一种旋转式10嘴射流十字形喷头的制作方法
1.本实用新型涉及爬壁机器人技术领域,具体为一种旋转式10嘴射流十字形喷头。
背景技术:
2.爬壁机器人是可以在垂直墙壁上攀爬并完成作业的自动化机器人,爬壁机器人又称为壁面移动机器人,因为垂直壁面作业超出人的极限,因此在国外又称为极限作业机器人,爬壁机器人必须具备吸附和移动两个基本功能,而常见吸附方式有负压吸附和永磁吸附两种,爬壁机器人在多数用来焊接和除锈除漆,在除锈除漆时会在爬壁机器人上安装旋转喷头进行除锈除漆,现有的旋转喷头需要通过外部的驱动部件进行驱动旋转,但是外部的驱动部件不但会增加爬壁机器人的重量,而且会影响爬壁机器人的续航,导致爬壁机器人的移动速度较慢,使得爬壁机器人的工作效率不高。
技术实现要素:
3.鉴于现有技术中所存在的问题,本实用新型公开了一种旋转式10嘴射流十字形喷头,采用的技术方案是,包括旋转头和喷水单元;
4.旋转头:下端侧面的螺纹与底座上表面中部的螺孔螺纹连接,且旋转头的内部连通底座的内部;
5.喷水单元:包括支撑板、固定螺栓、固定块和喷水头,所述支撑板为十字形,且支撑板套接在底座上端的外侧,所述喷水头为l型,且喷水头设有四个,四个喷水头内侧一端侧面的螺纹与底座中部侧面的四个螺孔螺纹连接,且四个喷水头的内部连通底座的内部,所述固定块设有四个,四个固定块分别套接在四个喷水头中部的外侧,且四个固定块通过八个固定螺栓固定在支撑板的下表面,且横向的两个喷水头的下表面开均设有两个喷水孔,纵向的两个喷水头的下表面均开设有三个喷水孔,所述喷水孔连通喷水头的内部,设置的喷水单元可使喷水头进行旋转,在喷水头旋转的过程中不需要外部的电力驱动,可降低爬壁机器人的重量,增加爬壁机器人的续航,提高爬壁机器人的工作效率,并且在使用时可将喷水头的角度调大些可加速打击速度,角度调小点可加强打击力度,喷水孔来进行打击除锈除漆。
6.作为本实用新型的一种优选技术方案,还包括高压密封圈,所述高压密封圈套接在旋转头下端的外侧,且旋转头下端的侧面开设有与高压密封圈对应的凹槽,设置的高压密封圈可增加旋转头与底座连接处的密封性,防止连接处漏水。
7.作为本实用新型的一种优选技术方案,还包括密封圈,所述密封圈设有四个,四个密封圈分别套接在四个喷水头内侧一端的外侧,且四个喷水头内侧一端的侧面均开设有与四个密封圈对应的凹槽,设置的密封圈可对喷水头与底座之间的缝隙进行密封,防止漏水。
8.作为本实用新型的一种优选技术方案,还包括紧固螺母,所述紧固螺母设有四个,四个紧固螺母分别与四个喷水头内侧的一端螺纹连接,设置的紧固螺母可在喷水头调节角度后将喷水头锁紧,防止喷水头在工作时发生转动。
9.作为本实用新型的一种优选技术方案,还包括连接内螺纹,所述连接内螺纹固定在连接头上端的内侧面,设置的通过连接内螺纹方便的将喷头安装在爬壁机器人上。
10.作为本实用新型的一种优选技术方案,四个所述喷水头之间的夹角为九十度。
11.作为本实用新型的一种优选技术方案,所述支撑板的上表面等距离的开设有四个减重槽,设置的通过减重槽可减轻支撑板的重量,便于喷水头在喷水的过程中进行转动。
12.作为本实用新型的一种优选技术方案,还包括侧喷孔,所述侧喷孔设有十个,十个侧喷孔分别开设在四个喷水头的侧面,且十个侧喷孔分别与十个喷水孔连通,设置的侧喷孔可使在喷水孔喷水的同时向水平方向喷水,使喷水的反推力推动喷水头进行转动。
13.本实用新型的有益效果:本实用新型通过喷水孔来进行打击除锈除漆,对喷水头调整一定的角度来使喷出的水柱倾斜,使喷水头进行旋转,在喷水头旋转的过程中不需要外部的电力驱动,可降低爬壁机器人的重量,增加爬壁机器人的续航,提高爬壁机器人的工作效率,并且在使用时可将喷水头的角度调大些可加速打击速度,角度调小点可加强打击力度,通过高压密封圈可增加旋转头与底座连接处的密封性,防止连接处漏水,通过密封圈可对喷水头与底座之间的缝隙进行密封,防止漏水,通过紧固螺母可在喷水头调节角度后将喷水头锁紧,防止喷水头在工作时发生转动,通过连接内螺纹可方便的将喷头安装在爬壁机器人上,通过减重槽可减轻支撑板的重量,便于喷水头在喷水的过程中进行转动,通过侧喷孔可使在喷水孔喷水的同时向水平方向喷水,使喷水的反推力推动喷水头进行转动。
附图说明
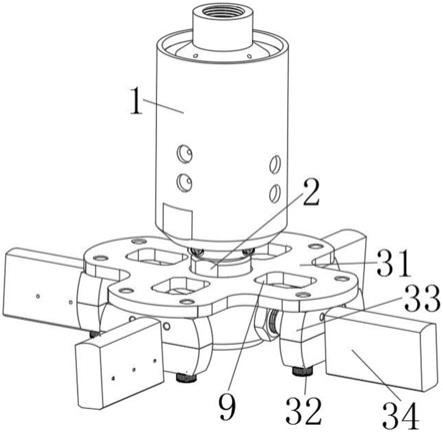
14.图1为本实用新型正面结构示意图;
15.图2为本实用新型底部结构示意图;
16.图3为本实用新型装配结构示意图;
17.图4为本实用新型喷水头内部结构示意图。
18.图中:1旋转头、2底座、3喷水单元、31支撑板、32固定螺栓、33固定块、34喷水头、4喷水孔、5高压密封圈、6密封圈、7紧固螺母、8连接内螺纹、9减重槽、10侧喷孔。
具体实施方式
19.实施例1
20.如图1至图3所示,本实用新型公开了一种旋转式10嘴射流十字形喷头,采用的技术方案是,包括旋转头1和喷水单元3;
21.旋转头1:下端侧面的螺纹与底座2上表面中部的螺孔螺纹连接,且旋转头1的内部连通底座2的内部;
22.喷水单元3:包括支撑板31、固定螺栓32、固定块33和喷水头34,所述支撑板31为十字形,且支撑板31套接在底座2上端的外侧,所述喷水头34为l型,且喷水头34设有四个,四个喷水头34内侧一端侧面的螺纹与底座2中部侧面的四个螺孔螺纹连接,且四个喷水头34的内部连通底座2的内部,所述固定块33设有四个,四个固定块33分别套接在四个喷水头34中部的外侧,且四个固定块33通过八个固定螺栓32固定在支撑板31的下表面,且横向的两个喷水头34的下表面开均设有两个喷水孔4,纵向的两个喷水头34的下表面均开设有三个喷水孔4,所述喷水孔4连通喷水头34的内部,通过喷水孔4来进行打击除锈除漆,对喷水头
34调整一定的角度来使喷出的水柱倾斜,使喷水头34进行旋转,在喷水头34旋转的过程中不需要外部的电力驱动,可降低爬壁机器人的重量,增加爬壁机器人的续航,提高爬壁机器人的工作效率,并且在使用时可将喷水头34的角度调大些可加速打击速度,角度调小点可加强打击力度。
23.作为本实用新型的一种优选技术方案,还包括高压密封圈5,所述高压密封圈5套接在旋转头1下端的外侧,且旋转头1下端的侧面开设有与高压密封圈5对应的凹槽,通过高压密封圈5可增加旋转头1与底座2连接处的密封性,防止连接处漏水。
24.作为本实用新型的一种优选技术方案,还包括密封圈6,所述密封圈6设有四个,四个密封圈6分别套接在四个喷水头34内侧一端的外侧,且四个喷水头34内侧一端的侧面均开设有与四个密封圈6对应的凹槽,通过密封圈6可对喷水34头与底座2之间的缝隙进行密封,防止漏水。
25.作为本实用新型的一种优选技术方案,还包括紧固螺母7,所述紧固螺母7设有四个,四个紧固螺母7分别与四个喷水头34内侧的一端螺纹连接,通过紧固螺母7可在喷水头34调节角度后将喷水头34锁紧,防止喷水头34在工作时发生转动。
26.作为本实用新型的一种优选技术方案,还包括连接内螺纹8,所述连接内螺纹8固定在连接头1上端的内侧面,通过连接内螺纹8方便的将喷头安装在爬壁机器人上。
27.作为本实用新型的一种优选技术方案,四个所述喷水头34之间的夹角为九十度。
28.作为本实用新型的一种优选技术方案,所述支撑板31的上表面等距离的开设有四个减重槽9,通过减重槽9可减轻支撑板31的重量,便于喷水34头在喷水的过程中进行转动。
29.作为本实用新型的一种优选技术方案,还包括侧喷孔10,所述侧喷孔10设有十个,十个侧喷孔10分别开设在四个喷水头34的侧面,且十个侧喷孔34分别与十个喷水孔4连通,通过侧喷孔10可使在喷水孔4喷水的同时向水平方向喷水,使喷水的反推力推动喷水头34进行转动。
30.本实用新型的工作原理:将紧固螺母7拧松,并将喷水头34转动至合适的角度,再将紧固螺母7锁紧,通过链接内螺纹8将旋转头1安装在爬壁机器人上,在爬壁机器人对钢铁表面进行除锈除漆时,清理的水通过爬壁机器人上的输水管输送至旋转头1内,并通过底座2将水同时输送至四个喷水头34内,通过喷水孔4将水喷出对钢铁表面铁锈和漆面进行打击,来对钢铁进行除锈除漆,在喷水孔4喷水时,由于喷水头34的角度与钢铁的表面不垂直,喷水口4喷出的水为倾斜状,喷出水柱的反推力会带动喷水头34和支撑板进行转动,同时在喷水口4喷水时,一部分的水会从喷水头34侧面的侧喷孔10喷出,对喷水头34提供横向推力,使喷水头34能够进行自转。
31.本文中未详细说明的部件为现有技术。
32.上述虽然对本实用新型的具体实施例作了详细说明,但是本实用新型并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下做出各种变化,而不具备创造性劳动的修改或变形仍在本实用新型的保护范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1