基于运动控制的数控刀具装配系统
1.本发明涉及自动化设备生产技术领域,特别是一种基于运动控制的数控刀具装配系统。
背景技术:
2.在目前国内许多车间数控刀具的生产过程中,还一直采用的人工装配方式。由于数控刀具精度要求较高,采用这种装配方式容易造成数控刀具装配生产方案与实际生产要求的脱节,从而严重影响实际生产使用效率。一般情况下,采用人工装配方式需要耗费较长的时间,并且出现重新装配的几率也较大。在整个装配过程中,装配工作还要求对于装配人员具有丰富的装配经验,从而导致人工装配方式具有很大的局限性。
技术实现要素:
3.本发明为了有效的解决上述背景技术中的问题,提出了一种基于运动控制的数控刀具装配系统。
4.具体技术方案如下;
5.一种基于运动控制的数控刀具装配系统,包括底板和分别固定在底板上的刀头站、打胶站和手爪站,所述打胶站位于刀头站的后侧,所述手爪站位于所述打胶站和刀头站的一侧,所述刀头站包括刀头提升组件和位于其一侧的刀头拾取组件;所述刀头提升组件包括提升气缸、提升气缸固定板、刀头提升板、刀头导轨、刀头导轨固定板和刀头提升固定底板;刀头置于刀头导轨上,所述刀头导轨固定在所述刀头导轨固定板上,所述刀头导轨固定板固定在所述刀头提升固定底板上,所述刀头导轨的进料端与振动盘连接,出料端位于刀头提升板的一侧;所述刀头提升板位于刀头导轨的末端,所述刀头提升板安装在所述刀头提升气缸的活塞杆上,所述刀头提升气缸固定在所述提升气缸固定板一侧,所述提升气缸固定板底部与所述刀头提升固定底板连接;所述刀头拾取组件包括刀头拾取气缸、刀头拾取下降气缸、步进电机和丝杠导轨滑台,所述刀头拾取气缸与所述刀头拾取下降气缸的活塞杆连接,所述刀头拾取下降气缸安装在所述丝杠导轨滑台上,所述丝杠导轨滑台由所述步进电机控制其移动;所述打胶站包括胶管电机、胶仓、胶管和胶管下降气缸;所述胶管下降气缸固定在立柱上,立柱固定在所述底板上,所述胶管下降气缸的活塞杆连接有移动板,所述移动板的上部固定有所述胶管电机,所述胶管电机的输出端连接到胶仓内部的挤压盘,胶仓的侧部与所述移动板固接,胶仓的侧部设有进胶口,胶仓的下部与所述胶管连接;所述手爪站包括移动模组、伺服电机和气动手爪,所述移动模组通过支腿固定在所述底板上,所述伺服电机安装在所述移动模组的活动端,所述伺服电机的输出端与所述气动手爪连接。
6.优选地,所述伺服电机的上部安装有坦克带安装板。
7.优选地,所述振料盘固定在支架上。
8.与现有技术相比,本发明的有益效果是:本发明采用s7-200smart st30 plc加步
进电机驱动器与伺服电机驱动器相结合,能通过对步进电机与伺服电机的精确控制,进而得到高精度、高效率的数控刀具的装配。该系统不仅解决了生产的人工成本问题,更在刀具装配的工艺上提高了质量和效率。本系统同时还拥有丰富的接口预留,能满足企业或学校对该设备的拓展应用,极大地满足了不同行业不同用户的需求。
附图说明
9.图1是本发明的立体图;
10.图2是本发明中刀头站的立体图;
11.图3是本发明中刀头提升组件的主视图;
12.图4是本发明中刀头提升组件的俯视图;
13.图5是本发明中刀头提升组件的侧视图;
14.图6是本发明中刀头拾取组件的主视图;
15.图7是本发明中刀头拾取组件的俯视图;
16.图8是本发明中刀头拾取组件的侧视图;
17.图9是本发明中打胶站的立体图;
18.图10是本发明中打胶站的侧视图;
19.图11是本发明中手爪站的立体图。
具体实施方式
20.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位旋转90度或处于其他方位,并且对这里所使用的空间相对描述作出相应解释。
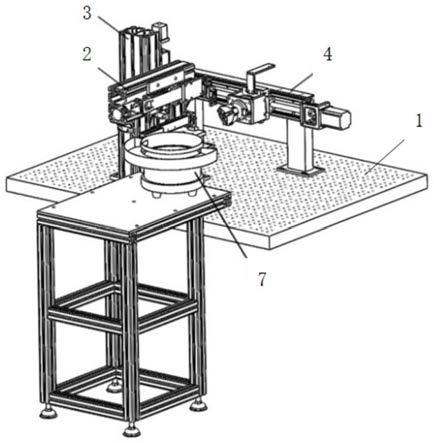
21.下面结合附图及较佳实施例详细说明本发明的具体实施方式。如图1所示,一种基于运动控制的数控刀具装配系统,包括底板1和分别固定在底板上的刀头站2、打胶站3和手爪站4,所述打胶站位于刀头站的后侧,所述手爪站位于所述打胶站和刀头站的一侧。
22.如图2所示,所述刀头站包括刀头提升组件5和位于其一侧的刀头拾取组件6;采用西门子s7-200smart st30 plc作为控制核心,运用一个鸣志步进控制系统带动机械结构并且配合俩个双杆气缸加一个气动手爪来完成对刀头的夹取与运送,从而可以提高夹取与运送的效率;通过一个振动盘7来给装置提供刀头,可以把刀头按照固定方向筛选出来运送到导轨上等待刀头提升组件顶起。待手爪站夹取刀具完成打胶在刀头站一侧就位时,通过刀头拾取组件将刀头夹起运送到刀具上完成一面装配。
23.如图3-5所示,所述刀头提升组件包括提升气缸51、提升气缸固定板52、刀头提升板53、刀头导轨54、刀头导轨固定板55和刀头提升固定底板56;刀头57置于刀头导轨内,所述刀头导轨固定在所述刀头导轨固定板上,所述刀头导轨固定板固定在所述刀头提升固定
底板上;所述刀头提升板位于刀头导轨的末端,所述刀头提升板安装在所述刀头提升气缸的活塞杆上,所述刀头提升气缸固定在所述提升气缸固定板一侧,所述提升气缸固定板底部与所述刀头提升固定底板连接。通过一个振动盘来给装置提供刀头,刀头沿着刀头导轨依次运动,运动到刀头提升板上方时,提升气缸启动,带动刀头提升板上升,将位于刀头提升板上方的刀头提升起来,通过刀头提升组件可以把运送到导轨上等待刀头提升组件顶起。
24.如图6-8所示,所述刀头拾取组件6包括刀头拾取气缸61、刀头拾取下降气缸62、步进电机63、丝杠导轨滑台64和红外传感器65;所述刀头拾取气缸与所述刀头拾取下降气缸的活塞杆连接,所述刀头拾取下降气缸安装在所述丝杠导轨滑台上,所述丝杠导轨滑台由所述步进电机控制其移动。当刀头提升组件将刀头提升起一定高度后,通过步进电机带动丝杠导轨滑台移动,从而将刀头拾取下降气缸和刀头拾取气缸移动到刀头上方位置,刀头拾取下降气缸带动刀头拾取气缸下降到刀头的位置后,刀头拾取气缸启动,夹取刀头,之后步进电机再带动丝杠导轨滑台移动,从而将刀头拾取下降气缸和刀头拾取气缸移动到手爪夹取的刀具上方位置,刀头拾取下降气缸带动刀头拾取气缸下降到刀具的位置后,刀头拾取气缸关闭,松开刀头,完成一面装配。通过红外传感器检测丝杠导轨滑台的移动位置,以确定每次夹取运送与装配的精度。
25.如图9和图10所示,所述打胶站3包括胶管电机31、胶仓32、胶管33和胶管下降气缸34;所述胶管下降气缸固定在立柱上,立柱固定在所述底板上,所述胶管下降气缸的活塞杆连接有移动板35,所述移动板的上部固定有所述胶管电机,所述胶管电机的输出端连接到胶仓内部的挤压盘,胶仓的侧部与所述移动板固接,胶仓的侧部设有进胶口36,胶仓的下部与所述胶管连接。其中进胶口外接胶源通过气压对打胶站供胶,当手爪站夹取刀具在打胶站一侧就位时,胶管下降气缸带动胶仓胶管下降到刀具的位置上,之后胶管电机带动胶仓内部的挤压盘旋转,将胶通过胶管挤到刀具上完成打胶。
26.如图11所示,所述手爪站4包括移动模组41、伺服电机42和气动手爪43,所述移动模组通过支腿固定在所述底板上,所述伺服电机安装在所述移动模组的活动端,所述伺服电机的输出端与所述气动手爪连接。所述伺服电机的上部安装有坦克带安装板44。刀具45被气动手爪夹紧。手爪站气动手爪夹取刀具,通过移动模组运送刀具到打胶站一侧进行打胶,待打胶完成后,移动模组运送刀具到刀头站一侧装配刀头,完成一面装配后,启动伺服电机旋转刀具120
°
,并重复上诉操作直至完成三面装配后,移动模组运送装配好的刀具到完成位置,气动手爪松开刀具,记录装配完成一次。
27.如图1所示,整体的工作过程如下:首先手爪站4中手爪站气动手爪夹取刀具,通过移动模组运送刀具到打胶站3等待打胶。之后打胶站胶管下降气缸带动胶仓胶管下降到刀具的位置上,胶管电机带动胶仓内部的挤压盘旋转,将胶通过胶管挤到刀具上完成打胶。之后手爪站移动模组运送刀具到刀头站2一侧等待刀头,刀头站外通过一个振动盘7来给装置提供刀头,可以把刀头按照固定方向筛选出来刀头沿着刀头导轨依次运动,运动到刀头提升板上方时,提升气缸启动,带动刀头提升板上升,将位于刀头提升板上方的刀头提升起来。当刀头提升组件将刀头提升起一定高度后,通过步进电机带动丝杠导轨滑台移动,从而将刀头拾取下降气缸和刀头拾取气缸移动到刀头上方位置,刀头拾取下降气缸带动刀头拾取气缸下降到刀头的位置后,刀头拾取气缸启动,夹取刀头,之后步进电机再带动丝杠导轨
滑台移动,从而将刀头拾取下降气缸和刀头拾取气缸移动到手爪夹取的刀具上方位置,刀头拾取下降气缸带动刀头拾取气缸下降到刀具的位置后,刀头拾取气缸关闭,松开刀头,完成一面装配。完成一面装配后,启动手爪站伺服电机旋转刀具120
°
,并重复上诉操作直至完成三面装配后,手爪站移动模组运送装配好的刀具到完成位置,气动手爪松开刀具,记录装配完成一次。
28.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1