一种带有定位和检测的物流料道的制作方法
本技术涉及物流料道,尤其涉及一种带有定位和检测的物流料道。
背景技术:
1、物流料道即用于工件检测的设备,目前市面上大多数缸盖毛坯表面结构不一,在打标机打标前,需依靠工人肉眼进行识别,效率不佳,且极易出现错误,对此需进行改进。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在打标机打标前,需依靠工人肉眼进行识别,效率不佳,且极易出现错误,的缺点,而提出的一种带有定位和检测的物流料道。
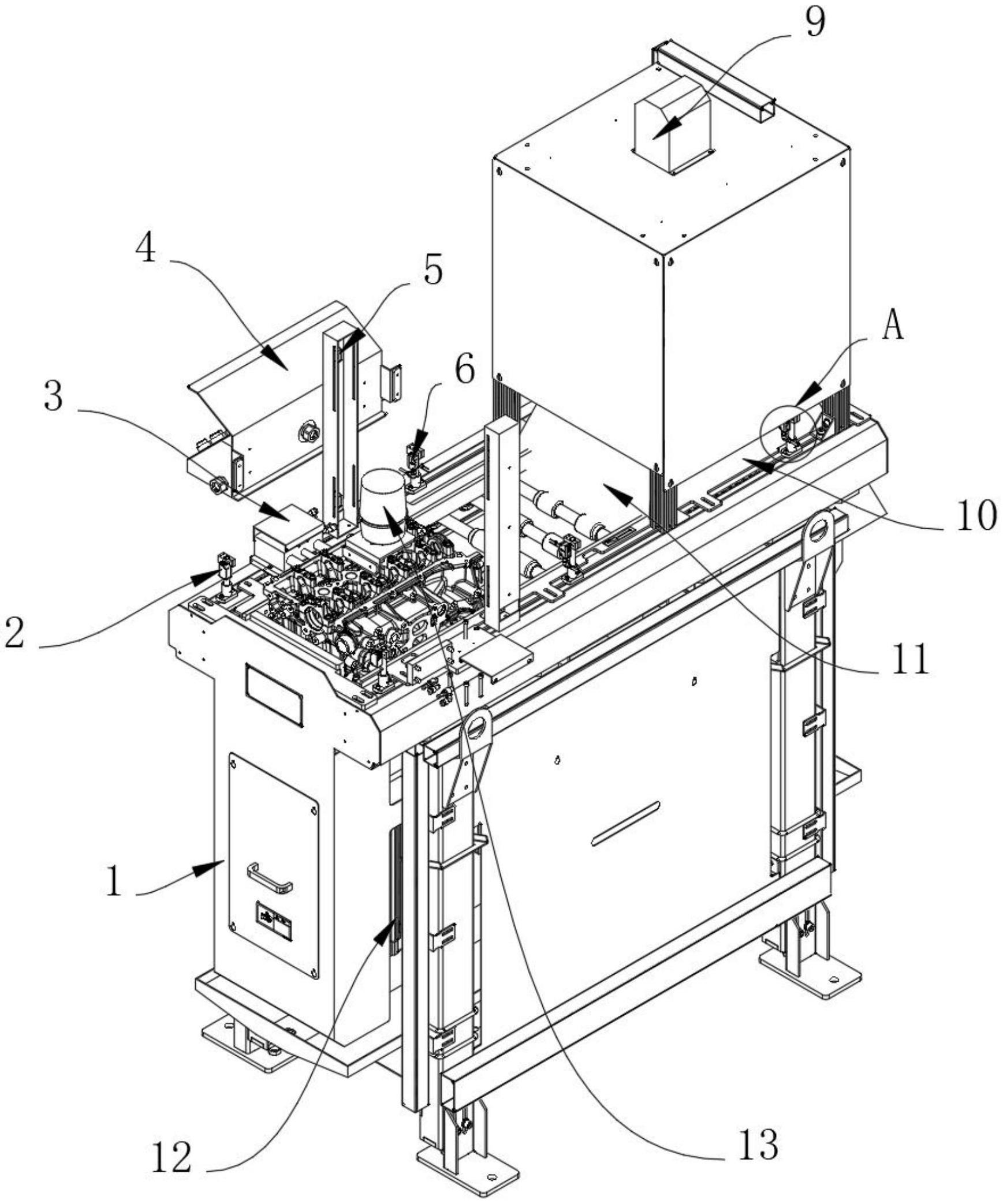
2、为了实现上述目的,本实用新型采用了如下技术方案:一种带有定位和检测的物流料道,包括机身、到位传感器和工件定位气缸,所述到位传感器与机身的表面固定连接,所述工件定位气缸与机身的表面固定连接,所述机身的表面固定连接有按钮盒,所述机身的内壁固定连接有抓料传感器,所述机身的表面固定连接有中间工件传感器。
3、优选的,所述机身的表面卡接有侧挡板,所述机身的表面固定连接有拍照传感器,所述机身的内壁固定连接有视觉拍照相机,所述机身位于拍照传感器的一侧固定连接有进料侧阻挡气缸,所述机身的内壁固定连接有拍照阻挡气缸,所述机身的内壁固定连接有抬升气缸,所述机身的上表面固定连接有报警灯。设置侧挡板,通过侧挡板可对机身的驱动机构和电气机构进行保护。
4、优选的,所述到位传感器的数量为两个,两个所述到位传感器关于机身呈左右对称设置,所述定位工件气缸的数量为两个,两个所述定位工件气缸关于机身呈左右对称设置。设置到位传感器,通过到位传感器检测工件后可启动工件定位气缸和抬升气缸。
5、优选的,所述拍照传感器的数量为两个,两个所述拍照传感器关于机身呈左右对称设置,所述抬升气缸的驱动端与工件相抵接。设置拍照传感器,通过拍照传感器检测到工件后,可启动视觉拍照相机进行拍照。
6、优选的,所述中间工件传感器的表面设置有调节装置,所述调节装置包括支撑架,所述支撑架与中间工件传感器的表面固定连接,所述支撑架的表面开设有滑孔,所述支撑架位于滑孔的内壁滑动连接有滑块,滑块的表面开设有引导孔,所述滑块位于引导孔的内壁滑动连接有限位块。设置支撑架,通过支撑架可对滑块的位置进行支撑。
7、优选的,所述限位块的表面固定连接有限位弹簧,所述限位块的表面固定连接有控制块,所述滑块的表面固定连接有定位卡板。设置控制块,通过控制块以便于拨动限位块。
8、优选的,所述中间工件传感器贯穿支撑架设置,所述中间工件传感器的表面开设有调节槽,所述定位卡板与调节槽的内壁相插接,所述支撑架位于滑孔的内壁开设有卡槽,所述限位块贯穿引导孔设置,所述限位块与卡槽的内壁相卡接,所述限位弹簧与引导孔的内壁固定连接。设置限位弹簧,通过限位弹簧可对限位块的位置进行约束。
9、与现有技术相比,本实用新型的优点和积极效果在于:
10、本实用新型中,通过本申请,当打码机打码之后,拍照传感器检测有工件时,进料侧阻挡气缸抬起阻挡,在此之前拍照阻挡气缸抬升阻挡状态,电机停止运行,视觉拍照识别不合格人工处理,合格继续运行,拍照阻挡气缸时收缩不阻挡,电机进行运行,当中间工件传感器检测到有工件时,中间工位阻挡气缸抬升阻挡,电机停止运行(机器人侧工件有无传感器检测有工件时),当机器人侧工件有无传感器检测无工件时,中间工位阻挡气缸收缩不阻挡,电机运行。然后当到位传感器检测到有工件时,一侧工件定位气缸先伸出,另一侧工件定位气缸再伸出,然后侧抬升气缸抬升,抓料传感器检测到有工件之后,机器人手抓取工件,抓取完再检测到无工件时,抬升气缸收缩到原点,以此循环,本申请通过视觉识别,料道转运一体,增加自动化性能和效率,对不合格零件进行人工转序,合格零件自动转下工序,提高转序质量。
技术特征:
1.一种带有定位和检测的物流料道,包括机身(1)、到位传感器(2)和工件定位气缸(3),其特征在于:所述到位传感器(2)与机身(1)的表面固定连接,所述工件定位气缸(3)与机身(1)的表面固定连接,所述机身(1)的表面固定连接有按钮盒(4),所述机身(1)的内壁固定连接有抓料传感器(5),所述机身(1)的表面固定连接有中间工件传感器(6)。
2.根据权利要求1所述的一种带有定位和检测的物流料道,其特征在于:所述机身(1)的表面卡接有侧挡板(7),所述机身(1)的表面固定连接有拍照传感器(8),所述机身(1)的内壁固定连接有视觉拍照相机(9),所述机身(1)位于拍照传感器(8)的一侧固定连接有进料侧阻挡气缸(10),所述机身(1)的内壁固定连接有拍照阻挡气缸(11),所述机身(1)的内壁固定连接有抬升气缸(12),所述机身(1)的上表面固定连接有报警灯(13)。
3.根据权利要求1所述的一种带有定位和检测的物流料道,其特征在于:所述到位传感器(2)的数量为两个,两个所述到位传感器(2)关于机身(1)呈左右对称设置,定位工件气缸的数量为两个,两个定位工件气缸关于机身(1)呈左右对称设置。
4.根据权利要求2所述的一种带有定位和检测的物流料道,其特征在于:所述拍照传感器(8)的数量为两个,两个所述拍照传感器(8)关于机身(1)呈左右对称设置,所述抬升气缸(12)的驱动端与工件相抵接。
5.根据权利要求1所述的一种带有定位和检测的物流料道,其特征在于:所述中间工件传感器(6)的表面设置有调节装置(14),所述调节装置(14)包括支撑架(141),所述支撑架(141)与中间工件传感器(6)的表面固定连接,所述支撑架(141)的表面开设有滑孔,所述支撑架(141)位于滑孔的内壁滑动连接有滑块(142),滑块(142)的表面开设有引导孔,所述滑块(142)位于引导孔的内壁滑动连接有限位块(143)。
6.根据权利要求5所述的一种带有定位和检测的物流料道,其特征在于:所述限位块(143)的表面固定连接有限位弹簧(144),所述限位块(143)的表面固定连接有控制块(145),所述滑块(142)的表面固定连接有定位卡板(146)。
7.根据权利要求6所述的一种带有定位和检测的物流料道,其特征在于:所述中间工件传感器(6)贯穿支撑架(141)设置,所述中间工件传感器(6)的表面开设有调节槽,所述定位卡板(146)与调节槽的内壁相插接,所述支撑架(141)位于滑孔的内壁开设有卡槽,所述限位块(143)贯穿引导孔设置,所述限位块(143)与卡槽的内壁相卡接,所述限位弹簧(144)与引导孔的内壁固定连接。
技术总结
本技术涉及物流料道技术领域,具体为一种带有定位和检测的物流料道,机身、到位传感器和工件定位气缸,到位传感器与机身的表面固定连接,工件定位气缸与机身的表面固定连接,机身的表面固定连接有按钮盒,机身的内壁固定连接有抓料传感器,机身的表面固定连接有中间工件传感器,机身的表面卡接有侧挡板,机身的表面固定连接有拍照传感器,机身的内壁固定连接有视觉拍照相机,机身位于拍照传感器的一侧固定连接有进料侧阻挡气缸,机身的内壁固定连接有拍照阻挡气缸。本技术,本申请通过视觉识别,料道转运一体,增加自动化性能和效率,对不合格零件进行人工转序,合格零件自动转下工序,提高转序质量。
技术研发人员:李志博,宋明安,文广,王伟,董德,马文平
受保护的技术使用者:宁夏巨能机器人股份有限公司
技术研发日:20220614
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!