一种振动筛闭环主动姿态控制方法及其控制系统与流程
1.本发明属于机械振动筛分技术领域,涉及一种振动筛闭环主动姿态控制方法及其控制系统,其可适用于物料分选筛分生产中。
背景技术:
2.振动筛是利用振动原理来完成筛分工艺过程并提高筛分工作效率的一类新型机械设备,广泛应用于矿山、冶金、煤炭、化工、电力、交通、环保、轻工和食品等工业部门。
3.例如中国专利申请第cn202021591336.7号公开了一种振动筛,其包括l支架,所述l支架固定连接对称的圆杆三,所述l支架固定连接两组对称的圆杆一,所述l支架固定连接横板,所述横板固定连接电机支架,所述电机支架固定连接电机,所述电机的输出轴固定连接l 形杆,对称的所述圆杆三分别穿过滑槽的一端,所述滑槽固定连接对称的方板二,对称的所述方板二分别固定连接方杆二,所述方杆二穿过l板,所述l板设置有直槽,所述l形杆的圆杆设置在所述滑槽内,所述l形杆的圆杆设置在所述直槽内,所述l板固定连接筛选机构。
4.此外,现有振动筛一般采用钢制螺旋弹簧或橡胶弹簧作为隔振部件,钢制螺旋弹簧噪音大,寿命短,容易疲劳断裂。尤其是钢制螺旋弹簧的刚度在设计范围内是线性的,当载荷发生变化时,弹簧的变形较大。橡胶弹簧与钢制螺旋弹簧相比噪音低,寿命较长,刚度是非线性的,但是在设备发生偏载时仍然会出现左右两侧的弹簧变形不一致的现象。这些构造直接导致目前的振动筛设备运行中存在如下问题。
5.1、入料端载荷突然变化时,振动筛会有前后俯仰,影响设备安全运行。
6.2、设备偏载时,振动筛会左右侧倾,影响设备安全运行。
7.3、无法及时监测设备运行姿态,无法主动调节,影响设备使用寿命。
技术实现要素:
8.基于现实和生产实践的需要,本申请人投入大量资金,并经过长期研究,提供了一种振动筛闭环主动姿态控制方法及其控制系统。
9.依据本发明专利技术方案的第一方面,提供一种振动筛闭环主动姿态控制方法,其用于给振动筛提供主动姿态控制,当控制单元判断设备运行姿态不稳时,控制单元给执行单元发出动作指令,执行单元调节隔振系统的运行参数,使设备姿态恢复正常。
10.进一步地,振动筛闭环主动姿态控制方法包括以下步骤。
11.步骤s1,监测单元实时监测振动筛的运行参数,包括压力、温度、速度、加速度、位移运行参数,并将监测数据反馈给控制单元。
12.步骤s2,控制单元将实时反馈数据与预先设置的阈值对比,判断振动筛的姿态是否正常。
13.步骤s3,若振动筛的姿态为非正常状态,控制单元发出指令给执行单元,执行单元工作并使隔振单元运行参数做出调整。
14.步骤s4,隔振单元的运行参数变化,振动筛姿态调整,返回到步骤s1,重复步骤s1和步骤s2,直至振动筛姿态恢复正常。
15.步骤s5,若振动筛的姿态为正常状态,返回到步骤s2,继续监测振动筛姿态。
16.依据本发明专利技术方案的第二方面,提供一种使用方法的振动筛闭环主动姿态控制系统,所述振动筛闭环主动姿态控制系统包括主动智能隔振控制系统,主动智能隔振控制系统包括隔振单元、监测单元、控制单元和执行单元;隔振单元起隔离振动筛的振动作用,减少设备传递给厂房的的动载荷,避免造成厂房共振;隔振单元是空气弹簧或液力减震器或电磁减震器,或者是空气弹簧或液力减震器或电磁减震器的组合形式。
17.其中,监测单元是监测振动筛运行参数的传感器,实时监测温度、压力、速度、加速度、位移、载荷运行参数,并将这些运行参数反馈给控制单元。
18.优选地,控制单元根据监测单元监测数据判断设备运行姿态是否平稳,当姿态不稳时控制单元发出动作指令给执行单元,执行单元调节隔振系统的运行参数,使振动筛筛体的姿态恢复正常。
19.优选地,控制单元是plc或单片机或dcs。执行单元是调节隔振单元运行参数的动作元件,可以是气动形式或电动形式或电磁形式。
20.进一步地,控制单元的人机界面实时显示设备运行参数,当工况发生变化时,可通过人机界面修改运行参数的设定值。
21.相比于现有技术,本发明的振动筛闭环主动姿态控制方法及其控制系统,采用闭环控制,控制精度高,有效抑制俯仰、侧倾动作,振动筛运行平稳,避免事故;本发明的振动筛闭环主动姿态控制方法及其控制系统实现振动筛的主动姿态控制,响应快,减少振动筛筛体的非平稳运行时间,延长振动筛的使用寿命。
22.此外,振动筛闭环主动姿态控制方法及其控制系统系统集成入中央控制室,实时监控振动筛运行参数,降低人工巡检时间,节能提效。
附图说明
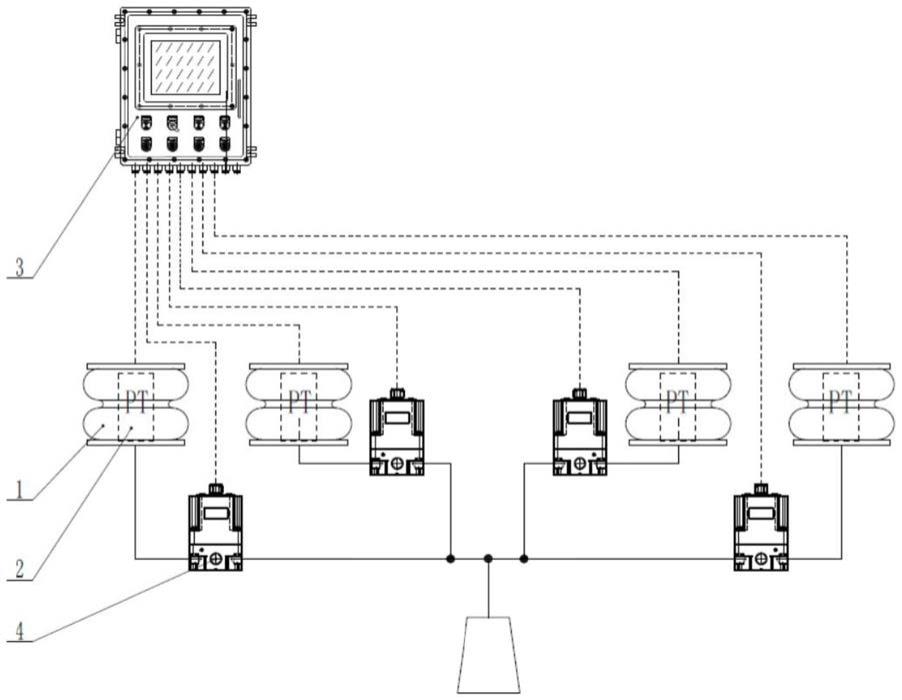
23.图1是依据本发明的振动筛闭环主动姿态控制系统的示意框图。
24.图2是依据本发明的振动筛闭环主动姿态控制方法的逻辑流程图。
25.附图1中的标记如下:1隔振单元、2监测单元、3控制单元、4执行单元。
具体实施方式
26.下面将结合本发明专利实施例中的附图,对本发明专利实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明专利的一部分实施例,而不是全部的实施例。基于本发明专利中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明专利保护的范围。
27.本发明提供一种振动筛闭环主动姿态控制系统,该系统包括主动智能隔振控制系统,主动智能隔振控制系统包括隔振单元1、监测单元2、控制单元3和执行单元4;隔振单元起隔离振动筛的振动作用,减少设备传递给厂房的的动载荷,避免造成厂房共振。隔振单元可以是空气弹簧或液力减震器或电磁减震器,或者是这几者的组合形式。
28.监测单元是监测振动筛运行参数的传感器,可以实时监测温度、压力、速度、加速
度、位移、载荷等运行参数,并将这些参数反馈给控制单元;控制单元根据监测单元监测数据判断设备运行姿态是否平稳,当姿态不稳时控制单元发出动作指令给执行单元,执行单元调节隔振系统的运行参数,使振动筛筛体的姿态恢复正常。控制单元可以是plc或单片机或dcs。
29.执行单元是调节隔振单元运行参数的动作元件,可以是气动形式或电动形式或电磁形式。
30.进一步地,隔振单元、监测单元、控制单元和执行单元组成的闭环主动智能隔振控制系统。监测单元可为监测压力、温度、速度、加速度、位移等一种或几种参数的组合的集成系统。
31.本发明提供一种振动筛闭环主动姿态控制方法,其用于给振动筛提供主动姿态控制,当控制单元判断设备运行姿态不稳时,控制单元给执行单元发出动作指令,执行单元调节隔振系统的运行参数,使设备姿态恢复正常。
32.更具体地,一种振动筛闭环主动姿态控制方法包括以下步骤。
33.步骤s1,监测单元实时监测振动筛的运行参数,包括压力、温度、速度、加速度、位移等运行参数,并将这些参数(监测数据)反馈给控制单元。
34.步骤s2,控制单元将实时反馈数据与预先设置的阈值对比,判断振动筛的姿态是否正常。步骤s3,若振动筛的姿态为非正常状态,控制单元发出指令给执行单元,执行单元工作并使隔振单元运行参数做出调整。
35.步骤s4,隔振单元的运行参数变化,振动筛姿态调整,返回到步骤s1,重复步骤s1和步骤s2,直至振动筛姿态恢复正常。
36.步骤s5,若振动筛的姿态为正常状态,返回到步骤s2,继续监测振动筛姿态。
37.所述振动筛闭环主动姿态控制方法适用于本发明的振动筛闭环主动姿态控制系统。
38.本发明解决传统振动筛上无法监测振动筛筛体姿态并控制的问题,由隔振单元、监测单元、执行单元、控制单元组成;在隔振单元中集成监测单元即传感器,传感器实时监测振动筛筛体的运行姿态,并反馈给控制单元,当入料端载荷突变或左右偏载时,控制单元调整执行单元的运行参数,使振动筛回复稳定运行姿态。
39.本发明的振动筛闭环主动姿态控制系统采用闭环控制,监测单元监测振动筛运行参数,并反馈给控制单元,当姿态发生变化时,控制单元调整执行单元的参数,使设备恢复稳定姿态。在整个调整过程中,主动参与姿态控制;并且控制单元的人机界面实时显示设备运行参数,当工况发生变化时,可通过人机界面修改运行参数的设定值,具有更宽的运行包线;同时,采用该工艺,延长了振动筛的使用寿命。
40.以上所述,仅为本发明专利较佳的具体实施方式,但本发明专利的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明专利实施例揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明专利的保护范围之内。因此,本发明专利的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1