一种多分度全智能碾米系统及方法与流程
1.本发明涉及大米加工技术领域,具体涉及一种多分度全智能碾米系统及方法。
背景技术:
2.通常地,收割后的稻粒需要进行种皮剥离才能成为米粒,这个过程在农业生产领域一般称之为碾米。实际上,稻谷去除种皮的厚度会影响到米粒的质量,如果种皮剥离的厚度较浅,从碾米机出来的是米粒就是糙米,如果种皮剥离的厚度较深,从碾米机出来的米粒就是精米。然而,由于不同口感的人员对米粒的精粗程度要求不同,因此人们更青睐于食用自定义的精粗程度的米粒。
3.碾米过程实际上是去种皮的过程,种皮剥离的厚度会影响大米的口感,种皮剥离得越深,大米的精度越高,同时吃起来口感相对越好。目前的碾米机大多数都不可以调节碾米精度,或者由人工进行调节碾米精度,导致调节碾米精度的准确率低,经过碾米后的大米的精度会参差不齐,无法完全满足人们的食用要求。
技术实现要素:
4.本发明的目的在于提供一种多分度全智能碾米系统及方法,以解决现有技术中,由于人工调节碾米设备的碾米精度而导致的实际碾米精度与要求的碾米精度相差较大的技术问题。
5.为解决上述技术问题,本发明具体提供下述技术方案:
6.一种多分度全智能碾米系统,包括:
7.碾米机构,用于将稻米及糙米碾成大米;
8.精度调节机构,安装在所述碾米机构内,所述精度调节机构用于调节所述碾米机构的碾米执行精度;
9.精度检测模块,设置在所述精度调节机构上并获取所述精度调节机构的碾米执行精度;
10.出料机构,所述出料机构具有用于对所述碾米机构的出料端口的多个出料通道;
11.控制机构,所述精度检测模块通讯连接,所述控制机构从所述精度检测模块获取所述碾米执行精度,并依据获取的所述碾米执行精度控制相应所述出料通道与所述碾米机构的出料端口对接。
12.作为本发明的一种优选方案,所述碾米机构包括机体、米辊、米筛和米刀,所述机体内开设有用于安装所述米辊、所述米筛和所述米刀的空腔,所述机体上安装有与连通所述空腔的供所述出料通道对接的出料端口,所述米筛同轴设置于所述米辊的朝向所述出料端口的一侧;
13.所述米刀通过所述精度调节机构活动设置于所述米辊的一侧,所述米筛和米刀均与所述米辊间隔设置,且所述米刀与所述米辊的间距通过所述精度调节机构进行调节,以调节所述碾米执行精度。
14.作为本发明的一种优选方案,所述精度调节机构包括:
15.导向组件,与所述米刀相连接,所述导向组件用于安装所述米刀及引导所述米刀在所述米辊的径向进行往复运动;
16.驱动组件,与所述米刀相连接,所述驱动组件用于驱动所述米刀在所述米辊的径向进行往复运动;
17.锁定组件,与所述米刀相连接,所述锁定组件用于在所述驱动组件停止时对所述米刀相对于所述米辊的位置进行锁定。
18.作为本发明的一种优选方案,所述导向组件包括导向板和滑块,所述导向板固定安装在所述空腔的腔壁上且位于所述米辊的径向平面内,所述导向板上沿所述米辊的径向开设有导向槽,所述滑块滑动安装在所述导向槽中,所述米刀通过所述滑块滑动安装在所述导向板上,且所述米刀通过所述滑块与安装在所述导向板上的所述驱动组件相连接。
19.作为本发明的一种优选方案,所述导向板的相对于所述米辊的外侧开设有贯穿至所述导向槽的安装孔,所述安装孔与所述导向槽位于同一直线上,所述驱动组件安装在所述导向板的外侧,且所述驱动组件通过活动在所述安装孔内的导动件于所述滑块相连接,所述锁定组件安装在所述导向板上并与所述导动件相连接,所述锁定组件依次通过所述导动件和所述滑块与所述米刀相连接。
20.作为本发明的一种优选方案,所述导动件包括中段具有螺纹的螺纹杆以及转动连接所述螺纹杆与所述滑块的球形连接头,所述安装孔的孔壁上设置有与所述螺纹杆相啮合的螺纹,且所述安装孔的孔壁上的螺纹的长度大于所述螺纹杆上的螺纹的长度,所述螺纹杆被所述驱动组件驱动转动并带动所述滑块运动,所述滑块的朝向所述安装孔的侧壁上开设有球形孔,所述球形连接头转动安装在所述球形孔中,且所述螺纹杆通过球形连接头来与所述滑块在轴向上固定连接。
21.作为本发明的一种优选方案,所述螺纹杆的螺纹的牙顶沿所述螺纹杆的轴向贯穿开设有与所述锁定组件相配合的沉槽,所述沉槽沿所述螺纹杆的周向间隔设置有多个,所述锁定组件通过与所述沉槽进行插接和分离来相应的对所述螺纹杆进行轴向上的锁定和解锁。
22.作为本发明的一种优选方案,所述锁定组件包括锁定凸条、簧片和电磁线圈,所述安装孔的孔壁上开设有与所述螺纹杆的轴线相平行的竖槽,所述锁定凸条滑动插接在所述竖槽中,且所述锁定凸条的相对于所述螺纹杆的背侧通过所述簧片支撑在所述安装孔的孔壁上,所述簧片呈拱形,且所述锁定凸条的背侧的两端均安装有所述簧片,所述电磁线圈嵌入安装在所述安装孔的孔壁中,且所述电磁线圈与所述锁定凸条的背侧正相对设置,所述锁定凸条的背侧嵌入安装有与所述电磁线圈正相对设置的衔铁片,所述衔铁片位于两端所述簧片之间。
23.作为本发明的一种优选方案,所述精度检测模块包括均设置有多个的动触头、静触头、复位弹簧和导线,多个所述静触头以及所述电磁线圈均通过与之一一对应的多个所述导线连接有同个处理芯片;
24.所述安装孔的孔壁上沿其螺纹的延伸方向等间隔开设有多个插孔,所述动触头与所述插孔滑动插接配合,所述插孔位于所述安装孔的孔壁上的螺纹的牙顶上,所述动触头位于所述插孔内的尾端与固定在所述插孔中的所述复位弹簧相连接,所述静触头固定在所
述插孔的孔壁上并位于所述复位弹簧中,所述动触头被经过的所述螺纹杆的螺纹的牙底挤压,以压缩所述复位弹簧并与所述静触头接触,使所述静触头通过所述导线向所述处理芯片反馈电平信号;
25.所述处理芯片通过监测多个所述动触点对应的电平信号的变化的情况来分析计算所述螺纹杆及所述米刀的位置,且所述处理芯片通过所述米刀的位置来分析计算此刻的所述碾米执行精度,并将所述碾米执行精度反馈至所述控制机构。
26.为解决上述技术问题,本发明还进一步提供下述技术方案:
27.一种多分度全智能碾米系统的碾米方法,包括:
28.s100、向精度调节机构输入需求碾米执行精度;
29.s200、精度检测模块在碾米前检测碾米机构的实际碾米执行精度,并将实际碾米执行精度反馈至所述精度调节机构;
30.s300、所述精度调节机构对实际碾米执行精度与需求碾米执行精度进行比对分析:
31.当实际碾米执行精度与需求碾米精度与需求碾米精度不匹配时,所述精度调节机构调节所述碾米机构的碾米执行精度,直至由所述精度检测模块反馈的实际碾米执行精度与需求碾米执行精度一致;
32.当实际碾米执行精度与需求碾米精度一致时,所述精度调节机构向所述控制机构进行反馈;
33.s400、所述控制机构根据所述精度调节机构的反馈控制所述碾米执行机构启动;
34.s500、所述控制机构从所述精度检测模块获取实际碾米执行精度,并根据实际碾米执行精度将所述碾米机构输出的大米通过对应的出料通道输出。
35.本发明与现有技术相比较具有如下有益效果:
36.本发明通过精度检测模块与精度调节机构的配合,对碾米机构的碾米执行精度进行检测和调节,具有自动化程度高、精度调节稳定以及降低人工成本的优点,并且,控制机构根据精度检测模块反馈的碾米机构的碾米执行精度,来控制出料机构的对应的出料通道将碾米机构的出料端口与用于盛放对应碾米精度的容器或加工对应碾米精度的生产线进行对接,从而达到多分度智能碾米的目的。
附图说明
37.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
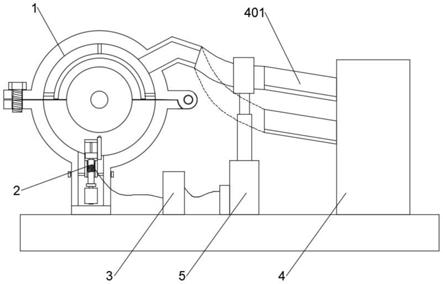
38.图1为本发明实施例的整体结构示意图;
39.图2为本发明实施例的精度调节机构结构示意图;
40.图3为本发明实施例的锁定组件结构示意图;
41.图4为本发明实施例的精度检测模块结构示意图;
42.图5为本发明实施例的导向板结构示意图;
43.图6为本发明实施例的导向组件结构示意图。
44.图中的标号分别表示如下:
[0045]1‑
碾米机构;2
‑
精度调节机构;3
‑
精度检测模块;4
‑
出料机构;5
‑
控制机构;6
‑
导向槽;7
‑
安装孔;8
‑
导动件;9
‑
球形孔;10
‑
沉槽;11
‑
插孔;
[0046]
101
‑
机体;102
‑
米辊;103
‑
米筛;104
‑
米刀;
[0047]
201
‑
导向组件;202
‑
驱动组件;203
‑
锁定组件;
[0048]
2011
‑
导向板;2012
‑
滑块;
[0049]
2031
‑
锁定凸条;2032
‑
簧片;2033
‑
电磁线圈;2034
‑
衔铁片;
[0050]
301
‑
动触头;302
‑
静触头;303
‑
复位弹簧;304
‑
导线;305
‑
处理芯片;
[0051]
401
‑
出料通道;
[0052]
801
‑
螺纹杆;802
‑
球形连接头。
具体实施方式
[0053]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0054]
如图1至图6所示,本发明提供了一种多分度全智能碾米系统,包括:
[0055]
碾米机构1,用于将稻米及糙米碾成大米;
[0056]
精度调节机构2,安装在碾米机构1内,精度调节机构2用于调节碾米机构1的碾米执行精度;
[0057]
精度检测模块3,设置在精度调节机构2上并获取精度调节机构2的碾米执行精度;
[0058]
出料机构4,出料机构4具有用于对碾米机构1的出料端口的多个出料通道401;
[0059]
控制机构5,精度检测模块3通讯连接,控制机构5从精度检测模块3获取碾米执行精度,并依据获取的碾米执行精度控制相应出料通道401与碾米机构1的出料端口对接。
[0060]
相较于现有通过人工调节进料量、出料量和米刀104位置的方式来调节碾米执行精度,本发明通过精度检测模块3与精度调节机构2的配合,对碾米机构1的碾米执行精度进行检测和调节,具有自动化程度高、精度调节稳定以及降低人工成本的优点,并且,控制机构5根据精度检测模块3反馈的碾米机构1的碾米执行精度,来控制出料机构4的对应的出料通道401将碾米机构1的出料端口与用于盛放对应碾米精度的容器或加工对应碾米精度的生产线进行对接,从而达到多分度智能碾米的目的。
[0061]
补充说明的是,控制机构5控制出料机构4的多个出料通道401的方式,例如,控制机构5根据碾米机构1当前的碾米执行精度来控制机械手选择对应的出料通道401与碾米机构1的出料端口进行对接,或将出料端口连接的出料管对接至相应的出料通道。
[0062]
其中,碾米机构1包括机体101、米辊102、米筛103和米刀104,机体101内开设有用于安装米辊102、米筛103和米刀104的空腔,机体101上安装有与连通空腔的供出料通道401对接的出料端口,米筛103同轴设置于米辊102的朝向出料端口的一侧,米刀104通过精度调节机构2活动设置于米辊102的一侧,米筛103和米刀104均与米辊102间隔设置,且米刀104与米辊102的间距通过精度调节机构2进行调节,以调节碾米执行精度。
[0063]
其中,精度调节机构2包括:
[0064]
导向组件201,与米刀104相连接,导向组件201用于安装米刀104及引导米刀104在米辊102的径向进行往复运动;
[0065]
驱动组件202,与米刀104相连接,驱动组件202用于驱动米刀104在米辊102的径向进行往复运动;
[0066]
锁定组件203,与米刀104相连接,锁定组件203用于在驱动组件202停止时对米刀104相对于米辊102的位置进行锁定。
[0067]
在进行碾米前,控制驱动组件202来调节米刀104的位置,以调节米刀104与米辊102之间的间隙大小,并在调节后通过锁定组件203对米刀104的位置进行锁定,从而调节碾米执行精度。米刀104与米辊102的间隙根据不同的稻米及糙米的尺寸以及所需要的碾米精度进行匹配对应,而实现匹配对应的方式为前期通过试验及调试数据获得,例如,通过调试试验,建立不同的品种及尺寸的稻米及糙米在达到所需碾米精度时,与米刀104与米辊102的间隙的一一对应关系的数据库,从而在碾米机构1正式进行碾米时,根据所需的碾米执行精度对应的数据库中米刀104与米辊102的间隙来控制驱动组件202驱动米刀104进行运动,并通过精度检测模块3对米刀104与米辊102的间隙进行检测,直至米刀104与米辊102的间隙与数据库中相应的数值匹配,从而实现对碾米机构1进行碾米执行精度的自动化调节。
[0068]
其中,导向组件201包括导向板2011和滑块2012,导向板2011固定安装在空腔的腔壁上且位于米辊102的径向平面内,导向板2011上沿米辊102的径向开设有导向槽6,滑块2012滑动安装在导向槽6中,米刀104通过滑块2012滑动安装在导向板2011上,且米刀104通过滑块2012与安装在导向板2011上的驱动组件202相连接。
[0069]
导向槽6和滑块2012的数量和形状,根据对米刀104的姿态及运动的稳定性的要求的不同进行设计,例如,导向板2011的至少两端设置导向槽6和滑块2012,以防止米刀104的两端因受力不均而发生偏斜。更进一步的,滑块2012位于导向槽6的两侧均具有条状凸起,而导向槽6的槽壁上具有供条状凸起的条状长槽,以实现在竖直方向上导向槽6对滑块2012的固定,从而确保滑块2012的姿态稳定,避免滑块2012在竖直方向上发生跳动而影响米刀104的稳定,确保碾米执行精度稳定。驱动组件202通过滑块2012与米刀104连接,方便了米刀104的拆卸更换,避免了拆装米刀104对驱动组件202造成的负面影响,有利于保证驱动组件202的稳定性,减少驱动组件202的调试工作,而米刀104与滑块2012的安装方式,有通过螺栓可拆卸安装、插销可拆卸安装等。
[0070]
在上述稳实施例上进一步优化的是,导向板2011的相对于米辊102的外侧开设有贯穿至导向槽6的安装孔7,安装孔7与导向槽6位于同一直线上,驱动组件202安装在导向板2011的外侧,且驱动组件202通过活动在安装孔7内的导动件8于滑块2012相连接,锁定组件203安装在导向板2011上并与导动件8相连接,锁定组件203依次通过导动件8和滑块2012与米刀104相连接。
[0071]
通过安装孔7对导动件8进行导向,并通过导动件8连接驱动组件202和滑块2012,以进一步提高滑块2012运动的稳定性,以及避免或减少米刀104的拆装对驱动组件202的稳定性造成的负面影响,从而进一步提高碾米执行精度调节的精确度及碾米执行精度的维持时长,进一步减少对精度调节机构2的维护调试次数。而锁定组件203通过对导动组件的锁定来实现对滑块2012及米刀104的位置锁定,不仅使驱动组件202和锁定组件203在安装孔7轴向上间隔分布,以利于在机体101内较小的空腔内进行安装,且避免了导动件8未锁定而
导致导动件8与驱动组件202因机体101振动等原因而发生配合精度下降的弊端,进一步提高了精度调节机构2整体的稳定性,利于精度调机构保持高精度,从而利于应用在对碾米执行精度要求严格的多分度全智能碾米系统中。
[0072]
在上述实施例上进一步优化的是,导动件8包括中段具有螺纹的螺纹杆801以及转动连接螺纹杆801与滑块2012的球形连接头802,安装孔7的孔壁上设置有与螺纹杆801相啮合的螺纹,且安装孔7的孔壁上的螺纹的长度大于螺纹杆801上的螺纹的长度,螺纹杆801被驱动组件202驱动转动并带动滑块2012运动,滑块2012的朝向安装孔7的侧壁上开设有球形孔9,球形连接头802转动安装在球形孔9中,且螺纹杆801通过球形连接头802来与滑块2012在轴向上固定连接。
[0073]
一方面,将螺纹杆801与具有螺纹的安装孔7进行啮合,不仅有阻止螺纹杆801在安装孔7中自行发生轴向移动的优点,另一方面,通过微型伺服电机、微型步进电机等作为动力源的驱动组件202来驱动螺纹杆801在螺纹孔中进行旋转并往复运动,有常识可知,相较于以推拉方式进行驱动,具有轴向移动精度高、便于控制的优点,从而进一步提高精度调节机构2的稳定性和精度。
[0074]
球形孔9的内轮廓与球形连接头802相适应,因球形连接头802与滑块2012需进行转动配合并在滑块2012滑动方向上相对固定,因此,至少球形孔9的内腔的宽度尺寸需大于其开口的宽度尺寸,而球形连接头802的大头端转动安装在球形孔9的内腔中,且球形连接头802的小头端安装在螺纹杆801的端部的圆心处,并与球形孔9的开口转动配合。例如,滑块2012为模块化结构,包括一端设置有球形孔9的接近球形的内腔的主体,以及设置有球形孔9的呈圆形的开口的端盖,而球形连接头802则包括接近球形的球形头和连接球形头与螺纹杆801的圆柱。
[0075]
螺纹杆801的螺纹的牙顶沿螺纹杆801的轴向贯穿开设有与锁定组件203相配合的沉槽10,沉槽10沿螺纹杆801的周向间隔设置有多个,锁定组件203通过与沉槽10进行插接和分离来相应的对螺纹杆801进行轴向上的锁定和解锁。
[0076]
多个沉槽10不仅在螺纹杆801的螺纹的多个牙顶的同一直线上的分布,以利于锁定组件203的插接及分离,并通过多个牙顶受力,防止单个牙顶因螺纹杆801受外力干扰而具有自动旋转趋势时,造成单个牙顶受力变形而影响螺纹杆801的旋转。且在同一直线上的多个沉槽10围绕螺杆的轴线进行周向等间隔分布,其目的是供锁定组件203在螺纹杆801每旋转固定角度时,锁定组件203均能够对螺纹杆801进行锁定,而相邻沉槽10在周向上的间距,根据对螺纹杆801轴向运动的精度要求即米刀104位置调节的精度要求而进行设定,相邻沉槽10的间距越小即表示螺旋杆每旋转更小的角度进行轴向运动时均能被锁定组件203进行锁定,但也需综合螺纹杆801的牙顶的强度进行考虑及设计。
[0077]
其中,锁定组件203包括锁定凸条2031、簧片2032和电磁线圈2033,安装孔7的孔壁上开设有与螺纹杆801的轴线相平行的竖槽,锁定凸条2031滑动插接在竖槽中,且锁定凸条2031的相对于螺纹杆801的背侧通过簧片2032支撑在安装孔7的孔壁上,簧片2032呈拱形,且锁定凸条2031的背侧的两端均安装有簧片2032,电磁线圈2033嵌入安装在安装孔7的孔壁中,且电磁线圈2033与锁定凸条2031的背侧正相对设置,锁定凸条2031的背侧嵌入安装有与电磁线圈2033正相对设置的衔铁片2034,衔铁片2034位于两端簧片2032之间。
[0078]
电磁线圈2033与驱动组件202的微型伺服电机等动力源优选的由同一终端进行控
制,以便于终端能够及时根据驱动组件202的状态来控制电磁线圈2033。具体的,当需要调节米刀104的位置即碾米执行精度时,接通电磁线圈2033的电源,使锁定凸条2031通过背部的衔铁片2034被吸引向通电的电磁线圈2033,并压缩两端的簧片2032,从而使锁定凸条2031从螺纹杆801上的沉槽10中脱离,实现对螺纹杆801的解锁,然后,驱动组件202驱动螺纹杆801旋转至少固定的角度。当驱动组件202停止后,电磁线圈2033立即断电,锁定凸条2031在两端的簧片2032的驱动下插入螺纹杆801的不同位置的沉槽10中,从而实现对螺纹杆801的锁定。
[0079]
其中,精度检测模块3包括均设置有多个的动触头301、静触头302、复位弹簧303和导线304,多个静触头302通过与之一一对应的多个导线304连接有同个处理芯片305;
[0080]
安装孔7的孔壁上沿其螺纹的延伸方向等间隔开设有多个插孔11,动触头301与插孔11滑动插接配合,插孔11位于安装孔7的孔壁上的螺纹的牙顶上,动触头301位于插孔11内的尾端与固定在插孔11中的复位弹簧303相连接,静触头302固定在插孔11的孔壁上并位于复位弹簧303中,动触头301被经过的螺纹杆801的螺纹的牙底挤压,以压缩复位弹簧303并与静触头302接触,使静触头302通过导线304向处理芯片305反馈电平信号;
[0081]
处理芯片305通过监测多个动触点对应的电平信号的变化的情况来分析计算螺纹杆801及米刀104的位置,且处理芯片305通过米刀104的位置来分析计算此刻的碾米执行精度,并将碾米执行精度反馈至控制机构5。
[0082]
具体的,建立具有多个静触头302在安装孔7中分布位置的数字化立体模型,并将具有数字化立体模型的分析计算程序烧录至处理芯片305中,处理芯片305通过检测数字化立体模型中多个静触头302的状态来分析计算螺纹杆801的位置,从而实现对螺纹杆801的位置监测,并通过分析来计算此时米刀104相对于米辊102的间距,并对比上述数据库中的对应数据,从而计算出对应的碾米检测精度。
[0083]
本发明实施例由于对应精度调节机构2进行了深度了优化设计,使精度调节机构2具有高精度和稳定性强的优选,因此,本发明通过螺纹杆801挤压动触点来触发静触头302的方式向处理芯片305反馈螺纹杆801的位置,并计算出米刀104的位置,以及根据米刀104的位置来分析计算对应的碾米执行精度,相较于直接对米刀104的位置进行检测,具有检测精度高,以及避免外界因素对精度检测模块3的检测精度的影响,例如,避免在碾米机构1运行时,因精度检测模块3与米刀104因振动频率不一而导致检测误差大的弊端。
[0084]
本发明还提供了一种多分度全智能碾米系统的方法,包括:
[0085]
s100、向精度调节机构输入需求碾米执行精度;
[0086]
s200、精度检测模块在碾米前检测碾米机构的实际碾米执行精度,并将实际碾米执行精度反馈至所述精度调节机构;
[0087]
s300、所述精度调节机构对实际碾米执行精度与需求碾米执行精度进行比对分析:
[0088]
当实际碾米执行精度与需求碾米精度与需求碾米精度不匹配时,所述精度调节机构调节所述碾米机构的碾米执行精度,直至由所述精度检测模块反馈的实际碾米执行精度与需求碾米执行精度一致;
[0089]
当实际碾米执行精度与需求碾米精度一致时,所述精度调节机构向所述控制机构进行反馈;
[0090]
s400、所述控制机构根据所述精度调节机构的反馈控制所述碾米执行机构启动;
[0091]
s500、所述控制机构从所述精度检测模块获取实际碾米执行精度,并根据实际碾米执行精度将所述碾米机构输出的大米通过对应的出料通道输出。
[0092]
以上实施例仅为本技术的示例性实施例,不用于限制本技术,本技术的保护范围由权利要求书限定。本领域技术人员可以在本技术的实质和保护范围内,对本技术做出各种修改或等同替换,这种修改或等同替换也应视为落在本技术的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1