一种智能化微特电机异型件涂胶设备的制作方法
本发明涉及一种智能化微特电机异型件涂胶设备。
背景技术:
1、现有技术中对于异形件的涂胶,没有成品设备能够自动化实现,因此一般是只能人工操作完成,人力成本高,自动化程度低,效率低,且几乎无法避免胶液前段部均匀导致的涂胶质量不达标问题。
技术实现思路
1、为解决上述技术问题,本发明提供了一种智能化微特电机异型件涂胶设备,该智能化微特电机异型件涂胶设备能有效节约人力成本,自动化程度高,效率高,且能有效避免胶液前段部均匀导致的涂胶质量不达标问题。
2、本发明通过以下技术方案得以实现。
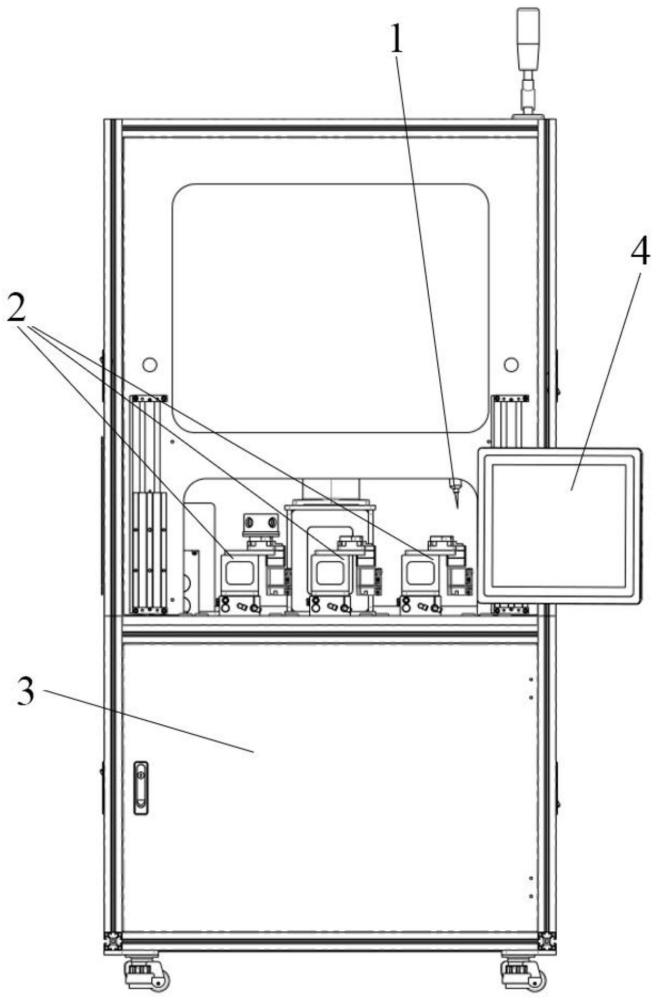
3、本发明提供的一种智能化微特电机异型件涂胶设备,包括涂胶头;所述涂胶头装在四轴机器人上,四轴机器人固定于控制器安装层上部台座,台座上有多路平行的涂胶工装,每路涂胶工装均为移动气缸带动移动工位构成;移动气缸由控制器安装层内的机器人控制器连接控制,移动气缸由台座上的控制按钮连接控制;在四轴机器人一侧有真空涂胶机装在台座上,真空涂胶机管道连接于涂胶头。
4、所述多路涂胶工装中的移动气缸长度和间距均一致,移动气缸内端靠近四轴机器人为涂胶位。
5、所述移动工位上装有转盘,转盘通过转盘转接部件连接用于安装工件的安装工装。
6、所述机器人控制器连接有人机交互界面,人机交互界面安装在台座上并位于涂胶工装侧方。
7、所述机器人控制器还连接有装在人机交互界面后方的操作按钮。
8、所述四轴机器人侧方有涂胶绘板固定在台座上,有视觉相机正对涂胶绘板固定。
9、所述移动气缸远离四轴机器人的外端正下方安装有电气控制器。
10、所述电气控制器外有安全门,安全门由安全门气缸带动,安全门气缸安装固定于台座上并位于移动气缸侧方。
11、所述四轴机器人动作端位于涂胶头上方的位置安装有定位相机和环形光源,定位相机垂直向下且定位相机的轴线和环形光源的轴心线重合。
12、所述涂胶头倾斜安装。
13、本发明的有益效果在于:能有效节约人力成本,自动化程度高,效率高,且能有效避免胶液前段部均匀导致的涂胶质量不达标问题。
技术特征:
1.一种智能化微特电机异型件涂胶设备,包括涂胶头(1),其特征在于:所述涂胶头(1)装在四轴机器人(13)上,四轴机器人(13)固定于控制器安装层(3)上部台座,台座上有多路平行的涂胶工装(2),每路涂胶工装(2)均为移动气缸(22)带动移动工位(21)构成;移动气缸(22)由控制器安装层(3)内的机器人控制器(43)连接控制,移动气缸(22)由台座上的控制按钮(23)连接控制;在四轴机器人(13)一侧有真空涂胶机(26)装在台座上,真空涂胶机(26)管道连接于涂胶头(1)。
2.如权利要求1所述的智能化微特电机异型件涂胶设备,其特征在于:所述多路涂胶工装(2)中的移动气缸(22)长度和间距均一致,移动气缸(22)内端靠近四轴机器人(13)为涂胶位(25)。
3.如权利要求1所述的智能化微特电机异型件涂胶设备,其特征在于:所述移动工位(21)上装有转盘(54),转盘(54)通过转盘转接部件(53)连接用于安装工件(51)的安装工装(52)。
4.如权利要求1所述的智能化微特电机异型件涂胶设备,其特征在于:所述机器人控制器(43)连接有人机交互界面(4),人机交互界面(4)安装在台座上并位于涂胶工装(2)侧方。
5.如权利要求4所述的智能化微特电机异型件涂胶设备,其特征在于:所述机器人控制器(43)还连接有装在人机交互界面(4)后方的操作按钮(42)。
6.如权利要求1所述的智能化微特电机异型件涂胶设备,其特征在于:所述四轴机器人(13)侧方有涂胶绘板(61)固定在台座上,有视觉相机(62)正对涂胶绘板(61)固定。
7.如权利要求1所述的智能化微特电机异型件涂胶设备,其特征在于:所述移动气缸(22)远离四轴机器人(13)的外端正下方安装有电气控制器(44)。
8.如权利要求7所述的智能化微特电机异型件涂胶设备,其特征在于:所述电气控制器(44)外有安全门,安全门由安全门气缸(63)带动,安全门气缸(63)安装固定于台座上并位于移动气缸(22)侧方。
9.如权利要求1所述的智能化微特电机异型件涂胶设备,其特征在于:所述四轴机器人(13)动作端位于涂胶头(1)上方的位置安装有定位相机(12)和环形光源(65),定位相机(12)垂直向下且定位相机(12)的轴线和环形光源(65)的轴心线重合。
10.如权利要求1所述的智能化微特电机异型件涂胶设备,其特征在于:所述涂胶头(1)倾斜安装。
技术总结
本发明提供了一种智能化微特电机异型件涂胶设备,包括涂胶头;所述涂胶头装在四轴机器人上,四轴机器人固定于控制器安装层上部台座,台座上有多路平行的涂胶工装,每路涂胶工装均为移动气缸带动移动工位构成;移动气缸由控制器安装层内的机器人控制器连接控制,移动气缸由台座上的控制按钮连接控制;在四轴机器人一侧有真空涂胶机装在台座上,真空涂胶机管道连接于涂胶头。本发明能有效节约人力成本,自动化程度高,效率高,且能有效避免胶液前段部均匀导致的涂胶质量不达标问题。
技术研发人员:雷乾勇,韦思宇,邹宝林,胡鹏,柴进,汪杰
受保护的技术使用者:贵州航天林泉电机有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!