控制阀单元上下一一对应设置,所述电磁检测固定单元包括电磁铁、位置传感器和静电吸附环,所述电磁铁嵌设于容置腔内,所述位置传感器设于电磁铁的顶部,所述静电吸附环套设于位置传感器上。
[0005]
其中,多个所述磁性控制阀单元呈矩阵阵列排布在点胶基座上,多个所述电磁检测固定单元呈矩阵阵列排布在检测基座上。
[0006]
其中,所述点胶基座包括有内隔板和进胶盖板,所述点胶基座设有容置槽,所述点胶腔体设于容置槽的底部,所述内隔板固定在容置槽的底部,所述进胶盖板设于容置槽的开口端,所述容置槽、内隔板、进胶盖板之间形成胶仓,所述封胶针的上端穿过内隔板后与
胶仓连通。
[0007]
其中,所述磁性控制阀单元还包括封胶弹簧,所述封胶弹簧套设于封胶针的上端,所述封胶弹簧的两端分别与内隔板、永磁体抵接。
[0008]
其中,所述位置传感器为超声波传感器。
[0009]
其中,还包括间距调节气囊,所述间距调节气囊设于进胶板与点胶支架之间,并用于调节点胶装置与位置检测固定装置之间的间距。
[0010]
其中,所述点胶基座上还设有连接通道,所述连接通道设于点胶口的侧边,所述连接通道用于在点胶装置处于点胶状态时将点胶腔体的下腔与点胶口之间连通。
[0011]
本发明的有益效果为:本发明利用多个阵列分布的电磁检测固定单元与多个阵列分布的磁性控制阀单元上下一一对应,并利用电磁检测固定单元控制磁性控制阀单元动作,从而实现控制点胶作业的开闭,形成多头组合式点状点胶作业,点胶的效率大大提高,同时使得胶液分散性好。
[0012]
同时本发明利用多个阵列分布的电磁检测固定单元检测出芯片的尺寸大小,并实际根据芯片的大小驱动对应的磁性控制阀单元开闭点胶,从而能够对芯片的规格、位置、方向均能自动适应,无需对芯片进行精确定位,使得芯片位置偏差容错率更大。
附图说明
[0013]
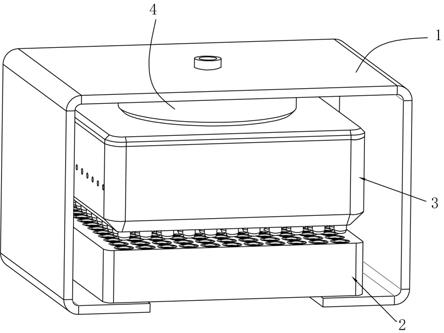
图1是本发明的立体图;图2是本发明的剖视图;图3是图2中i处的局部结构放大示意图;图4是本发明另一视角的剖视图;图5是本发明的点胶基座的剖面示意图;附图标记说明:点胶支架-1;位置检测固定装置-2;检测基座-21;电磁检测固定单元-22;电磁铁-221;位置传感器-222;静电吸附环-223;点胶装置-3;点胶基座-31;胶仓-311;点胶腔体-312;点胶口-313;内隔板-314;进胶盖板-315;连接通道-316;磁性控制阀单元-32;封胶针-321;通孔-3211;永磁体-322;压气活塞-323;封胶弹簧-324;间距调节气囊-4。
具体实施方式
[0014]
下面结合附图和具体实施例对本发明作进一步详细的说明,并不是把本发明的实施范围局限于此。
[0015]
如图1至图5所示,本实施例所述的一种磁性控制多头式自适应点胶机器人,包括点胶支架1、位置检测固定装置2以及点胶装置3;所述位置检测固定装置2设于点胶支架1上;所述位置检测固定装置2用于检测待点胶的芯片的尺寸大小、定位固定住待点胶的芯片以及控制点胶装置3点胶作业的开闭;所述点胶装置3设于点胶支架1上并位于位置检测固定装置2的上方,所述点胶装置3用于将胶液点在位置检测固定装置2上固定的待点胶的芯片上;所述点胶装置3包括点胶基座31和多个呈阵列分布设于点胶基座31上的磁性控制阀单元32,所述点胶基座31上开设有胶仓311和多个点胶腔体312,所述多个点胶腔体312与多个磁性控制阀单元32一一对应,所述点胶基座31上还一一对应每个点胶腔体312分别设置有
与点胶腔体312连通的点胶口313,每个所述磁性控制阀单元32一一对应设于点胶腔体312内、并将点胶腔体312分隔成上腔和下腔,所述点胶腔体312的上腔与外界大气连通,每个所述磁性控制阀单元32均包括中空且下端封闭的封胶针321、永磁体322和压气活塞323,所述永磁体322和压气活塞323均套设于封胶针321上,且所述压气活塞323靠近封胶针321的下端设置,所述封胶针321的上端伸入胶仓311内,所述封胶针321的下端设有用于将胶液注入点胶腔体312的下腔内的通孔3211,所述封胶针321的下端伸入点胶口313内,当点胶装置3处于封堵状态时,所述封胶针321封堵住点胶腔体312的下腔与点胶口313之间的连通,当点胶装置3处于点胶状态时,所述封胶针321使点胶腔体312的下腔与胶仓311连通并使得点胶腔体312的下腔与点胶口313之间连通;所述位置检测固定装置2包括检测基座21和多个呈阵列分布设于检测基座21上的电磁检测固定单元22,多个所述电磁检测固定单元22与多个磁性控制阀单元32上下一一对应设置,所述电磁检测固定单元22包括电磁铁221、位置传感器222和静电吸附环223,所述电磁铁221嵌设于容置腔内,所述位置传感器222设于电磁铁221的顶部,所述静电吸附环223套设于位置传感器222上。
[0016]
本实施例中,优选地,多个所述磁性控制阀单元32呈矩阵阵列排布在点胶基座31上,多个所述电磁检测固定单元22呈矩阵阵列排布在检测基座21上。如此设置,点胶效率更高,芯片位置偏差容错率更大。
[0017]
工作时,将待点胶的芯片放置在检测基座21上,与芯片接触的各个电磁检测固定单元22的静电吸附环223吸附固定住芯片,同时电磁检测固定单元22的位置传感器222检测芯片的位置信息,并将位置信息反馈回外界控制系统,然后外界控制系统根据芯片的位置信息检测出芯片的尺寸大小,然后控制对应的电磁检测固定单元22的电磁铁221通电,即与芯片接触的电磁检测固定单元22中的电磁铁221工作,而未与芯片接触的电磁检测固定单元22中的电磁铁221不通电,使得通电的电磁铁221产生极性与磁性控制阀单元32中的永磁体322相同的磁场,各个通电工作的电磁检测固定单元22各自对与其上下一一对应的磁性控制阀单元32之间产生排斥作用,即电磁铁221对永磁体322产生排斥力,使得各个磁性控制阀单元32中的永磁体322带动封胶针321和压气活塞323上移,直至封胶针321上的通孔3211与点胶腔体312的下腔连通,且点胶腔体312的下腔与点胶口313连通,然后胶仓311内的胶液从封胶针321内通过通孔3211进入点胶腔体312内,然后胶液从点胶腔体312内进入点胶口313,接着从点胶口313落入芯片上,如此进行点胶过程,形成多头式同步点胶操作,点胶完成后,对电磁铁221反向通电,使得电磁铁221产生极性与永磁体322相反的磁场,从而对永磁体322产生磁性吸附力,永磁体322带动封胶针321下探,使得封胶针321上的通孔3211与点胶腔体312的下腔不连通以及点胶腔体312的下腔与点胶口313不连通,从而堵住胶液从点胶口313流出。
[0018]
本实施例利用多个阵列分布的电磁检测固定单元22与多个阵列分布的磁性控制阀单元32上下一一对应,并利用电磁检测固定单元22控制磁性控制阀单元32动作,从而实现控制点胶作业的开闭,形成多头组合式点状点胶作业,点胶的效率大大提高,同时使得胶液分散性好。
[0019]
同时本实施例利用多个阵列分布的电磁检测固定单元22检测出芯片的尺寸大小,并实际根据芯片的大小驱动对应的磁性控制阀单元32开闭点胶,从而能够对芯片的规格、
位置、方向均能自动适应,无需对芯片进行精确定位,使得芯片位置偏差容错率更大。
[0020]
基于上述实施例的基础上,进一步地,所述点胶基座31包括有内隔板314和进胶盖板315,所述点胶基座31设有容置槽,所述点胶腔体312设于容置槽的底部,所述内隔板314固定在容置槽的底部,所述进胶盖板315设于容置槽的开口端,所述容置槽、内隔板314、进胶盖板315之间形成胶仓311,所述封胶针321的上端穿过内隔板314后与胶仓311连通。具体地,将胶液存储在胶仓311内,以便能够同时为各个磁性控制阀单元32提高胶液,无需单独控制胶液单独进入各个磁性控制阀单元32;优选地,进胶板上设有进胶口,以便于将胶液注入胶仓311存储。
[0021]
基于上述实施例的基础上,进一步地,所述磁性控制阀单元32还包括封胶弹簧324,所述封胶弹簧324套设于封胶针321的上端,所述封胶弹簧324的两端分别与内隔板314、永磁体322抵接。
[0022]
实际使用时,在永磁体322带动封胶针321上移时,永磁体322压缩封胶弹簧324,点胶腔体312的下腔的体积增大,在封胶针321的通孔3211与点胶腔体312的下腔连通时,胶液进入点胶腔体312的下腔,然后通过点胶口313进行点胶作业,在点胶作业完成后,永磁体322在电磁铁221的磁性吸附力以及封胶弹簧324的弹力作用下,带动封胶针321快速下探,从而使得封胶针321的下端快速封堵住点胶口313出胶,避免胶液溢出过多。
[0023]
基于上述实施例的基础上,进一步地,所述位置传感器222为超声波传感器。利用超声波传感器方向性好、能够成为射线而定向传播的特点,提高芯片位置信息的精度。
[0024]
基于上述实施例的基础上,进一步地,还包括间距调节气囊4,所述间距调节气囊4设于进胶板与点胶支架1之间,并用于调节点胶装置3与位置检测固定装置2之间的间距。如此设置,便于芯片的取放操作。
[0025]
基于上述实施例的基础上,进一步地,所述点胶基座31上还设有连接通道316,所述连接通道316设于点胶口313的侧边,所述连接通道316用于在点胶装置3处于点胶状态时将点胶腔体312的下腔与点胶口313之间连通,其余结构与上述实施例的结构相同。
[0026]
实际使用时,在封胶针321上移过程中,封胶针321首先打开连接通道316与点胶口313之间的连通,进而通过连接通道316贯通点胶腔体312的下腔和点胶口313,此时点胶腔体312的下腔经由点胶口313、连接通道316吸气,即空气进入点胶腔体312的下腔内,随着封胶针321的上移,封胶针321的通孔3211与点胶腔体312的下腔连通,胶仓311内的胶液从封胶针321内通过通孔3211进入点胶腔体312的下腔内,由于胶液的密度大于空气的密度,因此进入的空气位于胶液的上方,然后封胶针321在永磁体322带动下下探,由于点胶腔体312的下腔内并未充满胶液,胶液的上方存在一定量的空气,然后在压气活塞323的加压下,压缩点胶腔体312的下腔内的空气,压气活塞323通过压缩空气间接推动胶液经由连接通道316进入点胶口313并喷出至芯片表面,由于点胶口313内胶液尾部为压缩空气,当胶液完全喷出后,压缩空气对点胶口313进行隔离冲刷,使得点胶结束后点胶口313与芯片上胶液并未接触,破坏了拉丝形成的条件,有效避免了拉丝现象的发生,从而解决了点胶结束后点胶口313上移时容易出现拉丝现象的问题。
[0027]
以上所述仅是本发明的一个较佳实施例,故凡依本发明专利申请范围所述的构造、特征及原理所做的等效变化或修饰,包含在本发明专利申请的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1