一种带机械臂的自动化方舱式喷涂系统的制作方法
[0001]
本实用新型涉及喷涂领域,特别涉及一种带机械臂的自动化方舱式喷涂系统。
背景技术:
[0002]
喷涂通过喷枪或碟式雾化器,借助于压力或离心力,分散成均匀而微细的雾滴,施涂于被涂物表面的涂装方法。可分为空气喷涂、无空气喷涂、静电喷涂以及上述基本喷涂形式的各种派生的方式,如大流量低压力雾化喷涂、热喷涂、自动喷涂、多组喷涂等,目前,市面上的方舱式喷涂装置通常是使用机械手臂固定待喷涂的零部件后进行喷涂,工厂和生产车间应对生产需要,在使用过程中需要拆卸或者更换机械手臂,目前工厂和生产车间的方舱式喷涂装置内的机械手臂大多通过螺栓固定,安装拆卸不方便,因此,提供一种拆卸方便的带机械臂的自动化方舱式喷涂系统就成为急需解决的问题了。
技术实现要素:
[0003]
(一)要解决的技术问题
[0004]
为了解决现有技术的上述问题,本实用新型提供一种拆卸方便的带机械臂的自动化方舱式喷涂系统。
[0005]
(二)技术方案
[0006]
为了达到上述目的,本实用新型采用的主要技术方案包括:
[0007]
一种带机械臂的自动化方舱式喷涂系统,包括喷涂方舱,所述喷涂方舱,所述喷涂方舱内壁顶部设有喷嘴,所述喷嘴连接涂料罐,且所述涂料罐位于所述喷涂方舱的顶部,所述喷涂方舱内壁两侧均转动安装有转座,所述转座相互远离的一端上均固定连接有转轴,所述转轴上均设有第一转轮,所述第一转轮连接驱动装置,所述转座相互靠近的一端内均设有可拆卸固定装置,所述可拆卸固定装置内安装有机械臂;所述可拆卸固定装置包括呈中空状柱体的固定筒体,所述固定筒体内的圆心处固定设有定位柱,所述定位柱上套设第一弹簧,所述固定筒体的开口处相对设置有固定槽,所述固定槽内滑动安装有拉杆,所述拉杆上套设第二弹簧,所述拉杆在所述第二弹簧的抵持下抵在所述固定槽的底部,所述固定槽的左侧设有滑槽,所述滑槽的两端内滑动安装有两个对称设置的滑块,所述滑块均通过连接杆转动连接所述拉杆,所述可拆卸固定装置通过滑块分别卡接所述转座和所述机械臂。
[0008]
优选的,所述机械臂包括机械架和连接轴,所述机械架和所述连接轴一体成型,所述连接轴两侧设有与所述滑块相适配的卡槽,所述连接轴远离所述机械架的一端内设有与所述定位柱相适配的定位槽,所述机械架内设有传动槽,所述传动槽内转动安装有转杆,所述转杆上设有旋向相反的外螺纹,所述转杆的一端与微型马达的输出端固定连接,所述转杆上转动安装有两个对称设置的机械手,所述机械手随着所述转杆的转动沿相向或相背方向移动。
[0009]
优选的,所述驱动装置包括伺服电机和连杆,所述伺服电机位于所述喷涂方舱内
壁的底部,所述伺服电机通过传动组件连接所述连杆,所述连杆的两端均设有第二转轮,所述第二转轮均通过同步带与第一转轮连接。
[0010]
优选的,所述喷涂方舱内壁的左上角与右上角处均架设有烘干板。
[0011]
优选的,所述喷涂方舱的底部沿四周边角处均设有万向轮。
[0012]
(三)有益效果
[0013]
本实用新型的有益效果在于:采用上述技术方案,提拉拉杆,带动滑槽内的滑块相向运动,使滑块分别脱离转座和机械臂上的卡槽后,直接将机械臂抽离出,将更换后的机械臂对准定位柱插入固定筒体内后,松开拉杆,拉杆在第二弹簧的作用下抵持在固定槽的底部,使滑槽内的滑块相背运动,直至滑块分别卡接在转座和机械臂上的卡槽内,从而将机械臂固定在可拆卸固定装置内,只需通过提拉拉杆,便能完成对机械臂的拆装,极大的提高了安装的效率,间接地提高喷涂的效率,从而提供了一种拆卸方便的带机械臂的自动化方舱式喷涂系统。
附图说明
[0014]
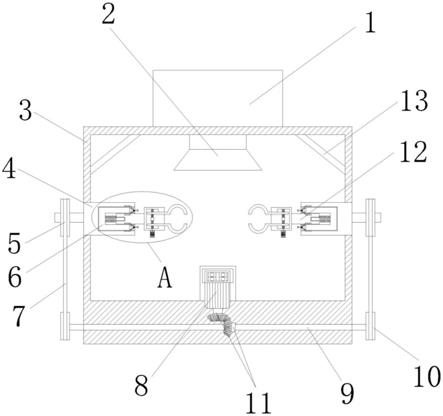
图1为一种带机械臂的自动化方舱式喷涂系统的结构示意图;
[0015]
图2为图1中a部的放大示意图;
[0016]
图3为可拆卸固定装置的结构示意图;
[0017]
图4为机械臂的结构示意图。
[0018]
【附图标记说明】
[0019]
1-涂料罐;2-喷嘴;3-喷涂方舱;4-转座;5-第一转轮;6-可拆卸固定装置;7-同步带;8-伺服电机;9-连杆;10-第二转轮;11-传动组件;12-机械臂;13-烘干板;601-第一弹簧;602-固定筒体;603-滑块;604
-ꢀ
第二弹簧;605-拉杆;606-连接杆;607-定位柱;121-定位槽;122-连接轴;123-机械架;124-机械手;125-转杆;126-微型马达;127-传动槽。
具体实施方式
[0020]
为了更好的解释本实用新型,以便于理解,下面结合附图,通过具体实施方式,对本实用新型作详细描述。
[0021]
请参照图1至图3,本实用新型提供的一种带机械臂的自动化方舱式喷涂系统,包括喷涂方舱3,喷涂方舱3,喷涂方舱3内壁顶部设有喷嘴 2,喷嘴2连接涂料罐1,且涂料罐1位于喷涂方舱3的顶部,喷涂方舱 3内壁两侧均转动安装有转座4,转座4相互远离的一端上均固定连接有转轴,转轴上均设有第一转轮5,第一转轮5连接驱动装置,转座4相互靠近的一端内均设有可拆卸固定装置6,可拆卸固定装置6内安装有机械臂12;可拆卸固定装置6包括呈中空状柱体的固定筒体602,固定筒体 602内的圆心处固定设有定位柱607,定位柱607上套设第一弹簧601,固定筒体602的开口处相对设置有固定槽,固定槽内滑动安装有拉杆605,拉杆605上套设第二弹簧604,拉杆605在第二弹簧604的抵持下抵在固定槽的底部,固定槽的左侧设有滑槽,滑槽的两端内滑动安装有两个对称设置的滑块603,滑块603均通过连接杆606转动连接拉杆605,可拆卸固定装置6通过滑块603分别卡接转座4和机械臂12;在更换喷涂方舱3内的机械臂12时,提拉拉杆605,带动滑槽内的滑块603相向运动,使滑块603分别脱离转座4和机械臂12上的卡槽后,直接将机械臂12 抽离出,将更换后的机械臂12对
准定位柱607插入固定筒体602内后,松开拉杆605,拉杆605在第二弹簧604的作用下抵持在固定槽的底部,使滑槽内的滑块603相背运动,直至滑块603分别卡接在转座4和机械臂12上的卡槽内,从而将机械臂12固定在可拆卸固定装置6内。
[0022]
本实用新型的工作原理如下:将待喷涂的零部件装夹在机械臂12上,通过驱动装置带动机械臂12旋转,配合喷嘴2进行均匀喷涂,当需要更换喷涂方舱3内的机械臂12时,提拉拉杆605,带动滑槽内的滑块603 相向运动,使滑块603分别脱离转座4和机械臂12上的卡槽后,直接将机械臂12抽离出,将更换后的机械臂12对准定位柱607插入固定筒体 602内后,松开拉杆605,拉杆605在第二弹簧604的作用下抵持在固定槽的底部,使滑槽内的滑块603相背运动,直至滑块603分别卡接在转座4和机械臂12上的卡槽内,从而将机械臂12固定在可拆卸固定装置6 内。
[0023]
参考图4,机械臂12包括机械架123和连接轴122,机械架123和连接轴122一体成型,连接轴122两侧设有与滑块603相适配的卡槽,连接轴122远离机械架123的一端内设有与定位柱607相适配的定位槽 121,机械架123内设有传动槽127,传动槽127内转动安装有转杆125,转杆125上设有旋向相反的外螺纹,转杆125的一端与微型马达126的输出端固定连接,转杆125上转动安装有两个对称设置的机械手124,机械手124随着转杆125的转动沿相向或相背方向移动,可以满足对不同尺寸的零部件的装夹。
[0024]
本实施例中,驱动装置包括伺服电机8和连杆9,伺服电机8位于喷涂方舱3内壁的底部,伺服电机8通过传动组件11连接连杆9,连杆9 的两端均设有第二转轮10,第二转轮10均通过同步带7与第一转轮5连接,通过伺服电机8同步带7动喷涂方舱3内壁两侧的转座4转动,便于配合喷嘴2进行喷涂,提高了喷涂效率。
[0025]
本实施例中,喷涂方舱3内壁的左上角与右上角处均架设有烘干板 13,通过烘干板13烘干喷涂后的零部件。
[0026]
本实施例中,喷涂方舱3的底部沿四周边角处均设有万向轮,万向轮就是所谓的活动脚轮,它的结构允许水平360度旋转。脚轮是个统称,包括活动脚轮和固定脚轮。固定脚轮没有旋转结构,不能水平转动只能垂直转动。这两种脚轮一般都是搭配用的,比如手推车的结构是前边两个固定轮,后边靠近推动扶手的是两个活动万向轮,便于通过万向轮移动喷涂方舱3。
[0027]
提拉拉杆605,带动滑槽内的滑块603相向运动,使滑块603分别脱离转座4和机械臂12上的卡槽后,直接将机械臂12抽离出,将更换后的机械臂12对准定位柱607插入固定筒体602内后,松开拉杆605,拉杆605在第二弹簧604的作用下抵持在固定槽的底部,使滑槽内的滑块 603相背运动,直至滑块603分别卡接在转座4和机械臂12上的卡槽内,从而将机械臂12固定在可拆卸固定装置6内,只需通过提拉拉杆605,便能完成对机械臂12的拆装,极大的提高了安装的效率,间接地提高喷涂的效率,从而提供了一种拆卸方便的带机械臂的自动化方舱式喷涂系统。
[0028]
以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1