利用机器人实现喷涂工艺的方法及系统与流程
本发明涉及喷胶的,具体地,涉及一种利用机器人实现喷胶工艺的方法及系统,尤其是,优选的涉及一种利用epson机器人实现喷胶工艺的方法。
背景技术:
1、汽车电子产品在生产过程中,一般pcb(printed circuit board,印制电路板)都需要采用防水胶工艺,以防止使用过程中水气侵蚀线路板,一般采用pcb浸泡或涂抹手段。
2、公开号为cn211756230u的中国实用新型专利文献公开了一种pcb板喷胶机及pcb板生产流水线,该pcb板喷胶机包括:本体,具有对pcb板进行喷胶的作业空间;若干喷胶器,设置于所述作业空间顶部;控制装置,与所述喷胶器电连接;所述喷胶器设置有所述若干喷胶头;若干喷胶工位,设置于所述作业空间底部,并与所述喷胶器配合工作;所述喷胶工位适于放置所述pcb板。
3、针对上述中的相关技术,发明人认为上述技术手动速度慢,位置准确度低。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种利用机器人实现喷涂工艺的方法及系统。
2、根据本发明提供的一种利用机器人实现喷涂工艺的方法,包括如下步骤:
3、产品定位步骤:将产品流入移动到挡停位置;
4、产品喷涂步骤:机器人根据选型产品对位于挡停位置的产品进行喷涂;
5、产品流出步骤:对完成喷涂的产品进行流出操作。
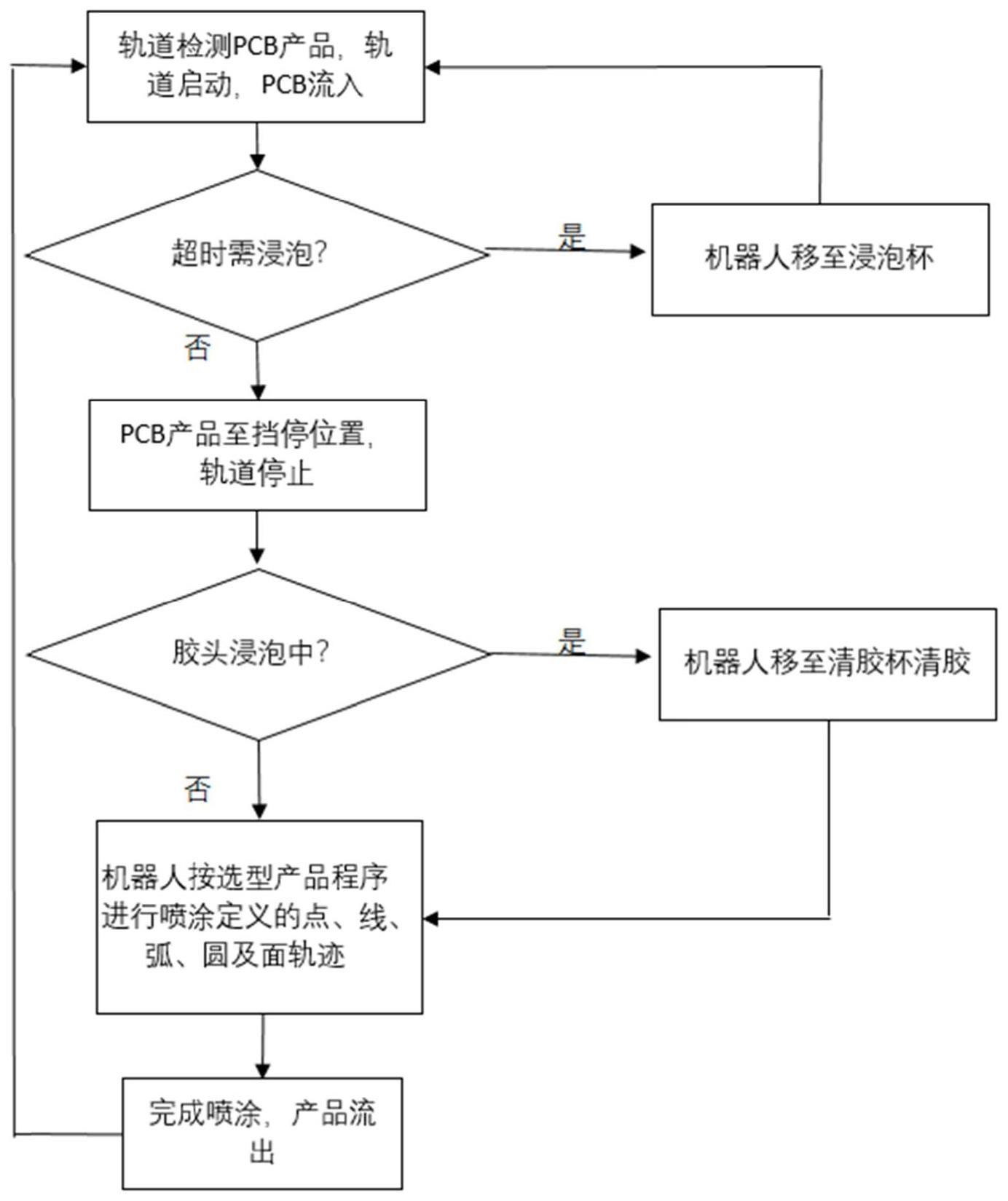
6、优选的,该方法还包括超时浸泡步骤:在等待产品流入过程中,根据预设超时时间判断喷涂液是否需要进行浸泡。
7、优选的,在所述超时浸泡步骤中,若喷涂液超过预设超时时间需要进行浸泡,将喷涂液移至浸泡器中进行浸泡,浸泡后流入产品;若喷涂液未超过预设超时时间无需进行浸泡,则直接流入产品。
8、优选的,该方法还包括喷涂头清胶步骤:在对选型产品进行喷涂前,根据喷涂头是否处于浸泡状态,判断是否需要清胶。
9、优选的,在所述喷涂头清胶步骤中,若喷涂头处于浸泡状态,则将喷涂头到清头器中进行清除后进行喷涂产品;若喷涂头未处于浸泡状态,直接使用喷涂头喷涂产品。
10、优选的,在所述产品喷涂步骤中,机器人按照选型产品程序进行喷涂定义的点、线、弧、圆及面轨迹。
11、根据本发明提供的一种利用机器人实现喷涂工艺的系统,包括如下模块:
12、产品定位模块:将产品流入移动到挡停位置;
13、产品喷涂模块:机器人根据选型产品对位于挡停位置的产品进行喷涂;
14、产品流出模块:对完成喷涂的产品进行流出操作。
15、优选的,该系统还包括超时浸泡模块:在等待产品流入过程中,根据预设超时时间判断喷涂液是否需要进行浸泡。
16、优选的,在所述超时浸泡模块中,若喷涂液超过预设超时时间需要进行浸泡,将喷涂液移至浸泡器中进行浸泡,浸泡后流入产品;若喷涂液未超过预设超时时间无需进行浸泡,则直接流入产品。
17、优选的,该系统还包括喷涂头清胶模块:在对选型产品进行喷涂前,根据喷涂头是否处于浸泡状态,判断是否需要清胶。
18、与现有技术相比,本发明具有如下的有益效果:
19、1、本发明自动速率快,位置准确度高;
20、2、本发明通过采用epson机器人及自动轨道进pcb板,解决了人工处理速度慢,位置控制不精准问题,增加了效率与位置的准确性,提高一次性良品率;
21、3、本发明通过采用epson机器人编程控制,实现点、线、弧、圆、面的喷涂轨迹运行逻辑,实现pcb产品局部按需求喷涂防水胶,实现精确控制,速度快,材料省,降低该工艺需求成本。
技术特征:
1.一种利用机器人实现喷涂工艺的方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的利用机器人实现喷涂工艺的方法,其特征在于,该方法还包括超时浸泡步骤:在等待产品流入过程中,根据预设超时时间判断喷涂液是否需要进行浸泡。
3.根据权利要求2所述的利用机器人实现喷涂工艺的方法,其特征在于,在所述超时浸泡步骤中,若喷涂液超过预设超时时间需要进行浸泡,将喷涂液移至浸泡器中进行浸泡,浸泡后流入产品;若喷涂液未超过预设超时时间无需进行浸泡,则直接流入产品。
4.根据权利要求1所述的利用机器人实现喷涂工艺的方法,其特征在于,该方法还包括喷涂头清胶步骤:在对选型产品进行喷涂前,根据喷涂头是否处于浸泡状态,判断是否需要清胶。
5.根据权利要求4所述的利用机器人实现喷涂工艺的方法,其特征在于,在所述喷涂头清胶步骤中,若喷涂头处于浸泡状态,则将喷涂头到清头器中进行清除后进行喷涂产品;若喷涂头未处于浸泡状态,直接使用喷涂头喷涂产品。
6.根据权利要求1所述的利用机器人实现喷涂工艺的方法,其特征在于,在所述产品喷涂步骤中,机器人按照选型产品程序进行喷涂定义的点、线、弧、圆及面轨迹。
7.一种利用机器人实现喷涂工艺的系统,其特征在于,包括如下模块:
8.根据权利要求7所述的利用机器人实现喷涂工艺的系统,其特征在于,该系统还包括超时浸泡模块:在等待产品流入过程中,根据预设超时时间判断喷涂液是否需要进行浸泡。
9.根据权利要求8所述的利用机器人实现喷涂工艺的系统,其特征在于,在所述超时浸泡模块中,若喷涂液超过预设超时时间需要进行浸泡,将喷涂液移至浸泡器中进行浸泡,浸泡后流入产品;若喷涂液未超过预设超时时间无需进行浸泡,则直接流入产品。
10.根据权利要求7所述的利用机器人实现喷涂工艺的系统,其特征在于,该系统还包括喷涂头清胶模块:在对选型产品进行喷涂前,根据喷涂头是否处于浸泡状态,判断是否需要清胶。
技术总结
本发明提供了一种利用机器人实现喷涂工艺的方法,包括如下步骤:产品定位步骤:将产品流入移动到挡停位置;产品喷涂步骤:机器人根据选型产品对位于挡停位置的产品进行喷涂;产品流出步骤:对完成喷涂的产品进行流出操作。本发明自动速率快,位置准确度高。
技术研发人员:杨建军,季照明
受保护的技术使用者:延锋伟世通汽车电子有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!