干选机及干选方法与流程
1.本发明涉及分选设备技术领域,尤其涉及一种干选机及干选方法。
背景技术:
2.传统干选机为保证处理能力需要一定的传送速度,在输送带高转速条件下,物料极易跟随传送装置移动一段距离,无法短距离稳定,因此传送带的长度一般较长,增大了干选设备的体积,与干选机的小型化互相矛盾,因此需要在保证一定的处理能力的基础上和机械强度的基础上,使干选机尽量的小型化。同时湿润物料由于水分的作用,会与输送带表面具备较强作用力,其抛料轨迹随着水分增加会出现偏离预定轨迹的现象,如何降低水分的影响,提高设备对湿润物料的兼容性,也是干选机面临的重要问题。
技术实现要素:
3.本发明的目的在于提供一种干选机及干选方法,在不降低处理能力的基础上,提高对湿润物料的兼容性,同时降低传送装置的长度,使干选机达到小型化的目的,但是不降低干选机的处理能力。
4.为达此目的,本发明采用以下技术方案:干选机,包括:布料系统,所述布料系统包括传送部和稳速装置,所述稳速装置位于所述传送部上靠近物料进口的一端,用以稳定输入的物料的速度;所述传送部包括动力滚筒、抛料滚筒以及二者之间的传送装置,所述动力滚筒靠近物料进口的一端,所述抛料滚筒位于远离动力滚筒的一端,且所述抛料滚筒的外径小于等于所述动力滚筒的外径;所述稳速装置为刷辊组件,所述刷辊组件包括刷辊,所述刷辊设置于所述传送装置的上方,所述刷辊的旋转方向与所述传送装置的输送方向相同;识别系统,用以识别传送装置输送的物料种类;分选系统,所述分选系统包括阀箱,所述阀箱设置于所述传送装置的末端,用以将识别系统识别后的物料进行分离。
5.作为优选,所述分选系统内设有图像识别装置,用于监控阀箱抛出物料的轨迹。
6.作为优选,所述阀箱为高速电磁阀箱,所述阀箱具有多个喷气嘴,还具有进气孔,所述进气孔与喷气嘴位于阀箱的箱体的相对侧。
7.作为优选,还具有分选室,所述分选系统具有弧形板,所述弧形板设置于分选室顶部,所述弧形板与所述阀箱的喷气嘴相对;所述分选室内还具有沿所述分选室高度方向设置的挡帘;所述分选室的侧壁具有橡胶垫层。
8.作为优选,还包括清扫装置,所述清扫装置具有清扫机构,所述清扫机构设置于传送装置的下方;风干机构,所述风干机构设置于所述传送装置的下方;所述清扫机构、风干机构沿所述传送装置运行的方向依次设置。
9.作为优选,还包括张紧装置,所述张紧装置包括张紧滚筒,所述张紧滚筒转接有滑块,所述滑块滑动连接于背板上,以使所述滑块能带动所述张紧滚筒滑动以拉伸和放松传送装置。
10.作为优选,还具有测速机构,所述测速机构包括测速轮,所述测速轮与传送部中的动力滚筒一侧的传送装置相切,所述测速机构还包括测速弹簧,所述测速弹簧的一端连接于所述测速轮上,所述测速弹簧的另一端固定于干选机的壳体上。
11.一种干选方法,利用上所述的干选机,步骤如下:对物料进行分选,物料进入传送装置进行传送;通过稳速装置控制物料的速度;识别系统对物料进行图像采集并进行识别;根据识别系统的识别结果,阀箱分选需要的物料。
12.作为优选,根据所述物料通过所述射线识别装置时的投影面积与阀箱分选时的抛射轨迹对所述稳速装置进行监控,观察所述物料在分选室的运动轨迹,若出现物料轨迹异常,发出警报,并根据物料经过射线识别装置时的投影面积再次进行判断;若s3*k1》s1,且s3*k2《s2;则稳速装置状态良好;否则发出警报,并可根据设置自动停机,其中设置所述物料稳定时经过所述识别系统时的平均投影面积的波动区间[s1,s2],所述物料稳定时经过所述识别系统时实时的统计投影面积的平均投影面积为s3,k1、k2为0-2之间的常数。
[0013]
本发明的有益效果:通过抛料滚筒的设置使抛料的精度提升,对颗粒水分具备更强的兼容性。而通过稳速装置以使物料快速稳定至与传送装置相同的速度,减少物料在传送装置上稳定的距离,减少了传送装置的长度有效降低了干选机的长度,使干选机小型化。
附图说明
[0014]
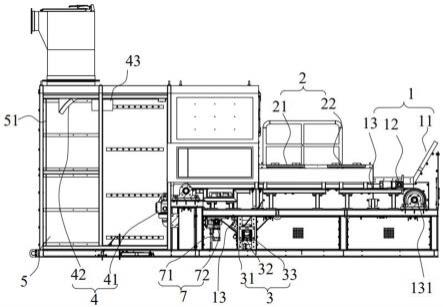
图1是本发明干选机的结构示意图;图2是本发明干选机的布料系统的结构示意图;图3是本发明干选机的稳速装置的示意图;图4是本发明干选机的清扫装置整体结构示意图;图5是本发明干选机的清扫装置的示意图;图6是现有技术中皮带的清扫装置的示意图图7是本发明干选机的张紧装置的示意图;图8是本发明干选机的张紧装置中拉杆的示意图;图9是本发明干选机的阀箱的示意图;图10是本发明干选机的测速机构的示意图;图11是本发明干选方法的流程图;图12是本发明干选机分选时物料在分选时的轨迹约束范围图。
[0015]
图中:1-布料系统;11-进料滑板;12-稳速装置;121-刷辊;122-固定板;123-刷辊侧板;
124-安装柱;125-安装块;126-稳速弹簧;13-传送部;131-动力滚筒;132-抛料滚筒;133-传送装置;2-识别系统;21-射线识别装置;22-视觉识别装置;3-张紧装置;30-背板;31-张紧弹簧;32-拉杆;33-滑块;34-张紧侧板;35-导柱;36-限位件;37-张紧滚筒;38-张紧安装板;4-分选系统;41-阀箱;411-喷气嘴;412-进气孔;42-弧形板;43-图像识别装置;5-分选室;51-挡帘;6-测速机构;61-测速轮;62-测速弹簧;7-清扫装置;71-驱动部;72-清扫机构;73-风干机构;731-出风口。
具体实施方式
[0016]
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
[0017]
在本发明的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0018]
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0019]
在本实施例的描述中,术语“上”、“下”、“右”、等方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
[0020]
如图1至图10所示,本实施例提供一种干选机,包括布料系统1,该布料系统1包括传送部13和稳速装置12,稳速装置12位于传送部13上靠近物料进口的一端,用以稳定输入的物料的速度;传送部13包括动力滚筒131、抛料滚筒132以及二者之间的传送装置133,动力滚筒131靠近物料进口的一端,抛料滚筒132位于远离动力滚筒131的一端,且抛料滚筒的外径小于等于动力滚筒的外径;稳速装置12为刷辊组件,刷辊组件包括刷辊121,刷辊121设置于传送装置133的上方,刷辊121的旋转方向与传送装置133的旋转方向相反;还包括识别系统2,用以识别传送装置133输送的物料种类;还包括分选系统4,该分选系统4包括阀箱41,阀箱41设置于传送装置133的末端,用以将识别系统2识别后的物料进行分离。
[0021]
通过稳速装置12以使物料快速加速至与传送装置133相同的速度,减少物料在传送装置133上稳定的距离,减少了传送装置133的长度,有效降低了干选机的长度,使干选机小型化。
[0022]
下面详细介绍本实施例,如图1和图2所示,一种干选机,包括布料系统1,布料系统1包括进料滑板11,进料滑板11与传送部13连接,其中传送部13包括动力滚筒131、抛料滚筒
132以及二者之间的传送装置133,动力滚筒131靠近物料进口的一端,抛料滚筒132位于远离动力滚筒131的一端;且抛料滚筒的外径小于等于动力滚筒的外径。需要说明的是,本实施例所要解决的技术问题是湿润的小颗粒物料的分选分离,当湿润物料在进入带传送装置133时,通过抛料滚筒132的能够将物料抛出,降低转弯半径,保证离心力大于颗粒的重力加上湿润引起的颗粒与皮带的吸附力,本实施例中设置抛料半径(抛料半径指抛料滚筒的半径与传送装置厚度和)小于等于45mm,支撑半径由动力滚筒131的半径和传送装置133的皮带厚度组成,动力滚筒半径越小,其强度越低,为满足一定的支撑强度和抛料半径,本实施例中采用的传送装置133为薄型传送带,可以有效降低抛料半径,以降低干选机的体积。而薄型传送带的受力(主要是张力)降低,不适合较长的传送距离,也符合减少了传送装置133的长度的需求, 减少物料在传送时所需要的传送距离,避免短距离传送使传统物料抛不起来的弊端。同时也克服了厚传送带的折弯半径较大,无法与较小半径的抛料滚筒配合的技术问题。
[0023]
传送装置133上具有稳定物料速度的稳速装置12,稳速装置12为刷辊组件,刷辊组件包括刷辊121,刷辊121设置于传送装置133的上方,刷辊121的旋转方向与传送装置133的旋转方向相反,需要说明的是本实施例中的刷辊组件连接有提供动力的动力源,为其提供转动动力。需要说明的是,本实施例中采用的刷辊121外圈的速度与传送装置133的传送速度相同,本实施例中刷辊121连接有外部的动力源以进行驱动,通过采用刷辊121与传送装置133的互相挤压以增加物料位于传送装置133上的压力,根据动摩擦力f=uf(其中f为动摩擦力、u为摩擦系数、f为压力),而动摩擦力影响物料的加速度,使物料快速加速至与传送装置133相同的速度,减少物料在传送装置133上稳定的距离,从而降低传送装置133的长度进而有效减小干选机的长度尺寸。
[0024]
如图3所示,刷辊组件包括固定板122,固定板122上沿传送装置133输送方向设有刷辊侧板123,刷辊侧板123上设有垂直于刷辊侧板123的安装柱124,安装块125滑接于安装柱124上,安装块125与刷辊侧板123之间设有稳速弹簧126,安装块125上转接有刷辊121,刷辊121通过固定板122设置于传送装置133的上方。采用稳速弹簧126与滑接相结合的方式,使刷辊121能够在遇到比预先设定的的粒径大的物料时,能够使其顺利通过刷辊121,以免堵塞传送装置133。
[0025]
如图1所示,干选机还包括识别系统2,该识别系统2包括射线识别装置21和视觉识别装置22,用以识别传送装置133输送的物料种类;本实施例中,射线识别装置21为x射线识别装置21,视觉识别装置22采用的是工业相机, x射线识别装置21具有x光射源和线阵接收组件。x光射源发射x射线照射物料,线阵接收组件接收穿透物料后的射线,根据射线衰减程度的差异精准识别目标矿物和脉石,针对不同矿物辅以不同波段的工业相机,提高识别的准确性。
[0026]
如图1和图9所示,干选机还具有分选系统4,分选系统4包括阀箱41,阀箱41设置于传送装置133的末端,用以将识别系统2识别后的物料进行筛分。本实施例中,阀箱41为高速电磁阀箱,阀箱41具有多个喷气嘴411,阀箱41还具有进气孔412,进气孔412与喷气嘴411位于阀箱41的箱体的相对侧。本实施例中,进气孔412设置在阀箱41底部,使干选机在宽度方向上尺寸大幅度减小,进一步降低干选机的尺寸,进一步降低其占地面积。
[0027]
干选机还设有分选室5,分选系统4具有弧形板42,弧形板42设置于分选室5顶部,
弧形板42与阀箱41的喷气嘴411相对;需要说明的是,其中阀箱41对识别系统2识别后认为可以选用的物料进行喷气打击,而经过识别系统2识别的杂质物料则不进行喷气打击,杂质物料落入到设置于分选室5底部的杂质物料收集装置内,经喷气嘴411打的的物料到达弧形板42,弧形板42使物料碰撞后呈现一定的反射角,使物料无法按入射角的方向弹回,反弹后的物料可自由摆动形成一次缓冲。分选室5内还具有沿分选室5高度方向设置的挡帘51;本实施例中,挡帘51的尺寸为宽40mm,厚4mm,以形成二次缓冲,在挡帘51的阻挡作用下,阀箱41击打力度小的物料在挡帘51的缓冲阻挡下直接进入预先设定的收集槽中(收集槽未标出)。分选室5的侧壁具有橡胶垫层,阀箱41击打力度较大的物料穿过挡帘51撞击分选室5的橡胶垫层形成三次缓冲,在橡胶垫层回弹后再次由挡帘51阻挡,进一步降低动能,使得物料进入预先设定的收集槽中。分选室5内采用多重缓冲结构,缩短了分选室5的长度进而进一步缩小了分选室5的体积,而在较短的缓冲距离下,充分降低物料因反弹造成的错配,保持高效的分选。分选室5中还可以增加工业相机对抛出物料的轨迹进行追踪。
[0028]
其中,分选系统4还包括图像识别装置43,用于监控阀箱41抛出物料的轨迹,本实施例中图像识别装置43为预设于分选室5内的工业相机,用以对经过阀箱抛料后的物料轨迹进行监控,从而对稳速装置12进行监控,以实时了解稳速装置12工作状态以进行及时维修和更换。
[0029]
如图1、图4、图5所示,干选机还包括清扫装置7,该清扫装置7包括清扫机构72,本实施例中清扫机构72为设置于传送装置133下方的清扫辊,清扫辊沿传送装置133的宽度方向设置用以清扫传送装置133上的残留物。本实施例中,清扫机构72安置在下方不会对传送装置133上方的输送和分选进行干扰。进一步地,清扫辊的外周壁上设有毛刷,能够对传送装置133进行深度的清洁,将残留物清扫干净。
[0030]
需要说明的是,现有技术中的干选机(智能光电分选机),皮带的清扫装置为设置在抛料滚筒处的刮刀清扫器, 如图6所示。通过刮刀清扫器将附着在皮带上得物料清理下来;但是本实施例,为了降低抛料半径采用薄型皮带,其耐磨性降低,现有技术的刮刀清扫器反复摩擦皮带,会导致皮带寿命降低,不适合薄型皮带。
[0031]
需要说明的是,本实施例中的毛刷采用的是硬毛刷。进一步地,清扫辊的长度大于传送装置133的宽度,以能够使清扫辊覆盖传送装置133的全部宽度面,避免传送装置133遗留有未清扫的死角。进一步地,清扫机构72还具有驱动部71,需要说明的是,本实施例中驱动部71为伺服电机,以为清扫辊提供转动动力,驱动部71连接于清扫辊,用以带动清扫辊转动,加以清洁传送装置133的表面;同时也可以通过伺服电机调整清扫辊的旋转速度以用不同的速度适应不同的残留异物,使清扫的更加的干净彻底。需要说明的是,本实施例中,清扫辊的旋转方向与传送装置133的旋转方向相同,清扫面形成逆向运动以更好的对传送装置133进行清洁。
[0032]
清扫装置7还包括风干机构73,风干机构73为传送装置133的下方的风管;清扫机构72、风干机构73沿传送装置133运行的方向依次设置,以能够将清扫机构72清扫完成的传送装置133进行烘干,降低传送装置133上的水分和杂质,以降低传送装置133的吸附力。风管上设有若干出风口731,出风口731面向传送装置133。进一步地,出风口731沿传送装置133的宽度方向上均匀设置,以能够使出风口731覆盖整个传送装置133的宽度方向。进一步地,出风口731上连通有高速喷嘴,一方面能够使传送装置133中的水分快速的清除,同时也
能够对清扫辊清除后的传送装置133进行二次的清扫,将清扫辊未清除的残留异物由高速喷嘴喷出的气体完成清除。应当理解的是,本实施例中风管连接外部的高压输气装置从而通过高速喷嘴喷出高速气体。
[0033]
如图1、图7、图8所示,干选机还包括张紧装置3,张紧装置3包括背板30以及设置于背板30上的张紧侧板34,张紧侧板34上设有导柱35;进一步地,张紧侧板34具有两个,并位于背板30的相对两侧,导柱35夹设于相对的张紧侧板34之间,以使导柱35固定的更加稳固。本实施例中,导柱35可拆卸的连接于张紧侧板34上,具体的导柱35的两端部分别穿设于相对的张紧侧板34,导柱35端部设有螺纹,导柱35通过螺母与张紧侧板34紧固。导柱35上滑接有滑块33,张紧装置3还包括拉杆32,拉杆32的一端穿设于张紧侧板34与滑块33连接,进一步地,拉杆32为螺柱,拉杆32与滑块33之间为螺接,以能够通过旋转螺柱的方式使滑块33沿导柱35滑动。滑块33位于侧板的相对侧处设有限位件36;限位件36与拉杆32的另一端连接,需要说明的是,本实施例中采用的是固定螺母进行限位操作,以更加方便的进行限位,通过旋转固定螺母即能够带动滑块33进行滑动,方便进行操作;另外其他实施例中限位件36也可采用可拆卸的螺母进行螺接。采用螺接方式一方面方便对螺柱的长度进行控制,即控制滑块33的滑动距离,另外也方便对螺柱进行维修和更换;本实施例中,张紧侧板34与滑块33之间还具有张紧弹簧31以起到缓冲作用,避免限位件36与螺柱之间或者螺柱与滑块33之间振动脱落。张紧装置3的滑块33转接有张紧滚筒37,张紧滚筒37的长度方向与导柱35的长度方向互相垂直。使滑块33能带动张紧滚筒37沿导柱35滑动以张紧和放松传送装置133。还包括张紧安装板38,张紧装置3通过张紧安装板38与背板30安装固定到干选机的机体上。需要说明的是,本实施例中的张紧装置3设置两组,张紧滚筒37两端安装在两组张紧装置3的滑块33之间;调整其中一组的张紧装置3可以解决由于传送装置133左右不一样长导致的传送装置133跑偏的情况。如:当传送装置133运行中发生向右侧偏移的情况,说明传送装置133左松右紧,需要将张紧滚筒37的右侧上移,这就需要松动右侧张紧装置3的拉杆32,使张紧滚筒37上移;传送装置133向左跑偏侧相反操作。
[0034]
如图2和图10所示,干选机还具有测速机构6,测速机构6包括测速轮61,测速轮61与动力滚筒131上的传送装置133相切,测速轮61与动力滚筒131上的传送装置133紧密贴合,保证测速轮61与传送装置133同步转动,精准测量传送装置133的转速。测速机构6还包括测速弹簧62,测速弹簧62的一端连接于测速轮61的安装支架上,测速弹簧62的另一端固定于干选机的壳体上。测速弹簧62起到缓冲的作用,防止传送装置133震动损坏测速轮61。
[0035]
如图11和图12所示,本实施例还提供一种干选方法,利用如上的干选机,包括如下步骤,s1.物料可经振动筛进行初步的分选,使物料通过进料滑板11落到传送装置133上进行传送;s2.通过稳速装置12中的刷辊组件使物料快速达到与传送装置133相同的速度;s3.射线识别装置21和视觉识别装置22对物料进行图像采集并进行识别;s4.根据射线识别装置21和视觉识别装置22的识别结果,阀箱41将需要分选出的物料打出,打出后的物料在分选室5内经过弧形板42、挡帘51、橡胶垫后进入到收集槽中。
[0036]
在进行s1-s4中均可根据物料通过射线识别装置21的投影面积与分选时图像识别装置43监测的物料的轨迹对稳速装置12进行监控以及时发现稳速装置12中的刷辊121是否
出现故障以进行检修,具体的,观察物料由分选室5的图像识别装置43监测的物料的运动轨迹,当稳速装置12中的刷辊121正常,则物料经过分选室5的运动轨迹由图像识别装置43监测后会形成约束范围,即如图12所示的约束范围;若有物料出现在约束范围的下方,则表明物料可能未按照预期实现物料与进入传送装置133同步,发出二级报警;并根据物料经过射线识别装置21时的投影面积再次进行判断;设置物料经过射线识别装置21的平均投影面积的波动区间[s1,s2],物料稳定时经过射线识别装置21时的投影面积实时的统计平均投影面积为s3,设置0-2之间的常数k1、k2,若s3*k1》s1,且s3*k2《s2;则稳速装置12状态良好;否则,发出一级警报,并可根据设置自动停机并检修稳速装置12;从而根据物料以判断稳速装置12经过长期的工作是否发生故障需要进行维修或者清理。
[0037]
显然,本发明的上述实施例仅仅是为了清楚说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1