一种MiniLED的检测分选系统的制作方法
一种miniled的检测分选系统
技术领域
1.本发明属于led检测技术领域,具体涉及一种miniled的检测分选系统。
背景技术:
2.led的点分设备的作用是将蓝膜上的led阵列按照同一光学参数和电学参数的led分选出来。通常led的点分设备分为两种,分别为芯片测试仪和芯片分选仪,两者分属两台独立的机器,带芯片的蓝膜被芯片测试仪测试完毕后,需要人工的将带芯片的蓝膜取下,并将带芯片的蓝膜放置到芯片分选仪仪上区进行二次分选。这样需要进行两次人工操作,芯片分选仪和芯片测试仪无联动,自动化程度不高,从而导致人力浪费严重,整体效率低下。
技术实现要素:
3.为解决上述问题,本发明提出了一种miniled的检测分选系统,能将芯片分选仪和芯片测试仪联动起来,大幅提升系统整体自动化程度。
4.为了达到上述目的,本发明提供如下技术方案:
5.一种miniled的检测分选系统,包括联动仪,芯片测试仪,芯片分选仪,数据传输系统,省时计算系统;所述芯片测试仪用于测试单个蓝膜上的若干阵列芯片,所述芯片分选仪用于根据芯片测试仪的数据分选单个蓝膜上已测试的若干阵列芯片,所述联动仪用于将带待测试待分选芯片的蓝膜传送至芯片测试仪上,并在测试完成后将带已测试待分选芯片的蓝膜传送至芯片分选仪上;数据传输系统用于将联动仪,芯片测试仪和芯片分选仪上操作的带芯片的蓝膜上的测试数据相互传输;省时计算系统用于根据联动仪、芯片测试仪和芯片分选仪的相互位置关系计算结合系统参数将带芯片的蓝膜分配给最优的一个芯片测试仪或芯片分选仪,联动仪把带待分选芯片的蓝膜传送至此最优芯片测试仪上进行测试,并在测试完成后将带已测试待分选芯片的蓝膜传送至最优芯片分选仪上,使得整个芯片测试分选所用总时间最少。
6.进一步的,所述联动仪包括:机械手臂、摄像头、移动系统、定位系统、机械控制系统、联动仪支撑结构、机械移动系统、联动仪存储区域;机械移动系统设置在联动仪底部带动联动仪整体移动,联动仪支撑结构设置在机械移动系统上方;定位系统连接在联动仪支撑结构上,用于为联动仪进行定位;移动系统与机械手臂连接,控制机械手臂的水平方向移动;联动仪存储区域设置在联动仪支撑结构上。
7.进一步的,省时计算系统根据芯片测试仪发送的芯片需求信号、各芯片测试仪的测试速度、联动仪的移动速度、联动仪针对各测试仪的上下料时间以及联动仪和不同芯片测试仪的相对距离综合判断综合测试时间;省时计算系统根据芯片分选仪发送的芯片需求信号、各芯片分选仪的分选速度、蓝膜上的芯片数量、联动仪的移动速度、联动仪针对各分选仪的上下料时间以及联动仪和不同芯片分选仪的相对距离综合判断综合分选时间;基于综合测试时间和综合分选时间计算整个芯片测试分选所用总时间,使得总时间最小。
8.进一步的,整个芯片测试分选所用总时间t=tc+tf,tc为综合测试时间,tf为综合
分选时间;所述综合测试时间通过下式计算:
9.tc=nc/vcn+lcn/vcl+tcn
10.vcn为第n台测试仪测试一颗芯片的测试速度,nc为蓝膜上的芯片数量,lcn为联动仪和第n个芯片测试仪的相对距离,vcl为联动仪的移动速度,tcn为联动仪针对第n个测试仪的上下料时间;
11.所述综合分选时间通过下式计算:
12.tf=nf/vfn+lfn/vfl+tfn
13.vfn为第n台分选仪分选一颗芯片的分选速度,nf为蓝膜上的芯片数量,lfn为联动仪和第n个芯片分选仪的相对距离,vfl为联动仪的移动速度,tfn为联动仪针对第n个分选仪的上下料时间。
14.进一步的,所述芯片测试仪包括:光探测头、探针、蓝膜移动装置、定位部件、测试仪支撑结构、移动马达、光隔离器件,测试仪支撑结构设置在芯片测试仪底部,光隔离器件设置在芯片测试仪外围,移动马达与蓝膜移动装置连接,用于驱动蓝膜移动装置移动,蓝膜移动装置上设置有定位部件,光探测头和探针用于测试芯片。
15.进一步的,所述芯片测试仪用于测试芯片的光学或/和结构或/和电学参数。
16.进一步的,所述芯片分选仪包括:摄像头、吸盘、旋转摆臂、固定装置、马达、飞针、带待分选芯片的蓝膜储存区域、带已分选芯片的蓝膜储存区域、带待分选芯片的蓝膜工作区、带已分选芯片的蓝膜工作区、分选仪支撑结构、气路、飞针控制系统,所述分选仪支撑结构设置在分选仪底部,马达与旋转摆臂连接,用于驱动旋转摆臂来回摆动,驱动旋转摆臂末端连接吸盘,吸盘与气路连接,固定装置为两个,分别用于固定带待分选芯片的蓝膜工作区和带已分选芯片的蓝膜工作区,带待分选芯片的蓝膜工作区顶部设置有带待分选芯片的蓝膜储存区域,带已分选芯片的蓝膜工作区顶部设置有带已分选芯片的蓝膜储存区域。
17.进一步的,所述芯片分选仪根据芯片测试仪和联动仪发过来的关于芯片的数据,根据产品的级别要求,按照同一规格的光学或/和结构或/和电学参数选出芯片。
18.进一步的,所述光学或/和结构或/和电学参数包括:芯片的峰值波长或/和主波长或/和电压或/和电流或/和光功率或/和流明或/和光谱曲线或/和半波宽或/和色品坐标或/和尺寸。
19.与现有技术相比,本发明具有如下优点和有益效果:
20.本发明通过设有的联动仪将芯片测试仪和芯片分选仪联动起来,且能获取最优测试和分选分配方案,在代替人工上下料,节省人力的同时,提高了速度,提高了效率,降低了成本,减少了操作时间,实现了自动化,增加了测试分选厂家的利润,具有极大的市场空间,值得全行业推广使用。
附图说明
21.图1为本发明提供的miniled的检测分选系统整体结构示意图。
22.图2为芯片测试仪侧视图。
23.图3为芯片分选仪侧视图。
24.图4为联动仪侧视图。
25.附图标记说明:
26.1.联动仪,11.机械手臂,12.摄像头,13.移动系统,14.定位系统,15.机械控制系统,16.联动仪支撑结构,17.机械移动系统,18.联动仪存储区域,2.芯片,3.蓝膜,4.芯片测试仪,41.光探测头,42.探针,43.蓝膜移动装置,44.定位部件,45.测试仪支撑结构,46.移动马达,47.光隔离器件,5.芯片分选仪,51.摄像头,52.吸盘,53.旋转摆臂,54.固定装置,55.马达,56.飞针,57.带待分选芯片的蓝膜储存区域,58.带已分选芯片的蓝膜储存区域,59.带待分选芯片的蓝膜工作区,510.带已分选芯片的蓝膜工作区,511.分选仪支撑结构,512.气路,6.产品出库区,数据传输系统7,省时计算系统8。
具体实施方式
27.以下将结合具体实施例对本发明提供的技术方案进行详细说明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。
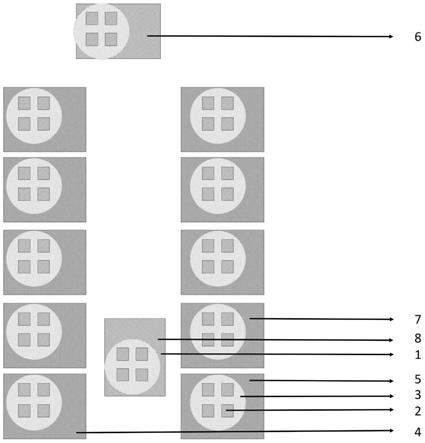
28.本发明提供了一种miniled的检测分选系统,如图1所示,至少包括联动仪1,若干芯片测试仪4,若干芯片分选仪5,数据传输系统7,省时计算系统8。图中左侧为一列芯片测试仪4,右侧为一列芯片分选仪5,中部为联动仪1,出库区6设置在系统一端。需要说明的是,图中芯片测试仪、芯片分选仪的数量和排列方式仅为示例,在实际应用中,可以根据实际需要和系统所在环境调整芯片测试仪和芯片分选仪的数量和分布方式。数据传输系统可以将联动仪,芯片测试仪和芯片分选仪上操作的带芯片的蓝膜上的测试数据相互传输。数据传输系统7仅画在芯片分选仪5上,未在其余装置上示出,其也可以设置在联动仪、芯片测试仪4上,采用适当的传输芯片,结合常规的传输功能。图中,省时计算系统8用于根据联动仪1,芯片测试仪4和芯片分选仪5的相互位置关系计算将带芯片2的蓝膜3分配给最优的一个芯片测试仪4或芯片分选仪5,使得整个芯片测试分选所用总时间最少。图中,省时计算系统8设置在联动仪1上,但其也可以根据需要独立设置,或设置在远端数据中心。定位系统7为无线定位系统71或传送齿轮定位系统72,无线定位系统为可见光定位系统711或红外定位系统712或蓝牙定位系统713,此定位系统用于定位联动仪和测试仪以及分选仪的相对位置关系,此定位系统需要在联动仪和测试仪以及分选仪分别设置对应的可见光定位系统711或红外定位系统712或蓝牙定位系统713。
29.如图2所示,芯片测试仪4至少包括光探测头41,探针42,蓝膜移动装置43,定位部件44,测试仪支撑结构45,移动马达46,光隔离器件47。测试仪支撑结构45设置在芯片测试仪4底部,用于承托带待分选芯片的蓝膜。本例中测试仪支撑机构采用支撑台。光隔离器件47设置在芯片测试仪4外围,用于隔离环境光,避免环境光影响要测试的光的强光和光谱。移动马达46与蓝膜移动装置43连接,用于驱动蓝膜移动装置43移动。蓝膜移动装置43上设置有定位部件44,用于实现蓝膜移动装置43定位,光探测头41位于光隔离器件47的内部,光探测头41位于探针42和蓝膜移动装置43和定位部件44的上部,光探测头41用于测试led的光电参数,探针42位于蓝膜移动装置43和定位部件44的上部,探针42用于连接待测芯片的电极,为led供电。探针42用于测试led芯片48。芯片测试仪4用于测试单个蓝膜3的多个阵列芯片2。芯片测试仪4测试芯片2的光学或/和结构或/和电学参数,此参数至少包括芯片的峰值波长或/和主波长或/和电压或/和电流或/和光功率或/和流明或/和光谱曲线或/和半波宽或/和色品坐标或/和尺寸。
30.如图3所示,联动仪1至少包括机械手臂11,摄像头12,移动系统13,定位系统14,机
械控制系统15,联动仪支撑结构16,机械移动系统17,联动仪存储区域18。机械移动系统17设置在联动仪1底部,用于带动联动仪1整体移动。联动仪支撑结构16设置在机械移动系统17上方,用于支撑联动仪1主体,优选采用结构简单,支撑力度合适的结构,本例中该机构为支撑台。定位系统14连接在联动仪支撑结构16上,用于为联动仪进行定位,可采用现有技术中既有的定位模块。移动系统13用于为机械手臂提供移动动力,控制机械手臂的水平方向移动,可采用易于旋转的柱体结构,如转轴等。机械手臂可采用现有技术中既有的便于夹持设置有待分选芯片的蓝膜的机械臂。摄像头12设置在联动仪1顶部,用于拍摄、采集芯片分选仪5、芯片测试仪4的位置,并发送至省时计算系统。联动仪存储区域18设置在联动仪支撑结构16上,用于放置带待分选芯片的蓝膜或带已分选芯片的蓝膜。联动仪1将带待测试待分选miniled芯片2的蓝膜3传送至芯片测试仪4上,在测试完成后,联动仪1将带已测试待分选miniled芯片2的蓝膜3传送至芯片分选仪5上。
31.联动仪1中省时计算系统根据芯片测试仪4发送的芯片需求信号、第n个芯片测试仪4的测试速度vcn、蓝膜上的芯片数量nc、联动仪1的移动速度vcl、联动仪1针对第n个测试仪4的上下料时间tcn以及联动仪1和不同芯片测试仪4的相对距离lcn综合判断综合测试最小时间对应的芯片测试仪4,综合测试时间为tc=nc/vcn+lcn/vcl+tcn,vcn代表第n台测试仪4测试一颗芯片的测试速度,lcn代表联动仪1和第n个芯片测试仪4的相对距离,将不同的芯片测试仪4的vcn、lcn和tcn带入公式tc,综合比较得出最小值对应的那个测试仪4,联动仪1把待分选miniled芯片的蓝膜传送至此综合测试最小时间对应的芯片测试仪4上进行测试;联动仪1根据芯片分选仪5发送的芯片需求信号、第n个芯片分选仪5的分选速度vfn、蓝膜上的芯片数量nf、联动仪1的移动速度vfl、联动仪1针对第n个分选仪的上下料时间tfn以及联动仪1和不同芯片分选仪5的相对距离lfn综合判断综合分选最小时间对应的芯片分选仪5,综合分选时间为tf=nf/vfn+lfn/vfl+tfn,vfn代表第n台分选仪5分选一颗芯片的分选速度,lfn代表联动仪和第n个芯片分选仪5的相对距离,将不同的芯片分选仪5的vfn、lfn和tfn带入公式tf,综合比较得出最小值对应的那个分选仪5;计算整个芯片测试分选所用总时间t=tc+tf,不同改变上面不同的参数,使得t时间最小,基于总时间最小值获得最优的测试仪和分选仪分配方案。当然,也可以不计算总时间,而分别单独计算当前最小的测试时间tc和分选时间tf,仅根据最小的测试时间或最小的分选时间,选择最优的测试仪和分选仪。
32.如图4所示,芯片分选仪至少包括摄像头51,吸盘52,旋转摆臂53,固定装置54,马达55,飞针56,带待分选芯片的蓝膜储存区域57,带已分选芯片的蓝膜储存区域58,带待分选芯片的蓝膜工作区59,带已分选芯片的蓝膜工作区510,分选仪支撑结构511,气路512,飞针控制系统513。其中,分选仪支撑结构511设置在分选仪底部,用于支撑其上的各个部件。马达55与旋转摆臂53连接,用于驱动旋转摆臂53来回摆动。驱动旋转摆臂53末端连接吸盘52,吸盘与气路512连接。固定装置54为两个,分别用于固定带待分选芯片的蓝膜工作区59和带已分选芯片的蓝膜工作区510。带待分选芯片的蓝膜工作区59顶部设置有带待分选芯片的蓝膜储存区域57,带已分选芯片的蓝膜工作区510顶部设置有带已分选芯片的蓝膜储存区域58。摄像头51设置在芯片分选仪顶部,用于定位芯片的位置和检测芯片的外观,飞针56与飞针控制系统513相连接,飞针56位于带待分选芯片的蓝膜工作区59的背面。飞针控制系统用于控制飞针工作。芯片分选仪5根据芯片测试仪4的数据分选单个蓝膜3已测试的多
个阵列芯片2。具体的,芯片分选仪5根据芯片测试仪4和联动仪1发过来的关于芯片2的数据,根据产品的级别要求,按照同一规格的光学或/和结构或/和电学参数(此参数至少包括芯片的峰值波长或/和主波长或/和电压或/和电流或/和光功率或/和流明或/和光谱曲线或/和半波宽或/和色品坐标或/和尺寸)选出芯片2。联动仪1将带已测试已分选miniled芯片2的蓝膜3传送至产品出库区6。
33.本发明方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1