一种自动高效的可回收物分类回收系统及其处理工艺的制作方法
1.本发明涉及城市固体废弃物资源处理技术领域,尤其涉及一种自动高效的可回收物分类回收系统及其处理工艺。
背景技术:
2.我国城市生活垃圾处理技术概括起来,有卫生填埋法、堆肥法、焚烧法。以上方法如果不对垃圾中的可回收物进行有效的分类处理,而简单使用任何一种处理方法,都会造成资源的极大浪费和环境的二次污染,因此现在全国多地已开始实施垃圾分类,如此可以有效不免垃圾中的可回收物浪费,有效节约资源。
3.目前垃圾分类通常分为四大类:可回收垃圾、厨余垃圾、其他垃圾以及有害垃圾。在分类处理过程中,会有多种垃圾混合在一起,对于可回收垃圾(可回收物)而言,无法直接回收利用,需要进行后续分类处理以达到可回收利用的标准。目前尚没有有效的可回收物分类处理系统及方法来实现可回收物的自动化的高效率的分类回收处理。
技术实现要素:
4.针对上述问题,本发明提出了一种自动高效的自动高效的可回收物分类回收系统及其处理工艺,来实现可回收物的自动化的高效率的分类回收处理。
5.为实现上述目的,本发明采用了如下技术方案:一种自动高效的可回收物分类回收系统,包括混合可回收物分选系统、塑料瓶回收系统、玻璃回收系统、废纸回收系统以及泡沫回收系统;所述塑料瓶回收系统、所述玻璃回收系统、所述废纸回收系统以及所述泡沫回收系统分别位于所述混合可回收物分选系统的下游。
6.一种应用自动高效的可回收物分类回收系统的可回收物分类回收处理工艺,包括如下步骤:s1:混合可回收物粗分:将收集来的混合可回收物投入到混合可回收物分选系统内进行分选,分别分选出大件织物、纸板、塑料、泡沫、铁、低值可回收物、pet瓶、有色金属、玻璃以及hdpe瓶;s2:塑料瓶精分回收处理:将s1中粗分出的以及经废品回收站收购的pet瓶或者hdpe瓶投入到塑料瓶回收系统内进行细分回收; pet瓶经分选后分别分出透明和浅蓝pet瓶、绿色pet瓶以及杂色pet瓶;hdpe瓶经分选后分别分出纯白hdpe瓶、浅色hdpe瓶以及杂色hdpe瓶,并将分选出的各类塑料瓶分别打包;s3:玻璃精分回收处理:将s1中粗分出的玻璃投入到玻璃回收系统内进行排杂、破碎和分选,最终分出纯色玻璃、绿色玻璃、灰色玻璃以及杂色玻璃并分别进行回收;s4:废纸回收处理:将s1中粗分出的废纸进行分选并打包;s5:泡沫回收处理:主要处理的目标物为废品回收站回购的泡沫,将泡沫经过泡沫冷压机冷压打包成泡沫压块。
7.优选地,所述s1步骤还包括如下分步骤:s1
‑
1:混合可回收物先上料并经过链式输送机传输到人工分选皮带机上进行人工粗分选,在人工分选皮带机转动过程中,将其上的大件的织物、纸板、塑料、泡沫分选出来;s1
‑
2:经s1
‑
1人工分选后的剩余物传送到磁选机单元选出铁并回收打包;s1
‑
3:经s1
‑
2分选后的剩余物传送到弹跳筛单元进行筛分,筛下低值可回收物进行打包转运处理;s1
‑
4:经s1
‑
3筛分后的剩余物分为3d立体物与2d平板物并分别进入到3d立体物人工分选皮带机和2d人工分选皮带机再进行人工分选,其中3d立体物经人工分选出pet瓶、硬塑料、有色金属、玻璃、hdpe瓶,2d平板物经人工分选出纸板、织物以及塑料;s1
‑
5:将上述步骤中分离出的物料归类后将需要继续精分的pet瓶、hdpe瓶、玻璃以及废纸转运到后续对应的系统内进行精分,泡沫转运到后续的泡沫回收系统进行打包处理,塑料直接外售。
8.优选地,所述s2步骤分别处理分选pet瓶和hdpe瓶,所述pet瓶和hdpe瓶的来源为经s1粗分出的以及线下回收站收购的。
9.其中,pet瓶分选包括如下分步骤:s2(1)
‑
1:将pet瓶投入到脱标机内进行物理脱标;s2(1)
‑
2:将脱标后的pet瓶经过链式输送机输送到光电分选机单元中进行分选,分别分选出透明和浅蓝pet瓶以及绿色pet瓶;s2(1)
‑
3:将s2(1)
‑
2的剩余物继续向前转运到ai智能机器人加人工分选单元进行进一步分选,分别分选出s2(1)
‑
2中未分离出的透明和浅蓝pet瓶以及绿色pet瓶,并同时分离出杂色pet瓶;s2(1)
‑
4:将s2(1)
‑
2和s2(1)
‑
3中分选出的透明和浅蓝pet瓶、绿色pet瓶、杂色pet瓶经过瓶类打包机进行打包形成各类包块,便于转运。
10.hdpe瓶分选包括如下分步骤:s2(2)
‑
1:hdpe瓶上料并经过链式输送机输送到光电分选机单元中进行分选,分别分选出纯白hdpe瓶以及浅色hdpe瓶;s2(2)
‑
2:将s2(2)
‑
1的剩余物继续向前转运到ai智能机器人加人工分选单元进行进一步分选,分别分选出s2(2)
‑
1中未分离出的纯白hdpe瓶以及浅色hdpe瓶,并同时分离出杂色hdpe瓶;s2(2)
‑
3:将s2(1)
‑
1和s2(2)
‑
2中分选出的纯白hdpe瓶以及浅色hdpe瓶、杂色hdpe瓶经过瓶类打包机进行打包形成各类包块,便于转运。
11.优选地,所述的光电分选机单元包括依次串联设置的第一光电分选机和第二光电分选机,每台光电分选机分别对应设置不同模式分别对应需要分选出的瓶子的颜色类型,在第一光电分选机上设置两种模式:模式一:仅分选出透明和浅蓝色pet瓶、模式二:仅分选出纯白hdpe瓶,第二光电分选机上设置有两种模式:模式一:仅分选绿色pet瓶、模式二:仅分选浅色hdpe瓶;在对pet瓶进行分选时,第一光电分选机和第二光电分选机均选择模式一;在对hdpe瓶进行分选时,第一光电分选机和第二光电分选机均选择模式二。
12.优选地,所述s3步骤还包括如下分步骤:s3
‑
1:将经s1粗分出的玻璃投入到玻璃回收系统内的链式输送机上并传送到人工
分选皮带机处进行人工分选,选出铁、干扰物以及平板玻璃;s3
‑
2:再将s3
‑
1的剩余物传送到双轴破碎机内进行破碎成渣;s3
‑
3:将玻璃碎渣传送到复合筛进行筛分,筛上物为塑料瓶,筛下物为玻璃渣,将塑料瓶收集并转移到s2步骤中进行细分,玻璃渣继续进行细分;s3
‑
4:将玻璃渣传送到磁选机内进行磁选,分选出铁;s3
‑
5:将除铁后的玻璃渣送入颜色分拣机进行不同颜色玻璃进行分选,其中颜色分拣机依次设置有三台,将经过磁选的玻璃渣送入到第一台颜色分拣机选出纯色玻璃并存入纯色玻璃缓存仓,然后分拣后的剩余物进入到第二台颜色分拣机选出绿色玻璃并对应存入到绿色玻璃缓存仓,再将分拣后的剩余物经过第三台颜色分拣机选出灰色玻璃并对应存入到灰色玻璃缓存仓,然后将分拣后的剩余物存入到杂色玻璃缓存仓。
13.优选地,在s4步骤中的废纸回收处理具体操作为:将s1粗分的后的废纸投入到废纸回收系统内的链式输送机上并传送到人工分选皮带机上进行杂纸分拣,将人工分选皮带机上的选出物传送到纸类打包机处进行打包,将分拣出的杂纸缓存在缓存仓内转运到纸类打包机处进行打包。
14.优选地,所述混合可回收物系统内还设置有第一智能识别系统,所述第一智能识别系统位于链式输送机下游且位于人工分选的上游,所述第一智能识别系统用于识别并统计混合可回收物内各种可回收物的含量;所述第一智能识别系统与弹跳筛下游的3d立体物人工分选皮带机以及2d平板物人工分选皮带机之间进行信息传输并发布指令控制人工分选的物品类别。
15.优选地,所述塑料瓶回收系统还包括有第二智能识别系统,所述第二智能识别系统位于所述光电分选机单元的上游,所述第二智能识别系统分别与所述第一光电分选机、所述第二光电分选机以及所述ai智能机器人加人工分选单元电性连接。
16.优选地,所述第一光电分选机内还设置有如下模式:模式三:仅分选绿色pet瓶、模式四:仅分选浅色hdpe瓶、模式五:不选透明、浅蓝以及绿色pet瓶、模式六:不选纯色以及浅色hdpe瓶;所述第二光电分选机内还设置有如下模式:模式三:仅分选透明和浅蓝pet瓶、模式四:仅分选纯色hdpe瓶、模式五:不选透明、浅蓝以及绿色pet瓶、模式六:不选纯色以及浅色hdpe瓶。
17.优选地,所述ai智能机器人加人工分选单元的选出物与所述第一光电分选机和所述第二光电分选机的选出物相同。
18.与现有技术相比,本发明的有益效果为:(1)本系统及其回收工艺对可回收物进行了系统的清晰的归类,并通过粗分和精分实现可回收物的高效的高纯度的处理和回收;(2)并通过系统自动化分拣,节省大量人力物力,且有效提高产能,同时避免了可回收物资源的浪费;(3)利用混合可回收物分选系统,能快速高效的将混合可回收物按品类粗分开来,且能够直接在此系统内实现织物、铁、塑料、有色金属以及低值可回收物的分离,并可直接回收处理,便于后续系统工作运行;(4)第一智能识别系统的设置,能有效识别并统计混合可回收物内各种可回收物的含量,且能控制3d立体物人工分选皮带机以及2d平板物人工分选皮带机进行相应的正反
选,实现更快速的物料分离,从而有效提高条分选速度,进而提高产能;(5)塑料瓶回收系统能够按照瓶子类别以及颜色进行细分,利用系统内各机器设备的分工协作,并搭配ai智能机器人加人工的提纯,实现塑料瓶的百分百精分,更便于瓶子的回收利用;(6)第二智能识别系统的设置,通过识别塑料瓶中对应颜色瓶子的含量实现正反选,即控制光电分选机优先选择含量相对较少的对应颜色的塑料瓶,则剩下的即为含量最多的对应颜色塑料瓶,通过反选的方式,极大的提高了分选效率,节约人工和机器耗损成本,提高产能;(7)两台光电分选机内设置有六种不同的模式,搭配工作,有效实现塑料瓶的自动化分类,并搭配第二智能识别系统,实现各种形式的正选反选,使塑料瓶分选系统具有足够多的分选工作模式,保证塑料瓶的高效智能分类;(8)玻璃回收系统仅通过人工分选皮带机挑出其中的铁、杂物以及平板玻璃,即可进行后续自动化回收处理产线进行自动化回收,并能按色划分回收玻璃渣,更便于后续回收利用。
附图说明
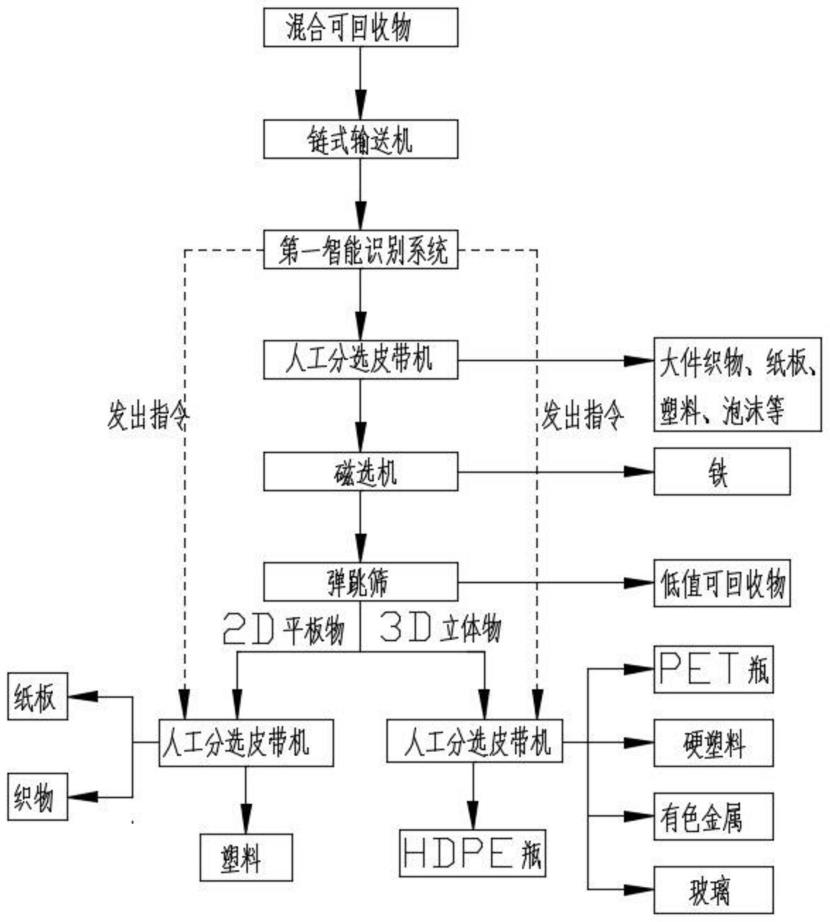
19.图1为一种自动高效的可回收物分类回收系统及其处理工艺的混合可回收物分选系统的结构流程示意图。
20.图2为一种自动高效的可回收物分类回收系统及其处理工艺的塑料瓶回收系统的结构流程示意图。
21.图3为一种自动高效的可回收物分类回收系统及其处理工艺的玻璃回收系统的结构流程示意图。
22.图4为一种自动高效的可回收物分类回收系统及其处理工艺的废纸系统的结构流程示意图。
23.图5为一种自动高效的可回收物分类回收系统及其处理工艺的泡沫回收系统的结构流程示意图。
具体实施方式
24.为使对本发明的目的、构造、特征、及其功能有进一步的了解,兹配合实施例详细说明如下。
25.请结合参照图1、图2、图3、图4和图5,本发明一实施例的一种自动高效的可回收物分类回收系统,包括混合可回收物分选系统、塑料瓶回收系统、玻璃回收系统、废纸回收系统以及泡沫回收系统;所述塑料瓶回收系统、所述玻璃回收系统、所述废纸回收系统以及所述泡沫回收系统分别位于所述混合可回收物分选系统的下游。
26.一种应用自动高效的可回收物分类回收系统的可回收物分类回收处理工艺,包括如下步骤:s1:混合可回收物粗分:将收集来的混合可回收物投入到混合可回收物分选系统内进行分选,分别分选出大件织物、纸板、塑料、泡沫、铁、低值可回收物、pet瓶、有色金属、玻璃以及hdpe瓶;
s2:塑料瓶精分回收处理:将s1中粗分出的以及经废品回收站收购的pet瓶或者hdpe瓶投入到塑料瓶回收系统内进行精分回收; pet瓶经分选后分别分出透明和浅蓝pet瓶、绿色pet瓶以及杂色pet瓶;hdpe瓶经分选后分别分出纯白hdpe瓶、浅色hdpe瓶以及杂色hdpe瓶,并将分选出的各类塑料瓶分别打包;s3:玻璃精分回收处理:将s1中粗分出的玻璃投入到玻璃回收系统内进行排杂、破碎和分选,最终分出纯色玻璃、绿色玻璃、灰色玻璃以及杂色玻璃并分别进行回收;s4:废纸回收处理:将s1中粗分出的废纸进行分选并打包;s5:泡沫回收处理:主要处理的目标物为废品回收站回购的泡沫,将泡沫经过泡沫冷压机冷压打包成泡沫压块,由于泡沫质量轻且体积大,因此,在泡沫回收时,需要对其进行冷压处理后再打包成块,如此能降低转运成本。
27.在一实施例中,所有系统均为单独的生产链,既可以搭配混合可回收物分选系统进行系统运行处理,也可以各自单独进行。即:混合可回收物分选系统主要用于将混合可回收物内的各类可回收物单独分离出来,是一个粗分的过程,无法达到百分百精准分离,但是也能将一些大件的织物、塑料、有色金属、铁以及低值可回收物等直接分离出来进行可回收处理,同时能够将pet瓶、hdpe瓶、玻璃、纸板、泡沫等先粗分出来,然后通过缓存仓进行缓存,并分别对应转运到后续的塑料瓶回收系统、玻璃回收系统、废纸回收系统、泡沫回收系统内进行对应的精分回收处理。另外,混合可回收物、塑料瓶回收系统、玻璃回收系统、废纸回收系统、泡沫回收系统均可以单独接收外来物料,比如废品回收站收购的已经进行粗分后的塑料瓶(分为pet瓶和hdpe瓶)、废纸以及泡沫,即可分别对应投入到相应的系统内进行回收处理,不用再经过混合可回收物系统进行粗分。
28.如图1所示,优选地,所述s1步骤还包括如下分步骤:s1
‑
1:混合可回收物先上料并经过链式输送机传输到人工分选皮带机上进行人工粗分选,在人工分选皮带机转动过程中,将其上的大件的织物、纸板、塑料、泡沫等快速粗分出来;s1
‑
2:经s1
‑
1人工分选后的剩余物传送到磁选机单元选出铁并回收打包;s1
‑
3:经s1
‑
2分选后的剩余物传送到弹跳筛单元进行筛分,筛下低值可回收物进行打包转运处理;s1
‑
4:经s1
‑
3筛分后的剩余物分为3d立体物与2d平板物并分别进入到3d立体物人工分选皮带机和2d人工分选皮带机再进行人工分选,其中3d立体物经人工分选出pet瓶、硬塑料、有色金属、玻璃、hdpe瓶,2d平板物经人工分选出纸板、织物以及塑料;s1
‑
5:将上述步骤中分离出的物料归类后将需要继续精分的pet瓶、hdpe瓶、玻璃以及废纸转运到后续对应的系统内进行精分,泡沫转运到后续的泡沫回收系统进行打包处理,塑料直接外售。
29.在混合回收物分选系统工作时,先选出体积较大的物料,降低混合可回收物的颗粒度,如此便于磁选机吸附铁,避免大件物品遮挡,能提高磁选效率和成功率。同时大件物品的去除,也便于弹跳筛顺利将物料弹起筛动,同时利用弹跳筛能在弹跳的过程中将物料各个分离,接触物品的粘连,并使2d平板物和3d立体物分离,利用3d立体物的弹跳性大于2d平板物,如此能直接将弹跳筛上的物料分为2d平板物和3d立体物并分别转运到2d平板物人工分选皮带机和3d立体物人工分选皮带机上进行再一次的人工分选,分选出各个不同的品
类。2d平板物和3d立体物分开进行分别分选,避免了所有物品杂糅,从而避免了物品遮挡,能够有效提高分选成功率,且能够提高分选效率,大大提高产能,相对于将弹跳筛筛分后直接分选而言,成功率更高,一台人工分选皮带机上员工需要挑选的物品种类较少,能降低员工视觉疲劳,避免眼花挑错,更便于分选工作进行,也能降低员工的劳动强度。
30.在混合可回收物分选系统内,经过粗分的旋出物按种类分别缓存在对应的缓存仓内,然后利用周转笼等转运装置向系统外转运;其中大件织物、塑料、铁、有色金属等直接装箱转运出厂,进行对应的回收处理,通常直接售卖;剩下的pet瓶、hdpe 瓶、纸板、玻璃、泡沫等分别对应转运到位于混合可回收物分选系统下游的塑料瓶回收系统、玻璃回收系统、废纸回收系统以及泡沫回收系统内进行精分并打包处理。
31.在一实施例中,由于混合回收物内各种回收物的含量不确定,也未进行统计,因此,工作流程固定,即:在来料后,上料到人工分选皮带机处直接 进行人工分选,挑选出里面的搭建织物、纸板、塑料、泡沫等,然后物料继续向前转运,进入到磁选机单元进行除铁,将混合物中的铁选出后传送到弹跳筛内,进行筛选,筛下物为低至可回收物,直接收集转运进行填埋或者其他处理,对于筛上物利用弹跳筛弹跳分离出3d立体物和2d平板物,然后分别进行无差别分选,由于此时的人工分选皮带机已经达到混合可回收物分选系统的最终端,物料不会继续向前移动,人工分选人员需要无差别的将所有的物料全部分选完成,3d立体物最终分选出pet瓶、硬塑料、有色金属、玻璃、hdpe瓶,2d平板物分选出纸板、织物以及塑料。
32.优选地,所述s2步骤分别处理分选pet瓶和hdpe瓶,所述pet瓶和hdpe瓶的来源为经s1粗分出的以及线下回收站收购的。由于pet瓶和hdpe瓶的材质不同、价值不同、用途也不同,因此在回收时分成两类并进一步分类回收处理,能最大化保证各种瓶子的利用价值。
33.如图2所示,优选地,pet瓶分选包括如下分步骤:s2(1)
‑
1:将pet瓶投入到脱标机内进行物理脱标;由于一般pet瓶常作为饮料瓶等,其外通常包裹有外标签,有时甚至全部包裹,会影响pet瓶回收利用,且不是胶粘在瓶身上的,因此,利用脱标机内的刀锋划破标签即可进行脱标,简单方便;脱标后的pet瓶,便于后续分类回收,不会影响后续pet瓶按颜色分类。
34.s2(1)
‑
2:将脱标后的pet瓶经过链式输送机输送到光电分选机单元中进行分选,分别分选出透明和浅蓝pet瓶以及绿色pet瓶;在pet瓶分选之前,现在光电分选机单元设置好程序,分别选出对应颜色的pet瓶,实现瓶子的分类。
35.s2(1)
‑
3:将s2(1)
‑
2的剩余物继续向前转运到ai智能机器人加人工分选单元进行进一步分选,分别分选出s2(1)
‑
2中未分离出的透明和浅蓝pet瓶以及绿色pet瓶,并同时分离出杂色pet瓶;由于光电分选机单元分选通常不能达到百分百精分,因此后面搭配ai智能机器人加人工分选单元,能起到有效提纯的效果,针对前面的目标物继续将漏选的选出来,并最终剩余杂色pet瓶。
36.s2(1)
‑
4:将s2(1)
‑
2和s2(1)
‑
3中分选出的透明和浅蓝pet瓶、绿色pet瓶、杂色pet瓶经过瓶类打包机进行打包形成各类包块,便于转运。
37.如图2所示,优选地,hdpe瓶分选包括如下分步骤:s2(2)
‑
1:hdpe瓶上料并经过链式输送机输送到光电分选机单元中进行分选,分别分选出纯白hdpe瓶以及浅色hdpe瓶;
s2(2)
‑
2:将s2(2)
‑
1的剩余物继续向前转运到ai智能机器人加人工分选单元进行进一步分选,分别分选出s2(2)
‑
1中未分离出的纯白hdpe瓶以及浅色hdpe瓶,并同时分离出杂色hdpe瓶;s2(2)
‑
3:将s2(1)
‑
1和s2(2)
‑
2中分选出的纯白hdpe瓶以及浅色hdpe瓶、杂色hdpe瓶经过瓶类打包机进行打包形成各类包块,便于转运。
38.在对hdpe瓶进行精分时,虽然hdpe瓶身上也有包装纸,但是多是利用黏胶贴附在瓶身上,利用物理的脱标机无法实现脱标,需要利用化学试剂溶胶后进行脱标,且通常hdpe瓶上的包装纸仅是部分包裹瓶身,不影响光电分选机单元对hdpe瓶的颜色进行区分,因此,在对hdpe瓶进行分类回收时,不经过脱标步骤,仅对其进行分类。因此hdpe瓶在上料后直接进入到光电分选机单元进行按颜色分类,先挑选纯色hdpe瓶,再挑选浅色hdpe瓶,然后讲过ai智能机器人加人工分选单元进行提纯精分,最后分离出剩下的杂色hdpe瓶,然后再将分好的隔离hdpe瓶径瓶类打包机分类打包成各类包块。
39.如图2所示,优选地,所述的光电分选机单元包括依次串联设置的第一光电分选机和第二光电分选机,每台光电分选机分别对应设置不同模式分别对应需要分选出的瓶子的颜色类型,在第一光电分选机上设置两种模式:模式一:仅分选出透明和浅蓝色pet瓶、模式二:仅分选出纯白hdpe瓶,第二光电分选机上设置有两种模式:模式一:仅分选绿色pet瓶、模式二:仅分选浅色hdpe瓶;在对pet瓶进行分选时,第一光电分选机和第二光电分选机均选择模式一;在对hdpe瓶进行分选时,第一光电分选机和第二光电分选机均选择模式二。
40.需要指出的是,第一光电分选机和第二光电分选机可以选择任意一台在前,剩余一台在后。即在布置系统时,可将第一光电分选机设置在前端,也可将第二光电分选机设置在前端。
41.由于pet瓶在分类回收时通常分为三类:纯色和浅蓝pet瓶、绿色pet瓶以及杂色pet瓶,hdpe瓶在分类回收时通常分为三类:纯白hdpe瓶、浅色hdpe瓶以及杂色hdpe瓶,因此仅需要两台光电分选机挑出两种类型的pet瓶或者hdpe瓶,剩余的即为第三类的pet瓶或者hdpe瓶。
42.如此,一实施例中的塑料瓶精选流程为:如果来料是pet瓶,则先经过脱标机脱标后进入第一光电分选机选出透明、浅蓝pet瓶,然后经过第二光电分选机选出绿色pet瓶,再经过ai智能机器人加人工分选单元进行提纯,分选出光电分选机单元未被分出的透明、浅蓝pet瓶以及绿色pet瓶,最后剩下的即为杂色的pet瓶。
43.如果来料是hdpe瓶,则直接进入到第一光电分选机选出纯白hdpe瓶,然后经过第二光电分选机选出浅色hdpe瓶,再经过ai智能机器人加人工分选单元进行提纯,分选出光电分选机单元未被分出的纯白hdpe瓶和浅色hdpe瓶,最后剩下的即为杂色hdpe瓶。
44.如图3所示,优选地,所述s3步骤还包括如下分步骤:s3
‑
1:将经s1粗分出的玻璃投入到玻璃回收系统内的链式输送机上并传送到人工分选皮带机处进行人工分选,选出铁、干扰物以及平板玻璃;此操作能够挑出不能被后续步骤处理,且会影响后续工位 工作的大块的铁和其他不易变形的干扰物,以免对后续设备造成破坏,甚至使整个系统停止运转。
45.s3
‑
2:再将s3
‑
1的剩余物传送到双轴破碎机内进行破碎成渣;双周破碎机,破碎效
率高,能避免漏网,将玻璃破碎后,便于与混在玻璃内的塑料瓶等物进行分离,成功分离出玻璃渣,且在玻璃的最终回收时,也是回收玻璃渣,进行重熔,破碎的玻璃渣,更便于玻璃的熔化。
46.s3
‑
3:将玻璃碎渣传送到复合筛进行筛分,筛上物为塑料瓶,筛下物为玻璃渣,将塑料瓶收集并转移到s2步骤中进行细分,玻璃渣继续进行细分;利用复合筛筛分的方式,能够快速分离玻璃渣,且能起到一个过滤的效果。
47.s3
‑
4:将玻璃渣传送到磁选机内进行磁选,分选出铁,此时选出的铁为粒径较小的铁钉等物,起到进一步提纯的效果。
48.s3
‑
5:将除铁后的玻璃渣送入颜色分拣机进行不同颜色玻璃进行分选,其中颜色分拣机依次设置有三台,将经过磁选的玻璃渣送入到第一台颜色分拣机选出纯色玻璃并存入纯色玻璃缓存仓,然后分拣后的剩余物进入到第二台颜色分拣机选出绿色玻璃并对应存入到绿色玻璃缓存仓,再将分拣后的剩余物经过第三台颜色分拣机选出灰色玻璃并对应存入到灰色玻璃缓存仓,然后将分拣后的剩余物存入到杂色玻璃缓存仓。由于在实际生活中,纯色玻璃、绿色玻璃和灰色玻璃使用较多,因此单独分拣出来,便于直接回收利用,剩余的杂色玻璃另外处理,不在本系统的处理范围。
49.优选地,在s4步骤中的废纸回收处理具体操作为:将s1粗分的后的废纸投入到废纸回收系统内的链式输送机上并传送到人工分选皮带机上进行杂纸分拣,将人工分选皮带机上的选出物传送到纸类打包机处进行打包,将分拣出的杂纸缓存在缓存仓内转运到纸类打包机处进行打包。由于废纸经过粗选后均为纸类,在精选时,仅需要将其中的品质较好的废纸选出,剩余的杂纸存放在缓存仓内,堆积到一定量后即可也进行打包售卖。
50.如图1所示,在二实施例中,所述混合可回收物系统内还设置有第一智能识别系统,所述第一智能识别系统位于链式输送机下游且位于人工分选的上游,所述第一智能识别系统用于识别并统计混合可回收物内各种可回收物的含量;所述第一智能识别系统与弹跳筛下游的3d立体物人工分选皮带机以及2d平板物人工分选皮带机之间进行信息传输并发布指令控制人工分选的物品类别。
51.第一智能识别系统的设置,能有效识别并统计混合可回收物内各种可回收物的含量,且能控制3d立体物人工分选皮带机以及2d平板物人工分选皮带机进行相应的正反选,实现更快速的物料分离,从而有效提高分选速度,进而提高产能。
52.添加第一智能识别系统后,二实施例的具体实施方式为:先上料,通过链式输送机输送过程中,第一智能识别系统识别处经过其检测识别的整条线路上的混合可回收物中各种可回收物的对应含量并统计对应的含量数据。判断出各种物料的占比。然后可回收物继续向下流动进入人工分选皮带机进行初步人工分选,挑选出大件织物、纸板、塑料、泡沫等,然后进入到磁选机单元选出混合可回收物中的铁,在转移到弹跳筛单元进行筛分,筛下低值可回收物,并将筛上物分为3d立体物和2d平板物,此时第一智能识别系统,向2d平板物人工分选皮带机和3d立体物人工分选皮带机工位处发出指令,对3d立体物和2d平板物中含量最多的可回收物均不选,仅选择含量占比第二名以及占比更少的可回收物,如此即剩下了占比最多的3d立体物和2d平板物,此时不用对其进行分选即可得到该目标分选物,实现物料的反选。由于在混合可回收物的最末端的人工分选平台,需要将所有目标可回收物均分选出来,在此实施例中,利用第一智能识别系统识别处各
种目标可回收物中含量最高的3d和2d可回收物,对应剔除不选,仅选择其他的,如此能极大的降低人工分选的工作量,并实现物料的快速分离,极大的提高混合可回收物分选系统的产能。
53.举例说明:如果在上料后识别出混合可回收物中hdpe瓶和体积相对较小的平板类塑料含量最多,经过整条混合可回收混合物分选系统分选后到达最后端的人工分选皮带机工位,第一智能识别系统向该工位发出指令,不选hdpe瓶和塑料,此时在3d立体物人工分选皮带机上工作人员分选pet瓶、硬塑料、有色金属、玻璃等,剩下hdpe瓶不挑选,在2d平板物人工分选皮带机上工作人员分选纸板和织物,不分选塑料,如此在皮带机上对应剩下的含量占比最多的hdpe瓶和塑料也得到了分类,直接转移到对弈内的周转笼内即可。极大的缩短了人工分选的时间,提高了分选效率和速率。
54.需要指出的是,本发明是将可能的可回收物均涵盖在内的,在实际工作处理时,可能仅存在其中的少数几种。
55.如图2所示,优选地,所述塑料瓶回收系统还包括有第二智能识别系统,所述第二智能识别系统位于所述光电分选机单元的上游,所述第二智能识别系统分别与所述第一光电分选机、所述第二光电分选机以及所述ai智能机器人加人工分选单元电性连接。更进一步地,所述第一光电分选机内还设置有如下模式:模式三:仅分选绿色pet瓶、模式四:仅分选浅色hdpe瓶、模式五:不选透明、浅蓝以及绿色pet瓶、模式六:不选纯色以及浅色hdpe瓶;所述第二光电分选机内还设置有如下模式:模式三:仅分选透明和浅蓝pet瓶、模式四:仅分选纯色hdpe瓶、模式五:不选透明、浅蓝以及绿色pet瓶、模式六:不选纯色以及浅色hdpe瓶。
56.在此实施例中,第二智能识别系统分别控制第一光电分选机、第二光电分选机以及ai智能机器人加人工分选单元,分别对他们发出指令,执行相应操作。
57.此实施例的具体实施为:塑料瓶上料,在进入光电分选机单元前,先经过第二智能识别系统,对塑料瓶中各种颜色瓶子含量进行识别并统计数据,得到统计数据后向后续的第一光电分选机、第二光电分选机以及ai智能机器人加人工分选单元依次发出指令。由于在前述部分已经说明,塑料瓶不管是pet瓶还是hdpe瓶,均按颜色分为三类,利用两台光电分选机选出两类,则剩余的即为第三类。此时,第二智能识别系统向第一光电分选机发布指令使其仅选择含量占比第二位的瓶子,第二智能识别系统向第二光电分选机发布指令使其仅选择含量占比第三位的瓶子,第二智能识别系统向ai智能机器人加人工分选单元发布指令使其仅选择含量占比第二位和第三位的瓶子,如此既剩余含量最多的瓶子自动剩下并被分选出来。此种不选最多的瓶子的反选方式,有效的降低了光电分选机单元的工作时间,也降低了光电分选机漏选的可能性,从而也降低了ai智能机器人加人工分选单元的工作量,有效提高了整个系统的工作效率,极大的提高了产能。
58.而对比一实施例的设备预先设定好选择模式,不管来料多少,以及来料各种颜色瓶子的颜色占比多少,均按照预先设定的程序执行分选工作,加入智能识别系统,实现反选,可以规避掉不选含量最多的,缩短挑选时间。比如,如果来料中占比第一的物料占到80%,则仅需要挑选出占比20%的另外两类物料,从而能极大的提高产能,也降低设备耗损,提高整个系统的使用寿命。
59.举例说明,以来料为pet瓶为例:
将所有pet瓶上料并通过链式输送机向系统内输送,经过第二智能识别系统识别统计各种类pet瓶的含量后继续向前运送。经第二智能识别系统识别统计后发现杂色pet瓶占比70%,透明、浅蓝pet瓶占比20%,绿色pet瓶占比10%,则智能识别系统给第一光电分选机发布指令选择模式一,给第二光电分选机发布指令选择模式一,给ai智能机器人加人工分选单元发布指令选择透明、浅蓝pet瓶和绿色pet瓶。指令发布后,第一光电分选机执行模式一选出透明、浅蓝pet瓶,第二光电分选机执行模式一选出绿色pet瓶,ai智能机器人加人工分选单元对应选择透明、浅蓝pet瓶和绿色pet瓶,则剩下的就都是杂色pet瓶,不用经过分选即可得到,如此极大的缩短了分选时间,提高了分选效率。
60.第一光电分选机和第二光电分选机内分别设置有对应六种模式,能实现各类塑料瓶的各种分选模式,同时也可根据实际情况再进行添加。
61.所述ai智能机器人加人工分选单元的选出物与所述第一光电分选机和所述第二光电分选机的选出物相同。ai智能机器人加人工分选单元是对光电分选机单元选出物进行提纯精选的,从而达到百分百的分选率,因此,ai智能机器人加人工分选单元的目标物与光电分选机单元的选出物相同,从而实现提纯效果。经过ai智能机器人加人工分选单元提纯后,即得到需要分选的剩下的第三种目标物。
62.当然对应的ai机器人内也设置有相应的选择模式,具体选择的目标物为第一光电分选机和第二光电分选机的目标物相加。
63.由上所述,本发明的自动高效的可回收物分类回收系统及其处理工艺,对可回收物进行了系统的清晰的归类,并通过粗分和精分实现可回收物的高效的高纯度的处理和回收;并通过系统自动化分拣,节省大量人力物力,且有效提高产能,同时避免了可回收物资源的浪费;在混合可回收物分选系统以及塑料瓶回收系统内增设智能识别系统,能实现物料的反选,即先选含量少的,剩下的就是含量高的,如此能有效提高生产效率,同时节约人工和设备成本。
64.本发明已由上述相关实施例加以描述,然而上述实施例仅为实施本发明的范例。必需指出的是,已揭露的实施例并未限制本发明的范围。相反地,在不脱离本发明的精神和范围内所作的更动与润饰,均属本发明的专利保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1