一种全自动离心装置及生物质培养容器的批量处理设备的制作方法
1.本实用新型属于生物质培养处理技术领域,具体涉及一种全自动离心装置及生物质培养容器的批量处理设备。
背景技术:
2.在生物实验中,操作人员会经常使用生物质培养容器来培养生物质,培养容器在培养箱内完成对生物质的培养后,拿出培养箱外还需要进行频繁的开盖、合盖、加液、移液、摇晃、离心等处理。
3.生物质培养后的离心处理中涉及到对培养后的生物质移液到离心管内进行离心处理,也会涉及到对相关的液体进行离心后移液添加到生物质培养容器中与生物质混合,但目前这些操作多离不开操作人员的辅助进行,操作效果低下,而且还可能会对生物质造成污染。
技术实现要素:
4.本实用新型所要解决的技术问题是提供一种全自动离心装置及生物质培养容器的批量处理设备,实现到对生物质离心处理的全自动化,提高操作效果,避免操作人员与生物质的接触,保证生物质处理过程无污染。
5.本实用新型解决上述技术问题所采用的技术方案为:提出一种全自动离心装置,包括:
6.上料架,其用于放置待离心处理的离心管;
7.下料架,其用于放置离心处理后的离心管;
8.离心机,其用于离心管的离心处理;
9.放置架,其上设有若干放置位,所述放置位用于放置离心后待移液到培养容器内的离心管;
10.抓取机构,包括机械夹爪,所述机械夹爪滑动连接在第一直线模组上,所述第一直线模组带动机械夹爪横向滑动,所述抓取机构用于在所述上料架、离心机和离心机、放置架以及离心机、下料架之间抓取移动离心管;
11.开盖机构,其设置在所述放置架的上方,包括旋盖组件和第三直线模组,所述第三直线模组带动所述旋盖组件竖向滑动,所述开盖机构用于对所述放置位上的离心管进行开盖以及将离心管盖盖在对应的离心管上。
12.与现有技术相比,本实用新型的优点在于:使用时,操作人员或机械手将待离心的离心管放置在上料架,之后启动抓取机构,机械夹爪沿第一直线模组横向滑动,从上料架上取下离心管并移动放置在离心机上,利用离心机对离心管进行离心处理,离心处理后机械夹爪将离心后的离心管移动至放置架上,放置在放置架上的放置位上,然后通过开盖机构对其进行开盖操作,方便离心后的液体移液添加到生物质培养容器中与生物质混合,移液完成后,再由开盖机构对离心管进行合盖操作,之后由抓取机构的机械夹爪将该离心管拿
取移动放置在下料架上,方便操作人员的处理。本实用新型的全自动离心装置也可以用于将放置在放置架上待离心处理的生物质离心管通过机械夹爪移动至离心机上进行离心处理,离心处理后,由机械夹爪将其移动放置在下料架上,以便操作人员的后续处理。所以本实用新型实现了生物质培养后的全自动离心操作,极大地提高了操作效果,而且减少了操作人员与生物质的接触,保证离心处理的无菌性,减少了对生物质的污染。
13.在上述的一种全自动离心装置,所述离心机包括离心机转子,所述离心机转子周向上设有若干间隔均布的放置槽,所述放置槽用于放置待离心的离心管。离心机转子带动放置在放置槽内的离心管转动,对离心管进行离心处理。
14.在上述的一种全自动离心装置,所述放置架滑动连接在第四直线模组上,所述第四直线模组带动所述放置架横向移动。放置架可沿第四直线模组横向移动,方便放置架上离心后的离心管移液到生物质培养容器中,也方便放置架上的离心管移动至抓取机构的一侧处,方便机械夹爪对离心管的抓取和移动,满足使用需要。
15.在上述的一种全自动离心装置,所述放置架上对应所述放置位设有夹紧机构,所述夹紧机构用于对所述放置位上的离心管进行夹紧。通过夹紧机构对放置位上的离心管进行夹紧,避免放置架移动过程中离心管晃动。
16.在上述的一种全自动离心装置,所述夹紧机构为工业型平行电爪。平行电爪是一种成熟的产品,本实用新型中不再进行详细描述。
17.在上述的一种全自动离心装置,所述第一直线模组上滑动连接有第一连接板,所述第一连接板上设有第二直线模组,所述第二直线模组上滑动连接有第二连接板,所述机械夹爪设置在所述第二连接板上,所述第二直线模组带动所述机械夹爪竖向滑动。机械夹爪滑动连接在第二直线模组上,可在第二直线模组上上下滑动,根据需要调整机械夹爪在竖向上的高度的位置,同时机械夹爪可通过第一直线模组调整其在横向上的位置,方便机械夹爪对离心管的抓取。
18.在上述的一种全自动离心装置,所述机械夹爪为伺服旋转电爪。伺服旋转电爪是一款成熟的产品,可实现旋转、夹爪等功能。
19.在上述的一种全自动离心装置,所述旋盖组件包括若干旋盖夹爪,若干所述旋盖夹爪转动连接在第三连接板上,所述第三连接板滑动连接在第三直线模组上,所述第三连接板上设有电机,若干所述旋盖夹爪间设有同步带,所述同步带的一端与电机相连,所述电机通过同步带带动若干所述旋盖夹爪旋转。需要对离心管进行开盖时,通过第三直线模组将旋盖夹爪下降,使离心管的盖子嵌入在旋盖夹爪内,之后通过同步带带动旋盖夹爪正转,同时第三直线模组带动旋盖夹爪向上移动,实现对离心管的开盖操作。对离心管进行合盖时,第三直线模组将旋盖夹爪下降,使得旋盖夹爪内的离心管的盖子放置在离心管的上方,之后电机带动旋盖夹爪反转,同时第三直线模组带动旋盖夹爪下降,将离心管的盖子旋紧在离心管上,实现离心管的合盖操作。
20.在上述的一种全自动离心装置,所述旋盖夹爪与所述第三连接板之间设有转动柱。
21.本实用新型解决上述技术问题所采用的技术方案为:提出一种生物质培养容器的批量处理设备,包括上述的全自动离心装置,所述全自动离心装置设置在固定板上,所述上料架、下料架、离心机和放置架分别并列设置在所述第一直线模组的一侧,而且本实用新型
中第一直线模组和第四直线模组垂直设置在固定板上,结构紧凑,减小了全自动离心装置占用的空间范围。
附图说明
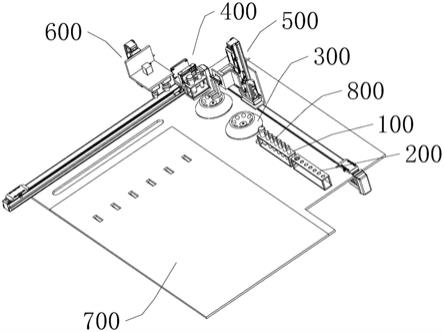
22.图1为本实用新型一个实施方案的整体结构示意图;
23.图2为本实用新型一个实施方案的离心机的结构示意图;
24.图3为本实用新型一个实施方案的放置架的结构示意图;
25.图4为本实用新型一个实施方案的抓取机构的结构示意图;
26.图5为本实用新型一个实施方案的开该机构的结构示意图。
27.图中,100、上料架;200、下料架;300、离心机;310、离心机转子;320、放置槽;400、放置架;410、放置位;420、第四直线模组;430、夹紧机构;500、抓取机构;510、机械夹爪;520、第一直线模组;530、第一连接板;540、第二直线模组;550、第二连接板;600、开盖机构;610、旋盖夹爪;620、第三连接板;630、电机;640、转动柱;650、同步带;660、第三直线模组;700、固定板;800、离心管。
具体实施方式
28.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
29.如图1所示,本实用新型一种全自动离心装置,包括:上料架100,其用于放置待离心处理的离心管800;下料架200,其用于放置离心处理后的离心管800;离心机300,其用于离心管800的离心处理;放置架400,其上设有若干放置位410,放置位410用于放置离心后待移液到培养容器内的离心管800;抓取机构500,包括机械夹爪510,机械夹爪510滑动连接在第一直线模组520上,第一直线模组520带动机械夹爪510横向滑动,抓取机构500用于在上料架100、离心机300和离心机300、放置架400以及离心机300、下料架200之间抓取移动离心管800;开盖机构600,其设置在放置架400的上方,包括旋盖组件和第三直线模组660,第三直线模组660带动旋盖组件竖向滑动,开盖机构600用于对放置位410上的离心管800进行开盖以及将离心管800盖盖在对应的离心管800上。
30.如图2所示,离心机300包括离心机转子310,离心机转子310周向上设有若干间隔均布的放置槽320,放置槽320用于放置待离心的离心管800。离心机转子310带动放置在放置槽320内的离心管800转动,对离心管800进行离心处理。
31.如图3所示,放置架400滑动连接在第四直线模组420上,第四直线模组420带动放置架400横向移动。放置架400可沿第四直线模组420横向移动,方便放置架400上离心后的离心管800移液到生物质培养容器中,也方便放置架400上的离心管800移动至抓取机构500的一侧处,方便机械夹爪510对离心管800的抓取和移动,满足使用需要。放置架400上对应放置位410设有夹紧机构430,夹紧机构430用于对放置位410上的离心管800进行夹紧。通过夹紧机构430对放置位410上的离心管800进行夹紧,避免放置架400移动过程中离心管800晃动。夹紧机构430为工业型平行电爪。平行电爪是一种成熟的产品,本实用新型中不再进行详细描述。
32.如图4所示,第一直线模组520上滑动连接有第一连接板530,第一连接板530上设
有第二直线模组540,第二直线模组540上滑动连接有第二连接板550,机械夹爪510设置在第二连接板550上,第二直线模组540带动机械夹爪510竖向滑动。机械夹爪510滑动连接在第二直线模组540上,可在第二直线模组540上上下滑动,根据需要调整机械夹爪510在竖向上的高度的位置,同时机械夹爪510可通过第一直线模组520调整其在横向上的位置,方便机械夹爪510对离心管800的抓取。机械夹爪510为伺服旋转电爪。伺服旋转电爪是一款成熟的产品,可实现旋转、夹爪等功能。
33.如图5所示,旋盖组件包括若干旋盖夹爪610,若干旋盖夹爪610转动连接在第三连接板620上,第三连接板620滑动连接在第三直线模组660上,第三连接板620上设有电机630,若干旋盖夹爪610间设有同步带650,同步带650的一端与电机630相连,电机630通过同步带650带动若干旋盖夹爪610旋转。旋盖夹爪610与所述第三连接板620之间设有转动柱640。
34.如图1所示,本实用新型一种生物质培养容器的批量处理设备,包括上述的全自动离心装置,全自动离心装置设置在固定板700上,上料架100、下料架200、离心机300和放置架400分别并列设置在第一直线模组520的一侧,而且本实用新型中第一直线模组520和第四直线模组420垂直设置在固定板700上,结构紧凑,减小了全自动离心装置占用的空间范围。
35.工作原理:使用时,操作人员或机械手将待离心的离心管800放置在上料架100,之后启动抓取机构500,机械夹爪510沿第一直线模组520横向滑动,从上料架100上取下离心管800并移动放置在离心机300上,利用离心机300对离心管800进行离心处理,离心处理后机械夹爪510将离心后的离心管800移动至放置架400上,放置在放置架400上的放置位410上,然后通过开盖机构600对其进行开盖操作,方便离心后的液体移液添加到生物质培养容器中与生物质混合,移液完成后,再由开盖机构600对离心管800进行合盖操作,之后由抓取机构500的机械夹爪510将该离心管800拿取移动放置在下料架200上,方便操作人员的处理。本实用新型的全自动离心装置也可以用于将放置在放置架400上待离心处理的生物质离心管800通过机械夹爪510移动至离心机300上进行离心处理,离心处理后,由机械夹爪510将其移动放置在下料架200上,以便操作人员的后续处理。
36.需要对离心管800进行开盖时,通过第三直线模组660将旋盖夹爪610下降,使离心管800的盖子嵌入在旋盖夹爪610内,之后通过同步带650带动旋盖夹爪610正转,同时第三直线模组660带动旋盖夹爪610向上移动,实现对离心管800的开盖操作。对离心管800进行合盖时,第三直线模组660将旋盖夹爪610下降,使得旋盖夹爪610内的离心管800的盖子放置在离心管800的上方,之后电机630带动旋盖夹爪610反转,同时第三直线模组660带动旋盖夹爪610下降,将离心管800的盖子旋紧在离心管800上,实现离心管800的合盖操作。
37.所以本实用新型实现了生物质培养后的全自动离心操作,极大地提高了操作效果,而且减少了操作人员与生物质的接触,保证离心处理的无菌性,减少了对生物质的污染。
38.本文中所描述的具体实施例仅仅是对本实用新型作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1