一种自动涂装喷房的移栽系统的制作方法
[0001]
本实用新型涉及喷涂设备领域,尤其涉及到一种自动涂装喷房的移栽系统。
背景技术:
[0002]
智能涂装指的是一种由智能机器和人共同组成的人机一体化智能系统,它在涂装过程中能进行智能活动,诸如分析、推理、判断、构思和决策等。通过人与智能机器的合作共事,去扩大、延伸和部分地取代人在涂装过程中的脑力劳动和体力劳动。它把智能自动化的概念更新,扩展到柔性化、智能化和高度集成化上。
[0003]
我国涂装生产线的发展经历了由手工到生产线、到自动生产线的发展过程。为了顺应工业智能化技术发展趋势,推广智能表面涂装。解决长久以来人工操作表面涂装领域普遍存在的下列问题:
[0004]
1、操作人员对涂装知识欠缺;
[0005]
2、操作人员的喷涂效率低;
[0006]
3、操作人员涂装时产品的涂层质量不稳定,合格率低;
[0007]
4、产品种类变化多,治具通用性不高;
[0008]
5、工序段多,操作人员的使用效率低。
[0009]
因此,我们有必要对这样一种结构进行改善,以克服上述缺陷。
技术实现要素:
[0010]
本实用新型的目的是提供一种自动涂装喷房的移栽系统,通过两条喷涂输送链交替输送工件,并通过喷涂机器人喷涂,提高喷涂效率,节约时间;并且通过上述结构布置,有效实现喷房整体小型化。
[0011]
本实用新型的上述技术目的是通过以下技术方案实现的:一种自动涂装喷房的移栽系统,包括喷房,所述喷房内设置有用于自动进行喷涂的喷涂机器人,所述喷房内设置有用于抓取待喷涂工件的第一机器人、用于输送第一机器人所抓取物件至喷漆机器人位置的喷涂输送链、用于供喷涂机器人喷涂完成的工件暂存的第一缓存架、用于抓取喷漆完成物件的第二机器人、用于干化所述第二机器人所抓取物件的静置输送链,所述第一缓存架位于所述喷涂输送链与静置输送链之间,所述第一机器人抓取工件并将工件装置于喷涂输送链,并由喷涂输送链输送至喷涂机器人位置进行喷涂,完成后喷涂输送链输送出,通过第一机器人抓取喷涂完成的工件装置于第一缓存架,后通过第二机器人将位于第一缓存架的工件装置于静置输送链。
[0012]
本实用新型的进一步设置为:所述喷涂输送链设置为两条,且两条所述喷涂输送链呈水平平行设置。
[0013]
本实用新型的进一步设置为:所述静置输送链呈环状设置,且所述静置输送链设置为两条,两条静置输送链呈上下排列。
[0014]
本实用新型的进一步设置为:所述第一缓存架与静置输送链之间设置有第二缓存
架,所述第二缓存架结构与第一缓存架结构一致,所述第二缓存架供第二机器人抓取的工件装载,所述第一缓存架可抓取装载于第二缓存架的工件。
[0015]
本实用新型的进一步设置为:所述喷房设置有两组上件旋转台,两组上件旋转台呈并排设置,所述上件旋转台设置有至少两个供工件装载的工位,所述第一机器人可抓取或装载上件旋转台对应工位的工件。
[0016]
本实用新型的进一步设置为:一种自动涂装喷房的移栽系统的喷涂加工方法,具有如下步骤,
[0017]
步骤1:工人将工件装载于一组上件旋转台的工位,上件旋转台驱动工件旋转并使工件位于喷房内,工件朝向第一机器人;
[0018]
步骤2:第一机器人抓取上件旋转台的工件并将工件装载于其中一条喷涂输送链,并通过喷涂输送链输送至喷涂机器人的喷涂位置;
[0019]
步骤3:通过喷涂机器人对工件进行喷涂作业;
[0020]
步骤4:在喷涂机器人对工件进行喷涂作业时,第一机器人抓取上件旋转台的工件并装载于另一条喷涂输送链,并当前一个工件喷涂完成后,另一条喷涂输送链将工件输送至喷涂机器人位置,两条喷涂输送链交替输送工件;
[0021]
步骤5:第一机器人将工件装载于其中一条喷涂输送链后,抓取另一条喷涂输送链上已喷涂完成的工件,并将工件装载于第一缓存架;
[0022]
步骤6:第二机器人抓取装载于第一缓存架的工件,并将工件装载于其中一条静置输送链,并抓取装载于另一条静置输送链的工件;
[0023]
步骤7:静置输送链转动一定角度并供下一个工件进行装载,并且装载于静置输送链的工件装载一定时间,待工件表面的油漆固化;
[0024]
步骤8:第二机器人抓取静置输送链的工件后,将工件装载于第二缓存架;
[0025]
步骤9:第一机器人将工件装载于第一缓存架后,抓取第二缓存架的工件,并将工件装载于另一组上件旋转台;
[0026]
步骤10:上件旋转台旋转后,使工件位于喷房外侧,供工人取出喷涂完成的工件。
[0027]
综上所述,本实用新型具有以下有益效果:
[0028]
对工件进行喷涂工序时,通过第一机器人抓取工件并将工件装载于喷涂输送链,然后通过喷涂输送链将工件输送至喷涂机器人位置,进行喷涂,喷涂完成后,喷涂输送链将工件往回运输,然后通过第一机器人抓取喷涂完成的工件,并将工件装载于第一缓存架,第二机器人抓取第一缓存架的工件,并将工件装载于静置输送链,并存留于静置输送链,直至实现工件表面漆料固化。
[0029]
对工件喷涂时,工人将工件装载于其中一个上件旋转台,然后通过上件旋转台将工件转入至喷房内,第一机器人抓取该上件旋转台上的工件,并将工件装置于喷涂输送链,并通过喷涂输送链将工件输送至喷涂机器人位置进行喷涂,然后第一机器人抓取另一条输送链上已喷涂完成的工件,并将工件装置于第一缓存架,之后第一机器人抓取第二缓存架涂料已固化的工件,并将工件装置于另一个上件旋转台,并通过上件旋转台转出喷房,完成喷涂移栽;第二机器人抓取第一缓存架的工件,并将工件装置于一条静置输送链,然后抓取另一条静置输送链轮相应涂料已固化的工件,并将工件装置于第二缓存架,供第一机器人抓取,两条静置输送链同步转动一定角度,并供下一个工件装置,工件通过装置于静置输送
链,一定时间待涂料固化后方便取下。
[0030]
另外通过两条喷涂输送链交替输送工件,并通过喷涂机器人喷涂,提高喷涂效率,节约时间;并且通过上述结构布置,有效实现喷房整体小型化,集成化。
附图说明
[0031]
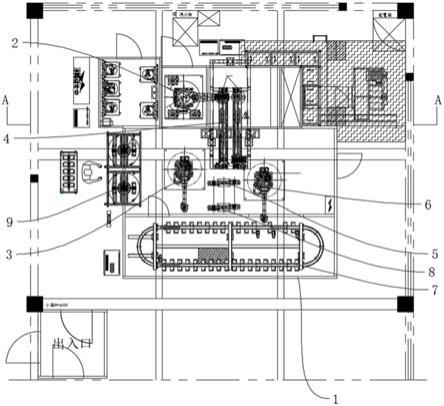
图1是本实用新型的俯视图;
[0032]
图2是本实用新型的侧视图;
[0033]
图3是图1中a-a的剖视图;
[0034]
图4是喷涂输送链与喷涂机器人的位置示意图。
[0035]
图中数字所表示的相应部件名称:1、喷房;2、喷涂机器人;3、第一机器人;4、喷涂输送链;5、第一缓存架;6、第二机器人;7、静置输送链;8、第二缓存架;9、上件旋转台。
具体实施方式
[0036]
为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合图示与具体实施例,进一步阐述本实用新型。
[0037]
如图1至图4所示,本实用新型提出的一种自动涂装喷房的移栽系统,包括喷房1,所述喷房1内设置有用于自动进行喷涂的喷涂机器人2,所述喷房1内设置有用于抓取待喷涂工件的第一机器人3、用于输送第一机器人3所抓取物件至喷漆机器人位置的喷涂输送链4、用于供喷涂机器人2喷涂完成的工件暂存的第一缓存架5、用于抓取喷漆完成物件的第二机器人6、用于干化所述第二机器人6所抓取物件的静置输送链7,所述第一缓存架5位于所述喷涂输送链4与静置输送链7之间。
[0038]
对工件进行喷涂工序时,通过第一机器人3抓取工件并将工件装载于喷涂输送链4,然后通过喷涂输送链4将工件输送至喷涂机器人2位置,进行喷涂,喷涂完成后,喷涂输送链4将工件往回运输,然后通过第一机器人3抓取喷涂完成的工件,并将工件装载于第一缓存架5,第二机器人6抓取第一缓存架5的工件,并将工件装载于静置输送链7,并存留于静置输送链7,直至实现工件表面漆料固化。
[0039]
其中喷涂输送链4设置为两条,两条喷涂输送链4呈并排设置,且喷涂输送链4可往复移动,喷涂机器人2位于喷涂输送链4一端端部位置,并用于对喷涂输送链4的工件进行喷涂作业,第一机器人3位于喷涂输送链4远离喷涂机器人2一端位置。
[0040]
静置输送链7呈环状设置,且所述静置输送链7设置为两条,两条静置输送链7呈上下排列,并且每条静置输送链7均设置有若干个供工件装载的工位。在第一缓存架5与静置输送链7之间设置有第二缓存架8,所述第二缓存架8结构与第一缓存架5结构一致,所述第二缓存架8供第二机器人6抓取的工件装载,所述第一缓存架5可抓取装载于第二缓存架8的工件。另外喷房1还装置由两组上件旋转台9,两组上件旋转台9呈并排设置,并且每组上件旋转台9均设置有两个供工件装载且呈相对设置的工位,且其中一个工位位于喷房1外侧供工人进行装载工件,上件旋转台9可进行旋转,使工件转入至喷房1内。
[0041]
对工件喷涂时,工人将工件装载于其中一个上件旋转台9,然后通过上件旋转台9将工件转入至喷房1内,第一机器人3抓取该上件旋转台9上的工件,并将工件装置于喷涂输送链4,并通过喷涂输送链4将工件输送至喷涂机器人2位置进行喷涂,然后第一机器人3抓
取另一条输送链上已喷涂完成的工件,并将工件装置于第一缓存架5,之后第一机器人3抓取第二缓存架8涂料已固化的工件,并将工件装置于另一个上件旋转台9,并通过上件旋转台9转出喷房1,完成喷涂移栽;第二机器人6抓取第一缓存架5的工件,并将工件装置于一条静置输送链7,然后抓取另一条静置输送链7轮相应涂料已固化的工件,并将工件装置于第二缓存架8,供第一机器人3抓取,两条静置输送链7同步转动一定角度,并供下一个工件装置,另外工件通过装置于静置输送链7,一定时间待涂料固化后方便取下;另外通过两条喷涂输送链4交替输送工件,并通过喷涂机器人2喷涂,提高喷涂效率,节约时间;并且通过上述结构布置,有效实现喷房整体小型化,集成化。
[0042]
本实施例中,工件可通过相应工装挂载于相应的上件旋转台9、喷涂输送链4、第一缓存架5、第二缓存加、静置输送链7,方便第一机器人3或第二机器人6取放。
[0043]
实施例2:一种实施例1所述的自动涂装喷房的移栽系统的喷涂加工方法,具有如下步骤:
[0044]
步骤1:步骤1:工人将工件装载于一组上件旋转台9的工位,上件旋转台9驱动工件旋转并使工件位于喷房1内,工件朝向第一机器人3;
[0045]
步骤2:第一机器人3抓取上件旋转台9的工件并将工件装载于其中一条喷涂输送链4,并通过喷涂输送链4输送至喷涂机器人2的喷涂位置;
[0046]
步骤3:通过喷涂机器人2对工件进行喷涂作业;
[0047]
步骤4:在喷涂机器人2对工件进行喷涂作业时,第一机器人3抓取上件旋转台9的工件并装载于另一条喷涂输送链4,并当前一个工件喷涂完成后,另一条喷涂输送链4将工件输送至喷涂机器人2位置,两条喷涂输送链4交替输送工件;
[0048]
步骤5:第一机器人3将工件装载于其中一条喷涂输送链4后,抓取另一条喷涂输送链4上已喷涂完成的工件,并将工件装载于第一缓存架5;
[0049]
步骤6:第二机器人6抓取装载于第一缓存架5的工件,并将工件装载于其中一条静置输送链7,并抓取装载于另一条进组输送链的工件;
[0050]
步骤7:静置输送链7转动一定角度并供下一个工件进行装载,并且装载于静置输送链7的工件装载一定时间,待工件表面的油漆固化;
[0051]
步骤8:第二机器人6抓取静置输送链7的工件后,将工件装载于第二缓存架8;
[0052]
步骤9:第一机器人3将工件装载于第一缓存架5后,抓取第二缓存架8的工件,并将工件装载于另一组上件旋转台9;
[0053]
步骤10:上件旋转台9旋转后,使工件位于喷房1外侧,供工人取出喷涂完成的工件。
[0054]
通过第一机器人3及第二机器人6依次循环工作,有效提高工件移转效率,节约时间。
[0055]
在本文中,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”、“竖直”、“水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了表达技术方案的清楚及描述方便,因此不能理解为对本实用新型的限制。
[0056]
在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,除了包含所列的那些要素,而且还可包含没有明确列出的其他要素。
[0057]
以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行
业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1