点胶贴合的自动化设备的制作方法
1.本实用新型涉及机械自动化技术领域,特别涉及一种点胶贴合的自动化设备。
背景技术:
2.目前,手机上的拍照历史已有近20年了,期间更是经历了像素大战的战火洗礼。如今高像素、光学防抖、大光圈、双摄像头已经成为旗舰手机的标配。而随着用户对手机拍照能力期待更高,以及手机厂商们在光学拍照领域不断的创新,如今3d传感、多摄系统、潜望式高倍光学变焦已经成为了手机拍照未来创新的重点,手机拍照也向着专业相机不断靠近。
3.以潜望式高倍光学变焦为例,在潜望式高倍光学变焦中需要用到潜望式镜头,潜望式镜头包括三棱镜以及在所述三棱镜上贴附的遮光片。在现有技术中,生产潜望式镜头的流程如下:第一步:人工手动用镊子将遮光片从底膜上夹起。第二步:将夹起的遮光片贴合到弹片上。第三步:在三棱镜的指定贴面上手动点胶。第四步:将贴附有遮光片的弹片贴在三棱镜的点胶上。第五步:通过uv灯对点胶进行固化,从而使遮光片可靠的固定在三棱镜上。以上的生产过程,将导致以下问题:1、人工作业,导致生产效率低。2、人工成本高。3、工人作业的熟练程度不同,导致生产的潜望式镜头参差不齐,产品的一致性较差。
技术实现要素:
4.本实用新型的主要目的在于提供一种点胶贴合的自动化设备,旨在解决现有技术中因人工导致的生产效率低、成本高以及产品的一致性较差的技术问题。
5.为了解决上述技术问题,本实用新型提供的技术方案为:
6.一种点胶贴合的自动化设备,包括机架以及设置在所述机架上的载台机构、送料机构、取放机构、旋转机构、脱模机构,所述取放机构上设有胶筒;
7.所述载台机构,用于承载第一物料;
8.所述送料机构,用于将第二物料输送至预设位置;
9.所述脱模机构,用于将所述卷膜来料中的第三物料分离出来;
10.所述取放机构,用于将所述第一物料放到所述旋转机构上;
11.所述旋转机构,用于将所述第一物料旋转预设角度,以使所述第一物料的贴面朝向预设方向;
12.所述取放机构,还用于将所述第三物料贴附在所述第二物料的贴面上,以形成第一产物;
13.所述取放机构,还用于将所述胶筒内的uv胶点胶到所述第一物料的贴面上,并将所述第一产物放到所述uv胶上,以使所述第一产物通过所述uv胶贴附在所述第一物料的贴面上,以形成第二产物,其中,所述第二物料位于所述第一物料和所述第三物料之间。
14.其中,所述送料机构包括第一送料组件以及对接所述第一送料组件的第二送料组件,所述第一送料组件用于盛放所述第二物料,并将所述第二物料以预设方向输送至所述
第二送料组件上,所述第二送料组件用于接取所述第一送料组件输送的所述第二物料,并将所述第二物料输送至预设位置。
15.其中,所述第一送料组件包括顶盘以及设置在所述顶盘底部的底盘振动器,所述顶盘用于盛放所述第二物料,并在底盘振动器的作用下将所述第二物料以预设方向从所述顶盘出口输送至所述第二送料组件上;所述第二送料组件包括直线轨道以及设置在所述直线轨道底部的振动器,所述直线轨道用于接取所述顶盘出口输送的所述第二物料,并在所述振动器的作用下将接取的所述第二物料输送至预设位置。
16.其中,所述第二送料组件还包括第一传感器和第一吸附组件,所述第一吸附组件用于吸附位于所述预设位置上相邻的第二物料,以防止其发生移动;所述第一传感器用于感应所述预设位置上是否存在所述第二物料,若存在,则所述第一传感器控制所述第一吸附组件吸附位于所述预设位置上相邻的第二物料;若不存在,则所述第一传感器控制所述第一吸附组件不吸附位于所述预设位置上相邻的第二物料。
17.其中,所述旋转机构包括旋转头以及与所述旋转头连接的第五电机,所述旋转头用于承载所述第一物料;所述第五电机用于驱动所述旋转头转动,以使所述第一物料的贴面朝向预设方向。
18.其中,所述旋转头包括承载部以及设置在所述承载部上的限位部,所述承载部用于承载所述第一物料,所述限位部用于将所述第一物料限制在预设位置上,以防止所述第一物料发生移动。
19.其中,所述承载部上设有uv灯,所述uv灯用于照射所述第一物料上的uv胶,以使所述uv胶固化。
20.其中,所述承载部上开设有相互连通第一容置槽、第二容置槽以及第三容置槽,所述第一容置槽和所述第二容置槽位于所述限位部的两侧,所述第三容置槽相对所述限位部设置;所述uv灯的数量为两个,分别为第一uv灯和第二uv灯,所述第一uv灯设置在所述第一容置槽内,所述第二uv灯设置在所述第二容置槽内,所述第一物料位于所述第三容置槽内,以使所述第一uv灯和所述第二uv灯从两侧分别照射所述uv胶。
21.其中,所述承载部上开设有气道,所述气道用于连通外部抽吸装置,以吸附所述第一物料。
22.其中,所述限位部上开设有适配所述第一物料端部的凹槽,所述凹槽用于防止所述第一物料端部发生移动。
23.与现有技术相比,本实用新型具有以下有益效果:
24.本实用新型通过载台机构、送料机构、脱模机构、取放机构以及旋转机构之间的协调配合,从而实现自动化贴片。自动化贴片具有以下优点:1、显著提高了贴片的生产效率;2、降低了人工成本。3、提高了产品的一致性,保证了产品的质量。
附图说明
25.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
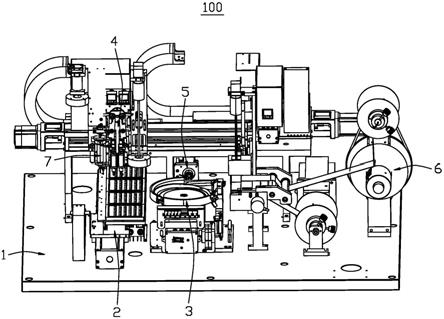
26.图1是根据本实用新型的一个实施例的点胶贴合的自动化设备的示意图;
27.图2是根据本实用新型的一个实施例的载台机构的示意图;
28.图3是根据本实用新型的一个实施例的送料机构的示意图;
29.图4是根据本实用新型的一个实施例的取放机构的示意图;
30.图5是根据本实用新型的一个实施例的第一取放子机构的示意图;
31.图6是根据本实用新型的一个实施例的第一z轴驱动组件的示意图;
32.图7是根据本实用新型的一个实施例的第二取放子机构的示意图;
33.图8是根据本实用新型的一个实施例的第二z轴驱动组件的示意图;
34.图9是根据本实用新型的一个实施例的旋转机构的示意图;
35.图10是根据本实用新型的一个实施例的脱模机构的立体图;
36.图11是根据本实用新型的一个实施例的脱模机构的侧视图。
37.100、点胶贴合的自动化设备;1、机架;2、载台机构;21、放料平台;22、驱动组件;3、送料机构;31、第一送料组件;311、顶盘;3111、顶盘出口;312、底盘振动器;32、第二送料组件;321、第一传感器;322、直线轨道;323、振动器;4、取放机构;41、第一取放子机构;411、第一驱动组件;4111、第一z轴驱动组件;41111、电机;41112、第一偏心轮;41113、第一偏心轴;41114、第二偏心轴;41115、第一连接杆;41116、第一滑块;41117、第一滑轨;41118、第二连接杆;41119、第二滑块;41120、第二滑轨;412、第一定位组件;413、吸附组件;414、第二吸附组件;4141、第一电机;4142、第一吸嘴;415、第三吸附组件;4151、第二电机;4152、第二吸嘴;42、第二取放子机构;421、第二驱动组件;4211、第二z轴驱动组件;42111、第三电机;42112、第二偏心轮;42113、第三偏心轴;42114、第三连接杆;42115、第三滑块;42116、第三滑轨;422、第二定位组件;423、第四吸附组件;4231、第四电机;4232、第三吸嘴;5、旋转机构;51、旋转头;52、第五电机;511、承载部;512、限位部;513、第一uv灯;514、第二uv灯;6、脱模机构;61、辊筒组件;611、第一辊筒结构;6111、第六电机;6112、第一滚轮;6113、第一辊筒;6114、第二滚轮;61141、第一圆盘;61142、第二圆盘;6115、第一传动带;6116、第一支撑件;61161、第一支撑件的第一端面;61162、第一支撑件的第二端面;6117、气缸;612、第二辊筒结构;6121、第二辊筒;6122、第二传动带;6123、第三滚轮;613、第三辊筒结构;6131、第二支撑件;6132、第三辊筒;6133、第七电机;62、导向组件;621、第一导向柱;622、第二导向柱;623、导向平台;624、第一限位滑块;625、第三限位滑块;63、接料平台;64、第二传感器;65、编码器;7、胶筒;8、第一物料;9、卷膜来料;91、第一膜层;92、第二膜层;10、料盒。
具体实施方式
38.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
39.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后......)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
40.另外,在本实用新型中涉及
″
第一
″
、
″
第二
″
等的描述仅用于描述目的,而不能理解
为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有
″
第一
″
、
″
第二
″
的特征可以明示或者隐含地包括至少一个该特征。另外,全文中的
″
和/或
″
包括三个方案,以a和/或b为例,包括a技术方案、b技术方案,以及a和b同时满足的技术方案;另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
41.如图1所示,本实用新型提供了一种点胶贴合的自动化设备100,包括机架1以及设置在机架1上的载台机构2、送料机构3、取放机构4、旋转机构5、脱模机构6,取放机构4上设有胶筒7;载台机构2用于承载第一物料8;送料机构3用于承载第二物料,并将第二物料输送至预设位置;脱模机构6用于承载卷膜来料9,并将卷膜来料9中的第三物料分离出来;取放机构4用于获取第一物料8,并将第一物料8放到旋转机构5上;旋转机构5用于将第一物料8旋转预设角度,以使第一物料8的贴面朝向预设方向;取放机构4,还用于获取分离后的第三物料,并将第三物料贴附在第二物料的贴面上,以形成第一产物取放机构4还用于将胶筒7内的uv胶点胶到第一物料8的贴面上,并将第一产物放到uv胶上,以使第一产物通过uv胶贴附在第一物料8的贴面上,以形成第二产物,其中,第二物料位于第一物料8和第三物料之间。在本实施例中,第一物料8为三棱镜,第二物料为遮光片,其中,遮光片的贴面具有粘性,第三物料为弹片。可以了解,在可选地实施例中,第一物料8并不局限于三棱镜,也可以为其他物料。第二物料并不局限于遮光片,也可以为其他物料。第三物料并不局限于弹片,也可以为其他物料。
42.本实用新型通过载台机构2、送料机构3、取放机构4、旋转机构5以及脱模机构6之间的协调配合,从而实现自动化贴片。自动化贴片具有以下优点:1、显著提高了贴片的生产效率;2、降低了人工成本。3、提高了产品的一致性,保证了产品的质量。
43.机架1包括支撑板以及罩设在支撑板上的机罩,载台机构2、送料机构3、取放机构4、旋转机构5、脱模机构6设置在支撑板上。通过机罩可使载台机构2、送料机构3、取放机构4、旋转机构5、脱模机构6处于完全封闭的空间下,使得取放机构4在来回操作的过程中不易产生灰尘,从而显著提高产品质量。
44.如图2所示,载台机构2包括放料平台21以及驱动放料平台21移动的驱动组件22,放料平台21用于承载料盒10,料盒10用于盛放第一物料8;驱动组件22用于驱动放料平台21移动至预设位置。
45.可以了解,驱动组件22可通过电机或者气缸实现驱动,此处不再赘述。
46.如图3所示,送料机构3包括第一送料组件31以及对接第一送料组件31的第二送料组件32,第一送料组件31用于盛放第二物料,并将第二物料以预设方向输送至第二送料组件32上,第二送料组件32用于接取第一送料组件31输送的第二物料,并将第二物料输送至预设位置。通过第一送料组件31将第二物料以预设方向输送至第二送料组件32上,并通过第二送料组件32将第二物料送至预设位置,使得第二取放子机构42能够快速将第三物料贴附到第二物料上,从而提高贴片的生产效率。
47.第一送料组件31包括顶盘311以及设置顶盘311底部的底盘振动器312,顶盘311用于盛放第二物料,并在底盘振动器312的作用下将第二物料以预设方向从顶盘311出口3111输送至第二送料组件32上;第二送料组件32包括直线轨道322以及设置在直线轨道322底部
的振动器323,直线轨道322用于接取顶盘311出口3111输送的第二物料,并在振动器323的作用下将接取的第二物料输送至预设位置。在本实施例中,第一送料组件31为振动盘,第二送料组件32为直振器。可以了解,在可选地实施例中,第一送料组件31也可以为提升机、机器人或者其他送料组件,第二送料组件32也可以为传送带或者其他直线送料组件。
48.第二送料组件32还包括第一传感器321和第一吸附组件(图未示出),第一吸附组件用于吸附位于预设位置上相邻的第二物料,以防止位于预设位置上相邻的第二物料发生移动;第一传感器321用于感应预设位置上是否存在第二物料,若存在,则第一传感器321控制第一吸附组件吸附位于预设位置上相邻的第二物料;若不存在,则第一传感器321控制第一吸附组件不吸附位于预设位置上相邻的第二物料。在本实施例中,第二物料在振动器323的作用下会源源不断向预设位置移动,当预设位置上的第二物料未在预设时间内被第四吸附组件423吸走时,后面的第二物料会堆叠在预设位置上,导致第二定位组件422无法精确定位到第二物料,导致第四吸附组件423无法吸附到第二物料,从而影响点胶贴合的自动化设备100的正常生产。在本实施例中,第一吸附组件设置在预设位置的相邻位置上,也就是预设位置后面一个第二物料的位置上。通过第一传感器321感应预设位置上是否存在第二物料,并控制第一吸附组件进行相应的启停操作,以保证在预设位置上始终只有一个第二物料,使得第二定位组件422能够精确地定位到第二物料,从而保证点胶贴合的自动化设备100的正常生产。
49.如图4所示,取放机构4包括第一取放子机构41和第二取放子机构42,第一取放子机构41用于获取第一物料8,并将第一物料8放到旋转机构5上;第二取放子机构42用于获取分离后的第三物料,并将第三物料贴附在第一物料8的贴面上,以形成第二产物。通过第一取放子机构41和第二取放子机构42同时作业,从而提高点胶贴合的自动化设备100的生产效率。
50.如图5所示,第一取放子机构41包括第一驱动组件411以及分别设置在第一驱动组件411上的第一定位组件412和吸附组件413;第一驱动组件411用于分别驱动吸附组件413和第一定位组件412移动,以使吸附组件413和第一定位组件412分别移动至预设位置;第一定位组件412用于定位载台机构2上的第一物料8,以使吸附组件413移动至被定位的第一物料8上;吸附组件413用于吸附被定位的第一物料8。通过第一定位组件412可精确定位第一物料8的位置,使得吸附组件413能够有效地吸附第一物料8,从而保证点胶贴合的自动化设备100的正常生产。通过吸附组件413可避免人工刮坏第一物料8,从而提高产品质量。
51.在本实施例中,第一定位组件412为ccd相机。
52.第一驱动组件411包括第一x轴驱动组件、第一y轴驱动组件以及第一z轴驱动组件4111,第一y轴驱动组件设置在第一x轴驱动组件上,第一z轴驱动组件4111设置在第一y轴驱动组件上,第一定位组件412设置在第一y轴驱动组件上,吸附组件413设置在第一z轴驱动组件4111上,第一x轴驱动组件用于分别驱动第一定位组件412和吸附组件413沿x轴方向移动,第一y轴驱组件用于分别驱动第一定位组件412和吸附组件413沿y轴方向移动,第一z轴驱动组件4111用于驱动吸附组件413沿z轴方向移动。通过第一驱动组件411可驱动吸附组件413沿x轴、y轴以及z轴方向任意移动,从而提高吸附组件413的作业范围。
53.可以了解,第一x轴驱动组件可通过电机或者气缸实现驱动。第一y轴驱动组件可通过电机或者气缸实现驱动。此处不再赘述。
54.如图6所示,第一z轴驱动组件4111包括电机41111、第一偏心轮41112、第一偏心轴41113、第二偏心轴41114、第一传动结构以及第二传动结构,吸附组件413的数量为两个,分别为第二吸附组件414和第三吸附组件415;第一偏心轮41112的两侧开设有第一偏心孔和第二偏心孔,第一偏心轴41113固定在第一偏心孔内,第二偏心轴41114固定在第二偏心孔内,电机41111和第一偏心轮41112连接,第一传动结构和第一偏心轴41113活动连接,第二传动结构和第二偏心轴41114活动连接第二吸附组件414设置在第一传动结构上,第三吸附组件415设置在第二传动结构上;当电机41111驱动第一偏心轮41112旋转时,第一偏心轮41112分别带动第一偏心轴41113和第二偏心轴41114旋转,第一偏心轴41113通过第一传动结构带动第二吸附组件414向第一方向移动,第二偏心轴41114通过第二传动结构带动第三吸附组件415向第二方向移动,以使第二吸附组件414和第三吸附组件415交替移动至预设位置,其中,第一方向和第二方向的方向相反。由于第一传动结构和第二传动结构设置在第一偏心轮41112的两侧,当第二吸附组件414向下靠近第一物料8时,第三吸附组件415将向上远离第一物料8;当第三吸附组件415向下靠近第一物料8时,第二吸附组件414将向上远离第一物料8,从而使第二吸附组件414和第三吸附组件415交替移动至第一物料8上。工作时,第一取放子机构41通过两个吸附组件可吸附两个第一物料8,第一取放子机构41先将第二吸附组件414上的第一物料8放到旋转组件上,待所需产物制作完成后,第一取放子机构41再通过第二吸附组件414吸附所需产物,并将第三吸附组件415上的第一物料8放到旋转组件上。通过在第一z轴驱动组件4111上设置两个吸附组件,从而提高点胶贴合的自动化设备100的工作效率。
55.第一传动结构包括第一连接杆41115、第一滑块41116以及第一滑轨41117;第一连接杆41115一端与第一偏心轴41113活动连接,另一端与第一滑块41116活动连接,第一滑块41116设置在第一滑轨41117上并可沿第一滑轨41117滑动,第二吸附组件414设置在第一滑块41116上;当电机41111驱动第一偏心轮41112旋转时,第一偏心轮41112带动第一偏心轴41113旋转,第一偏心轴41113带动第一连接杆41115移动,第一连接杆41115带动第一滑块41116沿第一滑轨41117滑动,以使第二吸附组件414移动至预设位置;第二传动结构包括第二连接杆41118、第二滑块41119以及第二滑轨41120;第二连接杆41118一端与第二偏心轴41114活动连接,另一端与第二滑块41119活动连接,第二滑块41119设置在第二滑轨41120上并可沿第二滑轨41120滑动,第三吸附组件415设置在第二滑块41119上;当电机41111驱动第一偏心轮41112旋转时,第一偏心轮41112带动第二偏心轴41114旋转,第二偏心轴41114带动第二连接杆41118移动,第二连接杆41118带动第二滑块41119沿第二滑轨41120滑动,以使第三吸附组件415移动至预设位置。
56.第二吸附组件414包括第一电机4141以及与第一电机4141连接的第一吸嘴4142,第一电机4141用于驱动第一吸嘴4142旋转,以使第一吸嘴4142上的第一物料8旋转至预设角度;第一吸嘴4142用于吸附第一物料8。通过第一电机4141调整第一物料8的放置角度,以使第一物料8精确地放置在旋转机构5上,使得后续操作得以顺利进行,从而保证点胶贴合的自动化设备100的正常生产。第三吸附组件415包括第二电机4151以及与第二电机4151连接的第二吸嘴4152,第二电机4151用于驱动第二吸嘴4152旋转,以使第二吸嘴4152上的第一物料8旋转至预设角度第二吸嘴4152用于吸附第一物料8。通过第二电机4151调整第一物料8的放置角度,以使第一物料8精确地放置在旋转机构5上,使得后续操作得以顺利进行,
从而保证点胶贴合的自动化设备100的正常生产。
57.如图7所示,第二取放子机构42包括第二驱动组件421以及分别设置在第二驱动组件421上的第二定位组件422和第四吸附组件423;第二驱动组件421用于分别驱动第四吸附组件423和第二定位组件422移动,以使第四吸附组件423和第二定位组件422分别移动至预设位置;第二定位组件422用于定位分离后的第三物料,以使第四吸附组件423移动至被定位的第三物料上;第四吸附组件423用于吸附被定位的第三物料。通过第二定位组件422可精确定位第三物料的位置,使得第四吸附组件423有效地吸附第三物料,从而保证点胶贴合的自动化设备100的正常生产。
58.在本实施例中,第二定位组件422为ccd相机。
59.第二驱动组件421包括第二x轴驱动组件、第二y轴驱动组件以及第二z轴驱动组件4211,第二y轴驱动组件设置在第二x轴驱动组件上,第二z轴驱动组件4211设置在第二y轴驱动组件上,第二定位组件422设置在第二y轴驱动组件上,第四吸附组件423设置在第二z轴驱动组件4211上,第二x轴驱动组件用于分别驱动第二定位组件422和第四吸附组件423沿x轴方向移动,第二y轴驱组件用于分别驱动第二定位组件422和第四吸附组件423沿y轴方向移动,第二z轴驱动组件4211用于驱动第四吸附组件423沿z轴方向移动。
60.可以了解,第二x轴驱动组件可通过电机或者气缸实现驱动。第二y轴驱动组件可通过电机或者气缸实现驱动。此处不再赘述。
61.如图8所示,第二z轴驱动组件4211包括第三电机42111、第二偏心轮42112、第三偏心轴42113以及第三传动结构;第二偏心轮42112在非圆心的位置上开设有第三偏心孔,第三偏心轴42113固定在第三偏心孔内,第三电机42111和第二偏心轮42112连接,第三传动结构和第三偏心轴42113活动连接;第四吸附组件423设置在第三传动结构上;当第三电机42111驱动第二偏心轮42112旋转时,第二偏心轮42112带动第三偏心轴42113旋转,第三偏心轴42113通过第三传动结构带动第四吸附组件423移动,以使第四吸附组件423移动至预设位置。
62.第三传动结构包括第三连接杆42114、第三滑块42115以及第三滑轨42116;第三连接杆42114一端与第三偏心轴42113活动连接,另一端与第三滑块42115活动连接,第三滑块42115设置在第三滑轨42116上并可沿第三滑轨42116滑动,第四吸附组件423设置在第三滑块42115上;当第三电机42111驱动第二偏心轮42112旋转时,第二偏心轮42112带动第三偏心轴42113旋转,第三偏心轴42113带动第三连接杆42114移动,第三连接杆42114带动第三滑块42115沿第三滑轨42116滑动,以使第四吸附组件423移动至预设位置。
63.第四吸附组件423包括第四电机4231以及与第四电机4231连接的第三吸嘴4232,第四电机4231用于驱动第三吸嘴4232旋转,以使第三吸嘴4232上的第三物料旋转至预设角度;第三吸嘴4232用于吸附第三物料。通过第四电机4231调整第三物料的放置角度,以使第三物料精确地放置在旋转机构5上,使得后续操作得以顺利进行,从而保证点胶贴合的自动化设备100的正常生产。
64.如图9所示,旋转机构5包括旋转头51以及与旋转头51连接的第五电机52,旋转头51用于承载第一物料8;第五电机52用于驱动旋转头51转动,以使第一物料8的贴面朝向预设方向。通过旋转机构5调节第一物料8的贴面方向,使得第一产物能够可靠地贴附在第一物料8上,从而保证产品质量。
65.旋转头51包括承载部511以及设置在承载部511上的限位部512,承载部511用于承载第一物料8,限位部512用于将第一物料8限制在预设位置上,以防止第一物料8在贴片的过程中发生移动,使得第一产物能够可靠地贴附在第一物料8上,从而保证产品质量。
66.承载部511上设有uv灯,uv灯用于照射第一物料8上的uv胶,以使uv胶固化,从而使第一物料8和第一产物能够可靠地连接在一起。
67.承载部511上开设有相互连通第一容置槽(图未示出)、第二容置槽(图未示出)以及第三容置槽(图未示出),第一容置槽和第二容置槽位于限位部512的两侧,第三容置槽相对限位部512设置;uv灯的数量为两个,分别为第一uv灯513和第二uv灯514,第一uv灯513设置在第一容置槽内,第二uv灯514设置在第二容置槽内,第一物料8位于第三容置槽内,以使第一uv灯513和第二uv灯514从两侧分别照射uv胶。通过第三容置槽以将第一物料8限制在预设位置上,以防止第一物料8在贴片的过程中发生移动,使得第一产物能够精确地贴附在第一物料8上,从而保证产品质量。通过第一uv灯513和第二uv灯514可加快uv胶的固化速度,从而提高生产效率。
68.承载部511上开设有气道(图未示出),气道用于连通外部抽吸装置,以吸附第一物料8。通过气道吸附第一物料8,以防止旋转头51在旋转的过程中第一物料8从旋转头51上掉落,使得第一物料8能够顺利旋转至预设方向,从而保证点胶贴合的自动化设备100的正常生产。
69.限位部512上开设有适配第一物料8端部的凹槽(图未示出),凹槽用于防止第一物料8端部在贴片的过程中发生移动,使得第一产物能够精确地贴附在第一物料8上。
70.如图10-11所示,脱模机构6包括辊筒组件61、导向组件62以及接料平台63;辊筒组件61用于承载卷膜来料9,并将卷膜来料9中的第三物料分离出来;导向组件62用于引导卷膜来料9的输送路径,并使分离后的第三物料脱落至接料平台63上;接料平台63用于承载脱落后的第三物料。通过滚筒组件即可将卷膜来料9的第三物料分离出来,从而使滚筒机构的结构简单,成本低。通过集成导向组件62和接料平台63,从而满足特殊用户的要求。
71.脱模机构6还包括第二传感器64,第二传感器64用于感应接料平台63上是否存在第三物料,若存在,则第二传感器64控制辊筒组件61停止作业;若不存在,则第二传感器64控制辊筒组件61继续作业。在本实施例中,第三物料以一排一排的形式设置在卷膜来料9上,并且每排均设有多个第三物料。当辊筒组件61滚动预设长度时,前面一排的多个第三物料会落在接料平台63上,如果第四吸附组件423未在预设时间内将接料平台63上的多个第三物料吸走,后面一排的多个第三物料就会覆盖前面一排的多个第三物料,导致第二定位组件422无法精确定位到第三物料,使得第四吸附组件423无法吸附到第三物料,从而影响点胶贴合的自动化设备100的正常生产。通过第二传感器64感应接料平台63上是否存在第三物料,并控制辊筒组件61进行相应的启停操作,以保证在前面一排的多个第三物料用完之前,后面一排的多个第三物料不会落在接料平台63上,使得第二定位组件422可精确定位到第三物料,从而保证点胶贴合的自动化设备100的正常生产。
72.第二传感器64为光纤第二传感器,当光纤第二传感器射出的光线被遮挡时,表示接料平台上存在第三物料;当光纤第二传感器射出的光线未被遮挡时,表示接料平台上不存在第三物料。
73.脱模机构6还包括编码器65,编码器65用于测量辊筒组件61滚动的长度;当辊筒组
件61滚动预设长度时,编码器65控制辊筒组件61停止作业;当辊筒组件61未滚动预设长度时,编码器65控制辊筒组件61继续作业。通过编码器65可精确测量辊筒组件61滚动的长度,以保证卷膜来料9上的每排第三物料均有规律的落在接料平台63上,从而保证点胶贴合的自动化设备100的正常生产。
74.辊筒组件61包括第一辊筒结构611、第二辊筒结构612以及第三辊筒结构613,第一辊筒结构611用于承载并输送卷膜来料9;第二辊筒结构612用于承载并回收卷膜来料9的第一膜层91;第三辊筒结构613用于承载并回收卷膜来料9的第二膜层92,其中,物料位于第一膜层91和第二膜层92之间。在本实施例中,第一膜层91为保护膜,第二膜层92为底膜。上述结构设计巧妙,在第一辊筒结构611输送卷膜来料9的同时,可通过第二辊筒结构612回收第一膜层91以及第三辊筒结构613回收第二膜层92,从而有效回收第一膜层91和第二膜层92。因此,通过上述辊筒组件61不仅环保,而且能够降低生产成本。
75.第一辊筒结构611包括第六电机6111、第一滚轮6112、第一辊筒6113、第二滚轮6114、第一传动带6115以及第一支撑件6116;第二辊筒结构612包括第二辊筒6121、第二传动带6122以及第三滚轮6123,第六电机6111和第一滚轮6112连接,第一辊筒6113和第二辊筒6121分别设置在第一支撑件6116的第一端面61161上,第二滚轮6114和第三滚轮6123分别设置在第一支撑件6116的第二端面61162上,第一辊筒6113和第二滚轮6114连接,第二辊筒6121和第三滚轮6123连接,第一滚轮6112和第二滚轮6114通过第一传动带6115传动连接,第二滚轮6114和第三滚轮6123通过第二传动带6122传动连接;当第六电机6111驱动第一滚轮6112转动时,第二滚轮6114分别带动第一辊筒6113和第三滚轮6123转动,第三滚轮6123带动第二辊筒6121转动,以使第一辊筒6113输送卷膜来料9的同时,使第二辊筒6121回收分离后的第一膜层91,其中,第一辊筒6113和第二辊筒6121滚动的长度相同。上述结构设计巧妙,通过第二滚轮6114分别传动连接第一滚轮6112和第三滚轮6123,使得一个电机即可同时带动第一辊筒6113和第二辊筒6121作业,不仅降低了点胶贴合的自动化设备100的功耗,而且降低了点胶贴合的自动化设备100的成本。
76.第三辊筒结构613包括第二支撑件6131、第三辊筒6132以及第七电机6133,第三辊筒6132设置在第二支撑件6131上,第三辊筒6132和第七电机6133连接;当第七电机6133驱动第三辊筒6132转动时,第三辊筒6132回收分离后的第二膜层92,其中,第六电机6111和第七电机6133同步作业,第一辊筒6113在竖直方向上位于第二辊筒6121和第三辊筒6132之间。
77.第二滚轮6114包括第一圆盘61141以及与第一圆盘61141连接的第二圆盘61142,第一圆盘61141和第二圆盘61142同心设置;第一圆盘61141和第一滚轮6112通过第一传动带6115连接,第二圆盘61142和第三滚轮6123通过第二传动带6122连接。通过第一圆盘61141和第二圆盘61142,可同时驱动第一辊筒6113和第二辊筒6121作业。在本实施例中,第一圆盘61141和第二圆盘61142为一体成型结构。在可选地实施例中,第一圆盘61141和第二圆盘61142也可以为分体结构。
78.第一滚轮6112的侧壁上开设有一圈第一凹槽,第一圆盘61141的侧壁上开设有一圈第二凹槽,第一传动带6115分别套设在第一凹槽和第二凹槽内;第二圆盘61142上开设有第三凹槽,第三滚轮6123上开设有第四凹槽,第二传动带6122分别套设在第三凹槽和第四凹槽内。通过第一凹槽和第二凹槽,可防止第一传动带6115从第一滚轮6112和第二滚轮
6114上脱出,从而提高第一滚轮6112和第二滚轮6114之间传动的可靠性。通过第二凹槽和第三凹槽,可防止第二传动带6122从第二滚轮6114和第三滚轮6123上脱出,从而提高第二滚轮6114和第三滚轮6123之间传动的可靠性。
79.第一辊筒结构611还包括气缸6117,第一滚筒上开设有第五凹槽,气缸6117设置在第五凹槽内。气缸6117用于抵顶卷膜来料9的内壁,以防止卷料来料在输送的过程中打滑,从而保证卷料来料输送的可靠性。
80.导向组件62包括第一导向柱621、第二导向柱622以及导向平台623,接料平台63和导向平台623对接,卷膜来料9依次经过第一导向柱621的底部、第二导向柱622的顶部以及导向平台623的顶部并绕过导向平台623的底部,以使分离后的第三物料脱落至接料平台63上。通过第一导向柱621和第二导向柱622可拉紧卷料来料,以防止卷料来料在输送的过程中打滑,从而保证卷料来料输送的可靠性。
81.导向组件62还包括第一限位滑块624和第二限位滑块,第一限位滑块624和第二限位滑块分别套设在第一导向柱621上并可沿第一导向柱621滑动,第一限位滑块624和第二限位滑块位于卷膜来料9的两侧,第一限位滑块624和第二限位滑块用于将卷膜来料9限制在预设位置上。通过调节第一限位滑块624和第二限位滑块之间的相对距离,可将卷膜来料9限制在预设位置上,以防止卷膜来料9在第一导向柱621上发送移动,从而保证第三物料有效的脱落至接料平台63上。通过调节第一限位滑块624和第二限位滑块之间的相对距离,可适应不同宽度的卷膜来料9,从而提高点胶贴合的自动化设备100的适用性。
82.导向组件62还包括第三限位滑块625和第四限位滑块,第三限位滑块625和第四限位滑块分别套设在第二导向柱622上并可沿第二导向柱622滑动,第三限位滑块625和第四限位滑块位于卷膜来料9的两侧,第三限位滑块625和第四限位滑块用于将卷膜来料9限制在预设位置上。第三限位滑块625和第四限位滑的效果同上,此处不再赘述。
83.工作过程:
84.人工将盛放有第一物料8的料盒10放到放料平台21上,人工将第二物料放到第一送料组件31上,人工将卷膜来料9放到辊筒组件61上。启动点胶贴合的自动化设备100,放料平台21移动至预设位置,第一定位组件412定位放料平台21上的两个第一物料8,第二吸附组件414吸附其中一个第一物料8,第三吸附组件415吸附另外一个第一物料8。第二吸附组件414将其中一个第一物料8放到旋转头51上,旋转头51将第一物料8的贴面旋转至预设方向。胶筒7将uv胶点胶到第一物料8的贴面上。第一送料组件31将第二物料以预设方向输送至第二送料组件32上,第二送料组件32用于接取第一送料组件31输送的第二物料,并将第二物料输送至预设位置。辊筒组件61分离卷膜来料9并将分离后的第三物料通过导向组件62脱落至接料平台63上。第二定位组件422定位接料平台63上的第三物料,第四吸附组件423吸附第三物料,并将第三物料贴附在第二物料的贴面上,以形成第一产物。第四吸附组件423再将第一产物放到uv胶上,以使第一产物通过uv胶贴附在第一物料8的贴面上,以形成第二产物。第二吸附组件414吸附第二产物,第三吸附组件415将另外一个第一物料8放到旋转组件上,第二吸附组件414将第二产物放到料盒10中。
85.以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是在本实用新型的实用新型构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1