一种用于垃圾分拣的机械臂的制作方法
1.本实用新型涉及垃圾领域,更具体地说,本实用新型涉及一种用于垃圾分拣的机械臂。
背景技术:
2.垃圾是失去使用价值、无法利用的废弃物品,是物质循环的重要环节。是不被需要或无用的固体、流体物质。在人口密集的大城市,垃圾处理是一个令人头痛的问题。常见的做法是收集后送往堆填区进行填埋处理,或是用焚化炉焚化。但两者均会制造环境保护的问题,而终止过度消费可进一步减轻堆填区饱和程度。堆填区中的垃圾处理不但会污染地下水和发出臭味,而且很多城市可供堆填的面积已越来越少。焚化则无可避免会产生有毒气体,危害生物体。多数的城市都在研究减少垃圾产生的方法,和鼓励资源回收,大多数垃圾需要进行分拣处理,因此需要用到机械臂。
3.经检索,现有专利(公开号:cn207534817u)公开了一种机械臂气动锁紧装置和机械臂。本实用新型包括设置在机械臂立柱和机械节臂连接处的主轴刹车盘;以及设置在机械节臂上,与所述主轴刹车盘相对应设置的机械臂刹车组件;当机械臂不工作时,机械臂刹车组件与主轴刹车盘相配合,限制机械臂因惯性转动;当机械臂工作时,机械臂刹车组件与主轴刹车盘相分离,不影响机械臂工作。采用上述设计,当机械臂突然停电等突发状况时,能够通过机械臂刹车组件进行制动,相当方便。发明人在实现本实用新型的过程中发现现有技术存在如下问题:现有的用于垃圾分拣的机械臂在对垃圾进行分拣时,因垃圾的形状千奇百怪,在机械爪对垃圾进行夹取时容易会意外脱落,进而导致需要一直重新夹取,较为浪费时间;
4.因此,针对上述问题提出一种用于垃圾分拣的机械臂。
技术实现要素:
5.为了克服现有技术的上述缺陷,本实用新型的实施例提供一种用于垃圾分拣的机械臂,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种用于垃圾分拣的机械臂,包括机械臂,所述机械臂一侧设置有调节机构,所述调节机构一侧设置有固定机构,所述固定机构包括连接板、滑槽、滑块、伸缩条、滑轨、滑轮、机械爪、液压杆、液压缸、第一合页、连接杆、第二合页和固定爪,所述调节机构下方设置有连接板,所述连接板下方表面开设有滑槽,所述滑槽内侧配合安装有滑块,所述滑块外壁一侧螺钉连接有伸缩条,所述伸缩条外壁表面开设有滑轨,所述滑轨内侧配合安装有滑轮,所述滑轮外壁一侧螺钉连接有机械爪,所述机械爪一侧焊接有液压杆,所述液压杆一侧设置有液压缸,所述机械爪一侧螺钉连接有第一合页,所述第一合页一侧设置有连接杆,所述连接板一侧设置有第二合页,所述第二合页一侧螺钉连接有固定爪。
7.进一步的,所述调节机构包括调节环、电动推杆、支撑板、转轴、旋转块、电动伸缩
套杆、螺纹轴和连接块,所述机械臂外壁一侧设置有调节环,所述调节环一侧焊接有电动推杆,所述电动推杆上方设置有支撑板,在机械臂对垃圾进行分拣时,通过设置有电动推杆,在电动推杆的作用下,可以带动支撑板进行调节。
8.进一步的,所述支撑板下方设置有转轴,所述转轴与支撑板平行分布,在机械臂对垃圾进行分拣时,通过设置有转轴,在转轴的作用下,可以带动支撑板进行角度的调节。
9.进一步的,所述支撑板上方设置有旋转块,所述旋转块与支撑板平行分布,在机械臂对垃圾进行分拣时,通过设置有旋转块,在旋转块的作用下,可以对电动伸缩套杆进行旋转,进而对垃圾进行分拣调节。
10.进一步的,所述旋转块上方设置有电动伸缩套杆,所述电动伸缩套杆一侧设置有螺纹轴,所述螺纹轴下方螺钉连接有连接块,在机械臂对垃圾进行分拣时,通过设置有电动伸缩套杆,在电动伸缩套杆的作用下,可以带动连接块进行移动,进而对不同位置的垃圾进行分拣。
11.进一步的,所述连接板通过滑槽与滑块构成滑动结构,且连接板与滑块平行分布,在机械臂对垃圾进行分拣时,通过设置有滑槽与滑块,在滑槽与滑块的相互作用下,可以对伸缩条的位置进行移动。
12.进一步的,所述伸缩条通过滑轨与滑轮构成滑动结构,且伸缩条与滑轮平行分布,在机械臂对垃圾进行分拣时,通过设置有滑轨与滑轮,在滑轨与滑轮的作用下,可以对机械爪的长度进行调节。
13.进一步的,所述机械爪通过液压杆与液压缸构成伸缩结构,且机械爪与液压缸平行分布,在机械臂对垃圾进行分拣时,通过设置有液压杆与液压缸,在液压杆与液压缸的作用下,可以带动机械爪进行调节。
14.进一步的,所述机械爪通过第一合页与连接杆构成旋转结构,且第一合页以连接杆的中轴线对称设置,在机械臂对垃圾进行分拣时,通过设置有第一合页,在第一合页的作用下,可以对机械爪的角度进行调节,进而对垃圾进行二次固定防脱落。
15.进一步的,所述固定爪通过第二合页与连接板构成旋转结构,且第二合页以连接板的中轴线对称设置,在机械臂对垃圾进行分拣时,通过设置有第二合页与固定爪,在第二合页的作用下,可以带动固定爪对垃圾进行分拣。
16.本实用新型的技术效果和优点:
17.与现有技术相比,通过固定机构的设置,在机械臂对垃圾进行分拣时,可以先将液压缸的开关打开,在液压杆与液压缸的相互作用下,利用液压缸带动液压杆进行移动,进而带动机械爪进行移动,同时机械爪会在第一合页的作用下进行旋转,便于对不同形状体积的垃圾进行固定,避免在分拣时会有意外脱落的情况发生,且机械爪旋转的同时,机械爪上方的伸缩条会在滑槽与滑块的作用下,顺着滑块进行移动,对机械爪进行限位移动。
附图说明
18.图1为本实用新型正视剖视结构示意图;
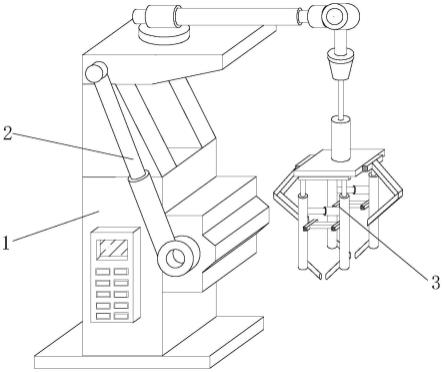
19.图2为本实用新型固定机构结构示意图;
20.图3为本实用新型调节机构结构示意图;
21.图4为本实用新型滑轨与滑轮相互配合结构示意图;
22.图5为图2中a处放大结构示意图。
23.附图标记为:1、机械臂;2、调节机构;201、调节环;202、电动推杆;203、支撑板;204、转轴;205、旋转块;206、电动伸缩套杆;207、螺纹轴;208、连接块;3、固定机构;301、连接板;302、滑槽;303、滑块;304、伸缩条;305、滑轨;306、滑轮;307、机械爪;308、液压杆;309、液压缸;310、第一合页;311、连接杆;312、第二合页;313、固定爪。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.实施例一
26.如附图1-图5所示的一种用于垃圾分拣的机械臂,包括机械臂1,机械臂1一侧设置有调节机构2,调节机构2一侧设置有固定机构3,固定机构3包括连接板301、滑槽302、滑块303、伸缩条304、滑轨305、滑轮306、机械爪307、液压杆308、液压缸309、第一合页310、连接杆311、第二合页312和固定爪313,调节机构2下方设置有连接板301,连接板301下方表面开设有滑槽302,滑槽302内侧配合安装有滑块303,滑块303外壁一侧螺钉连接有伸缩条304,伸缩条304外壁表面开设有滑轨305,滑轨305内侧配合安装有滑轮306,滑轮306外壁一侧螺钉连接有机械爪307,机械爪307一侧焊接有液压杆308,液压杆308一侧设置有液压缸309,机械爪307一侧螺钉连接有第一合页310,第一合页310一侧设置有连接杆311,连接板301一侧设置有第二合页312,第二合页312一侧螺钉连接有固定爪313。
27.本实施例,调节机构2包括调节环201、电动推杆202、支撑板203、转轴204、旋转块205、电动伸缩套杆206、螺纹轴207和连接块208,机械臂1外壁一侧设置有调节环201,调节环201一侧焊接有电动推杆202,电动推杆202上方设置有支撑板203,在机械臂1对垃圾进行分拣时,通过设置有电动推杆202,可以将电动推杆202的开关打开,在电动推杆202的作用下,利用电动推杆202可以带动支撑板203进行调节。
28.本实施例,支撑板203下方设置有转轴204,转轴204与支撑板203平行分布,在机械臂1对垃圾进行分拣时,通过设置有转轴204,在转轴204的作用下,可以利用转轴204带动支撑板203进行角度的调节。
29.本实施例,支撑板203上方设置有旋转块205,旋转块205与支撑板203平行分布,在机械臂1对垃圾进行分拣时,通过设置有旋转块205,可以先转动旋转块205,在旋转块205的作用下,可以对电动伸缩套杆206进行旋转,进而对垃圾进行分拣调节。
30.本实施例,旋转块205上方设置有电动伸缩套杆206,电动伸缩套杆206一侧设置有螺纹轴207,螺纹轴207下方螺钉连接有连接块208,在机械臂1对垃圾进行分拣时,通过设置有电动伸缩套杆206,将电动伸缩套杆206的开关打开,在电动伸缩套杆206的作用下,可以带动连接块208进行移动,进而对不同位置的垃圾进行分拣。
31.本实施例,连接板301通过滑槽302与滑块303构成滑动结构,且连接板301与滑块303平行分布,在机械臂1对垃圾进行分拣时,通过设置有滑槽302与滑块303,可以拉动伸缩条304,在滑槽302与滑块303的相互作用下,可以利用滑块303对伸缩条304的位置进行移
动。
32.本实施例,伸缩条304通过滑轨305与滑轮306构成滑动结构,且伸缩条304与滑轮306平行分布,在机械臂1对垃圾进行分拣时,通过设置有滑轨305与滑轮306,在滑轨305与滑轮306的作用下,可以对机械爪307的长度进行调节。
33.本实施例,机械爪307通过液压杆308与液压缸309构成伸缩结构,且机械爪307与液压缸309平行分布,在机械臂1对垃圾进行分拣时,通过设置有液压杆308与液压缸309,将液压缸309的开关打开,在液压杆308与液压缸309的作用下,液压缸309可以带动机械爪307进行调节。
34.本实施例,机械爪307通过第一合页310与连接杆311构成旋转结构,且第一合页310以连接杆311的中轴线对称设置,在机械臂1对垃圾进行分拣时,通过设置有第一合页310,在第一合页310的作用下,可以对机械爪307的角度进行调节,进而对垃圾进行二次固定防脱落。
35.本实施例,固定爪313通过第二合页312与连接板301构成旋转结构,且第二合页312以连接板301的中轴线对称设置,在机械臂1对垃圾进行分拣时,通过设置有第二合页312与固定爪313,在第二合页312的作用下,可以带动固定爪313对垃圾进行分拣。
36.该文中出现的电器元件均与外界的主控器及220v市电电连接,并且主控器可为计算机等起到控制的常规已知设备。
37.本实用新型的工作过程如下:
38.在机械臂1对垃圾进行分拣时,首先可以接通外部电源,再将液压缸309的开关打开,液压缸309可以带动机械爪307进行调节,同时,机械爪307会在第一合页310的作用下进行旋转,进而对不同体积外形的垃圾进行二次固定,且机械爪307上端会在滑槽302与滑块303的作用下进行移动,对机械爪307进行限位移动,然后把电动推杆202的开关打开,利用电动推杆202可以带动支撑板203进行调节,同时转轴204带动支撑板203进行角度的调节,其次转动旋转块205,再把电动伸缩套杆206的开关打开,对机械爪307的位置进行调节,对不同位置的垃圾进行分拣,其中液压缸309的型号为cdm2b25,电动推杆202的型号为tjc-c1-t3-p-p,电动伸缩套杆206的型号为ys-nz100-12a,这样就完成了一种用于垃圾分拣的机械臂的使用过程。
39.最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
40.其次:本实用新型公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本实用新型同一实施例及不同实施例可以相互组合;
41.最后:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1