一种管道内喷涂机器人的制作方法
1.本实用新型属于管道喷涂技术领域,具体涉及到一种管道内喷涂机器人。
背景技术:
2.市政供热、供水和消防等管道接口内防腐一向是工程中常面临的惯例。在管道防腐工作中大管径管道焊缝采用人工入孔涂覆防腐,而小管径及特征管道人工涂覆不易实现。但供热、供水和消防管道中,小管径管道占据总体管道长度的大部分,管道支线多,焊缝数量大,急需一种能够实现小管径及特征管道内壁防腐喷涂的装置。
技术实现要素:
3.针对现有技术的上述不足,本实用新型提供一种管道内喷涂机器人,其有效解决了小管径及特征管道内壁不易喷涂的问题。
4.为实现上述目的,本实用新型解决其技术问题所采用的技术方案是:提供一种管道内喷涂机器人,包括内部操作车和外控设备;内部操作车包括动力组件、控制组件、除锈组件和喷涂组件;动力组件、控制组件、除锈组件和喷涂组件依次固定连接;
5.除锈组件包括车体三、驱动轴一、驱动轴二、刷子一、刷子二、吸尘器和容杂袋,驱动轴一、驱动轴二和吸尘器设置于车体三内部,刷子一、刷子二和容杂袋设置于车体三外部,驱动轴一、驱动轴二和吸尘器和控制组件电性连接,驱动轴一和刷子一连接,驱动轴二和刷子二连接、吸尘器和容杂袋连接,驱动轴一顺时针旋转,驱动轴二逆时针旋转。
6.根据上述技术方案,本实用新型具有以下优点:
7.驱动轴一、驱动轴二和吸尘器设置于车体三内部,刷子一、刷子二和容杂袋设置于车体三外部,驱动轴一、驱动轴二和吸尘器和控制组件电性连接,驱动轴一和刷子一连接,驱动轴二和刷子二连接、吸尘器和容杂袋连接,驱动轴一顺时针旋转,驱动轴二逆时针旋转,除锈组件运行时,驱动轴一、驱动轴二和吸尘器运行,驱动轴一带动刷子一顺时针旋转,驱动轴二带动刷子二逆时针旋转,除去管道内壁的锈迹,吸尘器将掉落的锈迹吸入容杂袋中,防止锈迹造成的管道堵塞,提升了管道内喷涂机器人的施工质量。
8.优选地,控制组件包括车体二、摄像头、探照灯、涂层测厚仪、内置天线和控制器,摄像头、探照灯和涂层测厚仪设置于车体二外部,内置天线和控制器设置于车体二内部,摄像头、探照灯、涂层测厚仪和内置天线与控制器电性连接。
9.根据优选上述技术方案,本实用新型具有以下优点:
10.摄像头、探照灯、涂层测厚仪和内置天线与控制器电性连接,涂层测厚仪检测涂层厚度后,将信号发送至控制器,控制器通过对涂层厚度的判断控制动力组件、除锈组件和喷涂组件的运行,并通过内置天线将信号发送至外控设备,外控设备收到信号后可以遥控打开摄像头和探照灯,进一步观察管道内部情况,再控制内部操作车的运行,实现了小口径管道除锈喷涂的精准定位。
11.优选地,控制组件设置有旋转轴,旋转轴一端与动力组件连接,另一端与除锈组件
连接,旋转轴与控制器电性连接,车体二设置在旋转轴上。
12.根据优选上述技术方案,本实用新型具有以下优点:
13.控制组件设置有旋转轴,旋转轴一端与动力组件连接,另一端与除锈组件连接,旋转轴与控制器电性连接,车体二设置在旋转轴上,可通过控制器驱动旋转轴旋转,带动车体二旋转,使摄像头、探照灯、涂层测厚仪可以360
°
的检测和观察管道内壁。
14.优选地,喷涂组件包括车体四、喷涂泵、料仓、旋杯和传动轮二,喷涂泵和料仓设置于车体四内部,旋杯和传动轮二设置于车体四外部,喷涂泵、料仓和旋杯依次连接,传动轮二通过轮轴设置于车体四底部,喷涂泵和旋杯与控制组件电性连接。
15.根据优选上述技术方案,本实用新型具有以下优点:
16.喷涂泵和料仓设置于车体四内部,旋杯和传动轮二设置于车体四外部,喷涂泵、料仓和旋杯依次连接,传动轮二通过轮轴设置于车体四底部,喷涂泵和旋杯与控制组件电性连接,传动轮二用于支撑车体四和传动,保证内部操作车的前进和停止,喷涂泵用于对料仓内的涂料给予压力,将涂料雾化后,使涂料通过转动的旋杯,均匀的喷涂在管道内壁上。
17.优选地,动力组件包括车体一、电池、驱动装置、制动装置、驱动轮和传动轮一,电池、驱动装置和制动装置均设置于车体一内部,电池、驱动装置和制动装置与控制组件电性连接,驱动轮和传动轮一设置于车体外部,驱动轮通过轮轴和驱动装置连接,传动轮一通过轮轴和制动装置连接。
18.根据优选上述技术方案,本实用新型具有以下优点:
19.电池、驱动装置和制动装置与控制组件电性连接,驱动轮和传动轮一设置于车体外部,驱动轮通过轮轴和驱动装置连接,传动轮一通过轮轴和制动装置连接,控制组件通过信号控制驱动装置和制动装置,进一步控制内部操作车的前进与停止;
20.优选地,外控设备包括天线、遥控器、蓄电池、影像显示屏和信号接收输出集成盒,天线、蓄电池、影像显示屏和信号接收输出集成盒之间电性连接。
21.根据优选上述技术方案,本实用新型具有以下优点:
22.外控设备包括天线、遥控器、蓄电池、影像显示屏和信号接收输出集成盒,天线、蓄电池、影像显示屏和信号接收输出集成盒之间电性连接,通过遥控器打开摄像头和探照灯后,通过内置天线、天线和影像显示屏将摄像头拍摄的画面展示在影像显示屏上,便于操作者观察管道内部环境,观察施工质量,进一步通过遥控器操作内部操作车运行。
23.优选地,刷子一与驱动轴一通过螺栓实现可拆卸连接,刷子二与驱动轴二通过螺栓实现可拆卸连接。
24.根据优选上述技术方案,本实用新型具有以下优点:
25.刷子一与驱动轴一通过螺栓实现可拆卸连接,刷子二与驱动轴二通过螺栓实现可拆卸连接,可对刷子一和刷子二进行及时更换,延长管道内喷涂机器人的使用寿命。
26.优选地,刷子一和刷子二长度为5cm
‑
20cm。
27.根据优选上述技术方案,本实用新型具有以下优点:
28.刷子一和刷子二长度为5cm
‑
20cm,可根据管道半径选择不同长度的刷子一和刷子二,扩大管道内喷涂机器人的使用范围。
29.优选地,控制器型号为台达plc
‑
ah500。
30.根据优选上述技术方案,本实用新型具有以下优点:
31.控制器型号为台达plc
‑
ah500,台达plc
‑
ah500可满足管道内喷涂机器人进行可编程逻辑控制的需求。
32.优选地,所述轮轴均可以更换。
33.根据优选上述技术方案,本实用新型具有以下优点:
34.所述轮轴均可以更换,可在轮轴损伤时更换轮轴,增加管道内喷涂机器人的使用寿命;可根据管道半径选择适合长度的轮轴,增加管道内喷涂机器人的使用范围。
附图说明
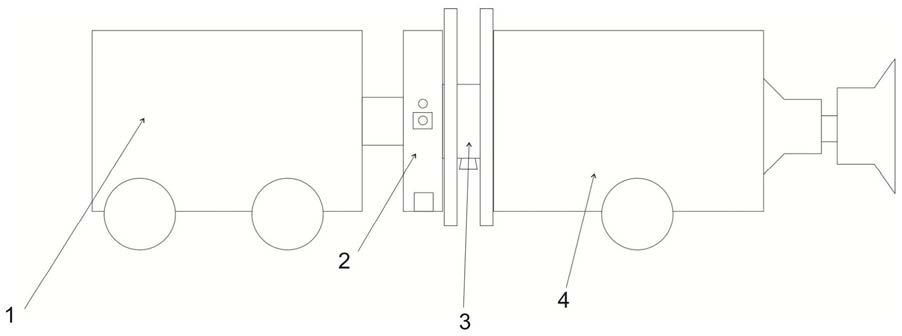
35.图1为内部操作车的正面示意图;
36.图2为动力组件的正面剖视图;
37.图3为控制组件的正面剖视图;
38.图4为除锈组件的正面剖视图;
39.图5为喷涂组件的正面剖视图;
40.图6为外控设备的示意图;
41.图7为动力组件的侧面示意图。
42.其中,1、动力组件;11、车体一;12、电池;13、驱动装置;14、制动装置;15、驱动轮;16、传动轮一;2、控制组件;21、车体二;22、摄像头;23、探照灯;24、涂层测厚仪;25、内置天线;26、控制器;27、旋转轴;3、除锈组件;31、车体三;32、驱动轴一;33、驱动轴二;34、吸尘器;35、容杂袋;36、刷子一;37、刷子二;4、喷涂组件;41、车体四;42、喷涂泵;43、料仓;44、旋杯;45、传动轮二;5、外控设备;51、天线;52、蓄电池;53、影像显示屏;54、信号接收输出集成盒。
具体实施方式
43.下面结合附图对本实用新型的具体实施方式做详细的说明。
44.本实用新型的一个实施例中,如图1所示,提供了一种管道内喷涂机器人,包括内部操作车和外控设备5;内部操作车包括动力组件1、控制组件2、除锈组件3和喷涂组件4;动力组件1、控制组件2、除锈组件3和喷涂组件4依次固定连接;
45.如图2所示,动力组件1包括车体一11、电池12、驱动装置13、制动装置14、驱动轮15和传动轮一16,电池12、驱动装置13和制动装置14均设置于车体一11内部,电池12、驱动装置13和制动装置14与控制组件2电性连接,驱动轮15和传动轮一16设置于车体外部,驱动轮15通过轮轴和驱动装置13连接,传动轮一16通过轮轴和制动装置14连接;
46.如图3所示,控制组件2包括车体二21、摄像头22、探照灯23、涂层测厚仪24、内置天线25、控制器26,其中,控制器26型号为台达plc
‑
ah500,摄像头22、探照灯23和涂层测厚仪24设置于车体二21外部,内置天线25和控制器26设置于车体二21内部,摄像头22、探照灯23、涂层测厚仪24和内置天线25与控制器26电性连接;控制组件2设置有旋转轴27,旋转轴27一端与动力组件1连接,另一端与除锈组件3连接,旋转轴27与控制器26电性连接,车体二21设置在旋转轴27上;
47.如图4所示,除锈组件3包括车体三31、驱动轴一32、驱动轴二33、刷子一36、刷子二37、吸尘器34和容杂袋35,驱动轴一32、驱动轴二33和吸尘器34设置于车体三31内部,刷子
一36、刷子二37和容杂袋35设置于车体三31外部,驱动轴一32、驱动轴二33和吸尘器34和控制组件2电性连接,驱动轴一32和刷子一36连接,驱动轴二33和刷子二37连接、吸尘器34和容杂袋35连接,驱动轴一32顺时针旋转,驱动轴二33逆时针旋转,刷子一36与驱动轴一32通过螺栓实现可拆卸连接,刷子二37与驱动轴二33通过螺栓实现可拆卸连接,刷子一36和刷子二37长度为5cm
‑
20cm;
48.如图5所示,喷涂组件4包括车体四41、喷涂泵42、料仓43、旋杯44和传动轮二45,喷涂泵42和料仓43设置于车体四41内部,旋杯44和传动轮二45设置于车体四41外部,喷涂泵42、料仓43和旋杯44依次连接,传动轮二45通过轮轴设置于车体四41底部,喷涂泵42和旋杯44与控制组件2电性连接;
49.如图6所示,外控设备5包括天线51、遥控器、蓄电池52、影像显示屏53和信号接收输出集成盒54,天线51、蓄电池52、影像显示屏53和信号接收输出集成盒54之间电性连接。
50.本实用新型使用前,在控制器26内预设涂层厚度预设值,根据管道半径安装5cm
‑
20cm之间合适长度的刷子一36和刷子二37,选择适合长度的轮轴,更换电池12,清理容杂袋35,向料仓43中补充涂料;
51.本实用新型使用时,驱动装置13运行,带动驱动轮15旋转,推动内部操作车前行,传动轮一16和传动轮二45跟随旋转;内部操作车前进至焊接处时,涂层测厚仪24通过旋转轴27进行360
°
旋转并探测涂层厚度,再将涂层厚度值传递给控制器26,控制器26判断涂层厚度值低于预设值,通过内置天线25向外控设备5发出信号,并停止驱动装置13的运行,运行制动装置14,通过传动轮一16使内部操作车停止前进;运行驱动轴一32、驱动轴二33和吸尘器34,驱动轴一32与刷子一36顺时针旋转、驱动轴二33与刷子二37逆时针旋转,清除管道内壁的锈迹,吸尘器34将掉落的锈迹吸入容杂袋35,防止管道堵塞;停止运行驱动轴一32、驱动轴二33和吸尘器34,运行喷涂泵42和旋杯44,向管道内部喷涂涂料;停止运行喷涂泵42和旋杯44,运行驱动装置13,使内部驱动车继续前进;内部操作车运行过程中,可以随时通过遥控器控制内部操作车的运行,摄像头22和探照灯23运行时,可通过旋转轴27进行360
°
旋转并拍摄管道内壁画面,可通过内置天线25和天线51将拍摄画面显示在影像显示屏53上,便于操作者观察施工质量,进行识别判断。
52.虽然结合附图对本实用新型的具体实施方式进行了详细地描述,但不应理解为对本专利的保护范围的限定。在权利要求书所描述的范围内,本领域技术人员不经创造性劳动即可作出的各种修改和变形仍属本专利的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1