一种基于点云的门业自动喷涂设备及喷涂方法与流程
1.本发明涉及喷涂技术领域,具体为一种基于点云的门业自动喷涂设备及喷涂方法。
背景技术:
2.在金属门业喷涂领域,一般都是使用人工进行手工喷涂,或者是采用往复机加人工喷涂方式,但是往复机喷涂采用的都是来回不间断喷涂方式,该方式会有大量油漆浪费,且产品油漆厚度无法控制,产品质量难以管控,并且部分产品边角处,难以进行喷涂覆盖,而人工喷涂需要工人长时间在喷房内,长期暴露在油漆环境中,对人身体伤害大,为解决上述问题,我们提出了一种基于点云的门业自动喷涂设备及喷涂方法。
技术实现要素:
3.针对现有技术的不足,为解决上述的问题,本发明提供如下技术方案:一种基于点云的门业自动喷涂设备,包括喷涂组件,所述喷涂组件的内部设有不完全齿轮,所述不完全齿轮的外壁啮合连接有齿框,所述齿框的顶部固定连接有齿条,所述齿条的正面啮合连接有转动齿轮,所述转动齿轮的内部固定连接有丝杆,所述丝杆的一端固定连接有偏心盘,所述丝杆的外壁固定连接有驱动齿轮,所述丝杆的外壁螺纹连接有滑套,所述滑套的顶部固定连接有限位板,所述限位板的内部滑动连接有导向杆,所述滑套的底部设有喷头组件。
4.还包括搅拌组件,所述搅拌组件的内部设有漆桶,所述漆桶的内部活动连接有螺旋搅拌杆,所述螺旋搅拌杆的底部固定连接有从动齿轮,所述漆桶的内部活动连接有u形杆,所述u形杆的外壁固定连接有锥形块,所述u形杆的外壁固定连接有连接弹簧,所述u形杆远离漆桶的一侧固定连接有横板。
5.还包括底座,所述底座的顶部固定连接有支撑架,所述支撑架的内部设有输送带,所述支撑架的内部设有喷涂组件,所述支撑架的顶部设有搅拌组件。
6.进一步的,所述不完全齿轮的背部固定连接有驱动电机,便于带动不完全齿轮转动。
7.进一步的,所述齿框内部的两侧均匀地设有齿牙,便于齿框周期性上下往复运动。
8.进一步的,所述驱动齿轮的顶部与从动齿轮的外壁啮合连接,便于带动从动齿轮转动。
9.进一步的,所述偏心盘的顶部与横板的底部滑动连接,便于间歇性带动横板运动。
10.进一步的,所述连接弹簧远离u形杆的一侧固定连接在漆桶的顶部,且所述u形杆一侧的外壁至少设置有三个锥形块,便于提高搅拌效率。
11.一种基于点云的门业自动喷涂设备的喷涂方法,系统包括喷涂检测传感器、ai照相传感器、喷涂机器人、pc电脑、ai相机;
12.喷涂检测传感器用于控制喷涂机器人喷涂;
13.ai照相传感器用于控制ai相机拍照;
14.喷涂机器人用于对待喷品进行喷涂;
15.ai相机用于采集拍摄图片;
16.pc电脑用于调节喷涂机器人的位置。
17.包括如下具体步骤:
18.s1、两个传感器接入机器人内部i/o中,ai相机与电脑通过专用通信线连接,采集拍摄图片;
19.s2、通过处理图片得到待喷物品相对于相机的位置坐标,并通过识别图像轮廓,得到点位坐标之间相应的轨迹,最终生成相应的点云轨迹;
20.s3、机器人与pc通过网线进行连接,并通过通信协议进行信号交互,当待喷物品到预设位置时,机器人发出信号给pc告诉pc可以进行拍照,ai相机拍照,相机拍完照片后,通过pc对拍照的照片进行处理,生成物品的点位坐标点,并将物品的点位坐标按照x,y,z,rx,ry,rz六个坐标值进行记录,并传送给机器人;
21.s4、机器人根据相机传送过来的点位坐标轨迹,生成机器人可以执行的点位坐标值;
22.s5、在物品到达预设位置时,对待喷物品进行喷涂处理。
23.与现有技术相比,本发明提供了一种基于点云的门业自动喷涂设备及喷涂方法,具备以下有益效果:
24.1、该基于点云的门业自动喷涂设备及喷涂方法,通过不完全齿轮带动齿框周期性上下运动,进一步使得滑套在丝杆的外壁周期性左右往复运动,此时喷头组件周期性左右往复运动,无需人工手动扶持,喷涂范围较大,避免产品边角处无法喷涂,从而达到了自动化程度高喷涂范围广避免边角处裸露的效果。
25.2、该基于点云的门业自动喷涂设备及喷涂方法,通过驱动齿轮带动从动齿轮转动,进一使得螺旋搅拌杆对漆桶内部的油漆进行搅拌,此时偏心盘周期性正反转,进一步使得锥形块在漆桶的内部间歇性上下运动,从而达到了避免油漆沉淀便于提高油漆混合均匀性提高喷涂质量的效果。
26.3、该基于点云的门业自动喷涂设备及喷涂方法,通过机器人的喷头相对于触发位置的物件的点位与相机相对于触发位置点位一致,不需要再对机器人坐标进行转换,可以有效的提高机器人的反应速度,相机采用深度智能相机,可以采集被测物品的三维点云数据,并根据图像点云,规定轨迹方向,生成点云轨迹,产生点云轨迹坐标,机器人收到待喷涂物品坐标后,等待喷物品到位置后,进行动作,能显著提高喷涂精度,便于控制油漆厚度。
附图说明
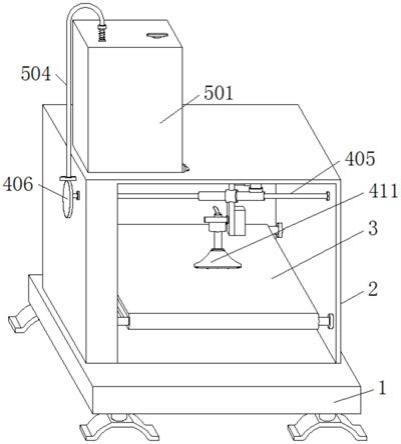
27.图1为本发明整体结构立体示意图;
28.图2为本发明整体结构剖视示意图;
29.图3为本发明齿框结构立体示意图;
30.图4为本发明图2中a结构放大示意图;
31.图5为本发明系统流程示意图;
32.图6为本发明喷涂方法流程示意图。
33.图中:1、底座;2、支撑架;3、输送带;4、喷涂组件;5、搅拌组件;401、不完全齿轮;
402、齿框;403、齿条;404、转动齿轮;405、丝杆;406、偏心盘;407、驱动齿轮;408、滑套;409、限位板;410、导向杆;411、喷头组件;501、漆桶;502、螺旋搅拌杆;503、从动齿轮;504、u形杆;505、锥形块;506、连接弹簧;507、横板。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.该基于点云的门业自动喷涂设备及喷涂方法的实施例如下:
36.请参阅图1-图6,一种基于点云的门业自动喷涂设备,包括喷涂组件4,喷涂组件4的内部设有不完全齿轮401,不完全齿轮401的背部固定连接有驱动电机,便于带动不完全齿轮401转动,不完全齿轮401的外壁啮合连接有齿框402,齿框402内部的两侧均匀地设有齿牙,便于齿框402周期性上下往复运动,齿框402的顶部固定连接有齿条403,齿条403的正面啮合连接有转动齿轮404,转动齿轮404的内部固定连接有丝杆405,丝杆405的一端固定连接有偏心盘406,丝杆405的外壁固定连接有驱动齿轮407,驱动齿轮407的顶部与从动齿轮503的外壁啮合连接,便于带动从动齿轮503转动,丝杆405的外壁螺纹连接有滑套408,滑套408的顶部固定连接有限位板409,限位板409的内部滑动连接有导向杆410,滑套408的底部设有喷头组件411。
37.还包括搅拌组件5,搅拌组件5的内部设有漆桶501,漆桶501的内部活动连接有螺旋搅拌杆502,螺旋搅拌杆502的底部固定连接有从动齿轮503,漆桶501的内部活动连接有u形杆504,u形杆504的外壁固定连接有锥形块505,u形杆504的外壁固定连接有连接弹簧506,连接弹簧506远离u形杆504的一侧固定连接在漆桶501的顶部,且u形杆504一侧的外壁至少设置有三个锥形块505,便于提高搅拌效率,u形杆504远离漆桶501的一侧固定连接有横板507,偏心盘406的顶部与横板507的底部滑动连接,便于间歇性带动横板507运动。
38.还包括底座1,底座1的顶部固定连接有支撑架2,支撑架2的内部设有输送带3,支撑架2的内部设有喷涂组件4,支撑架2的顶部设有搅拌组件5。
39.一种基于点云的门业自动喷涂设备的喷涂方法,系统包括喷涂检测传感器、ai照相传感器、喷涂机器人、pc电脑、ai相机;
40.喷涂检测传感器用于控制喷涂机器人喷涂;
41.ai照相传感器用于控制ai相机拍照;
42.喷涂机器人用于对待喷品进行喷涂;
43.ai相机用于采集拍摄图片;
44.pc电脑用于调节喷涂机器人的位置。
45.包括如下具体步骤:
46.s1、两个传感器接入机器人内部i/o中,ai相机与电脑通过专用通信线连接,采集拍摄图片;
47.s2、通过处理图片得到待喷物品相对于相机的位置坐标,并通过识别图像轮廓,得到点位坐标之间相应的轨迹,最终生成相应的点云轨迹;
48.s3、机器人与pc通过网线进行连接,并通过通信协议进行信号交互,当待喷物品到预设位置时,机器人发出信号给pc告诉pc可以进行拍照,ai相机拍照,相机拍完照片后,通过pc对拍照的照片进行处理,生成物品的点位坐标点,并将物品的点位坐标按照x,y,z,rx,ry,rz六个坐标值进行记录,并传送给机器人;
49.s4、机器人根据相机传送过来的点位坐标轨迹,生成机器人可以执行的点位坐标值;
50.s5、在物品到达预设位置时,对待喷物品进行喷涂处理。
51.工作原理:使用时,将待喷涂物品放置到输送带3的顶部,启动不完全齿轮401内部的驱动电机,此时不完全齿轮401转动,因为不完全齿轮401的外壁啮合连接有齿框402,齿框402内部的两侧均匀地设有齿牙,所以此时齿框402可以周期性上下运动,又因为齿框402的顶部固定连接有齿条403,齿条403的正面啮合连接有转动齿轮404,所以此时转动齿轮404可以周期性正反转,又因为转动齿轮404的内部固定连接有丝杆405,所以此时丝杆405也可以周期性正反转。
52.又因为丝杆405的外壁螺纹连接有滑套408,滑套408的顶部固定连接有限位板409,限位板409的内部滑动连接有导向杆410,所以此时滑套408可以在丝杆405的外壁周期性左右往复运动,又因为滑套408的底部设有喷头组件411,所以此时喷头组件411也可以周期性左右往复运动,此时无需人工手动扶持,喷涂范围较大,避免产品边角处无法喷涂,从而达到了自动化程度高喷涂范围广避免边角处裸露的效果。
53.又因为丝杆405的外壁固定连接有驱动齿轮407,驱动齿轮407的顶部与从动齿轮503的外壁啮合连接,所以此时驱动齿轮407可以带动从动齿轮503转动,又因为漆桶501的内部活动连接有螺旋搅拌杆502,螺旋搅拌杆502的底部固定连接有从动齿轮503,所以此时螺旋搅拌杆502可以对漆桶501内部的油漆进行搅拌,避免油漆沉淀。
54.又因为丝杆405的一端固定连接有偏心盘406,所以此时偏心盘406可以周期性正反转,又因为偏心盘406的顶部与横板507的底部滑动连接,所以此时横板507可以间歇性被推动,又因为u形杆504的外壁固定连接有连接弹簧506,连接弹簧506远离u形杆504的一侧固定连接在漆桶501的顶部,u形杆504远离漆桶501的一侧固定连接有横板507,所以此时在连接弹簧506的作用下u形杆504可以间歇性上下运动,又因为漆桶501的内部活动连接有u形杆504,u形杆504一侧的外壁至少设置有三个锥形块505,所以此时锥形块505可以在漆桶501的内部间歇性上下运动,此时可以提高漆桶501内部油漆的流动性,提高油漆混合的均匀性,从而达到了避免油漆沉淀便于提高油漆混合均匀性提高喷涂质量的效果。
55.机器人的喷头相对于触发位置的物件的点位必须与相机相对于触发位置点位一致,即相对于当前触发物品的水平,左右,高度一致,这样,相机生成的点位坐标就可以直接转化给机器人,不需要再对机器人坐标进行转换,可以有效的提高机器人的反应速度。
56.相机采用深度智能相机,可以采集被测物品的三维点云数据,通过图像的信息和相机的内参与外参,可以计算出任何一个像素点在世界坐标系下的坐标,并根据图像点云,规定轨迹方向,生成点云轨迹,产生点云轨迹坐标。
57.机器人收到待喷涂物品坐标后,等待喷物品到位置后,进行动作,该位置与拍照位置相对相机的位置完全一致,能显著提高喷涂精度,便于控制油漆厚度。
58.综上所述,该基于点云的门业自动喷涂设备及喷涂方法,不完全齿轮401带动齿框
402周期性上下运动,进一步使得滑套408在丝杆405的外壁周期性左右往复运动,此时喷头组件411周期性左右往复运动,无需人工手动扶持,喷涂范围较大,避免产品边角处无法喷涂,从而达到了自动化程度高喷涂范围广避免边角处裸露的效果。
59.驱动齿轮407带动从动齿轮503转动,进一使得螺旋搅拌杆502对漆桶501内部的油漆进行搅拌,此时偏心盘406周期性正反转,进一步使得锥形块505在漆桶501的内部间歇性上下运动,从而达到了避免油漆沉淀便于提高油漆混合均匀性提高喷涂质量的效果。
60.机器人的喷头相对于触发位置的物件的点位与相机相对于触发位置点位一致,不需要再对机器人坐标进行转换,可以有效的提高机器人的反应速度,相机采用深度智能相机,可以采集被测物品的三维点云数据,并根据图像点云,规定轨迹方向,生成点云轨迹,产生点云轨迹坐标,机器人收到待喷涂物品坐标后,等待喷物品到位置后,进行动作,能显著提高喷涂精度,便于控制油漆厚度。
61.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1