基于短期密集级联网络的焦炉交换考克快速巡检方法与流程
本发明涉及焦炉交换考克工作状态检测方法,更具体地说是涉及一种基于短期密集级联网络的焦炉交换考克快速巡检方法,属于焦化焦炉。
背景技术:
1、焦炉中的交换考克是一种可以调节煤气流量从而控制焦炉的加热过程,如控制温度以达到最佳的炼焦效果。但是煤气具有腐蚀性,再加上工作环境高温高湿影响,使得交换考克生锈导致卡死;焦炉煤气中的焦油等杂质也会越来越多的附着在旋塞芯子上,很容易导致交换拉条或搬杆断裂事故。还有因拉条脱落,或者位置错误,从而影响煤气和废气的交换,导致焦炉温度控制不稳定,最终导致焦炉无法加热或者持续高温。
2、针对焦炉交换考克工作状态检测这个问题,现有的产品主要是通过在焦炉交换考克安装多个传感器的方式进行检测。如安装测温传感器,获取温度的异常来检测整个加热设备的异常。还有些产品是通过检测交换考克的压力来判断考克设备的异常。
3、发明人检索发现,cn213579834u:一种焦炉交换异常智能监测系统,是通过多组温度检测模块去采集焦炉的开闭器温度,数据采集模块获取温度检测模块,通过控制器传输给工控机,在显示器上展示给工作人员。这种装置虽然能检测到整个加热设备的异常,但是无法检测到具体哪个设别的异常,还需要工人到现场对所有设备进行二次检查,响应慢且耗时耗力。cn217032835u:一种适用于焦炉交换考克的报警装置,是通过采集各个考克的压力来检测考克设备的异常,采用电子拉力表链接交换考克搬杆,通过搬杆定时来回交换转动,设置固定参考压力值,通过对比参考值,来判断是否异常,异常值超过3分钟进行报警。虽然此装置能发现某个交换考克的异常,但是该检测方式只是简单的比较压力值,没有考虑其他因素的影响,比如环境的变化、测量的误差,设备生锈导致拉力的增大等,检测精度相对较低,可能会导致误报或者漏报,没有有效的减低节省劳动力。
4、另外,现场交换考克一般为两个一组,组和组之间的考克有一定的距离,通过调节相机的倍率等参数,可以保证在相机的视野里只有一组考克设备存在。但是交换考克状态变化大,基于传统的sift、surt等特征点匹配效果无法提取到稳定的特征对,如果将这个作为偏移量进行补偿,会造成误识别的情况。我公司有利用基于深度特征的质量感知算法qatm(quality-aware template matching)进行特征匹配,来得到准确的匹配结果,虽然该算法匹配效果好,但是对有硬件资源有一定的要求,因为检测图片上只有一组交换考克设备,进行模板匹配没有实际意义,添加模板匹配还增加了耗时。
5、因此,如何实现焦炉现场不停车巡检、取缔偏移量补偿操作以提高巡检响应效率、减少劳动力是目前需要解决的技术难题。
技术实现思路
1、本技术通过提供一种基于短期密集级联网络的焦炉交换考克快速巡检方法,解决了现有技术中巡检精准度低、耗时耗力、响应慢的问题,实现了现场不停车高精准巡检的技术效果。
2、本发明的技术方案为:基于短期密集级联网络的焦炉交换考克快速巡检方法,其特征在于,包括不停车巡检步骤和交换考克工作状态检测步骤,所述不停车巡检步骤包括:
3、s1.1,构建机器人巡检地图,配置机器人运动软限位起点和终点;
4、s1.2,控制机器人移动到合适的位置,调整云台角度,找到交换考克最佳检测拍照位置,保存待检测设备在可见光相机的视野中央位置,采集巡检目标模板图,记录云台角度和可见光倍率焦距信息,并记录该位置云台距离被测设备的距离;
5、s1.3,配置算法识别规则,将配置好的巡检数据点数据包通过web导入机器人;
6、s1.4,机器人通过巡检任务和地图进行路径规划及巡检;
7、s1.5,在巡检过程中,机器人平台根据交换考克状态识别结果,结合联动信号规则,实时显示巡检结果和告警信息,在巡检完检测任务之后,机器人平台会根据上述信息自动生成报表,供焦炉工作人员查看;
8、所述交换考克工作状态检测步骤包括:
9、s2.1,利用短期密集级联网络stdc分割出图像中交换考克关键部件;
10、s2.2,对分割的交换考克进行角度判断。
11、作为优选,所述s1.4机器人通过巡检任务和地图进行路径规划及进行巡检步骤包括:
12、s1.4.1)根据路径规划的结果,机器人启动到软限位的终点或起点;
13、s1.4.2)机器人移动至巡检点a,并进行相机倍率聚焦的调整;
14、s1.4.3)控制云台角度,让可见光相机时刻追踪巡检点上需要检测的设备;
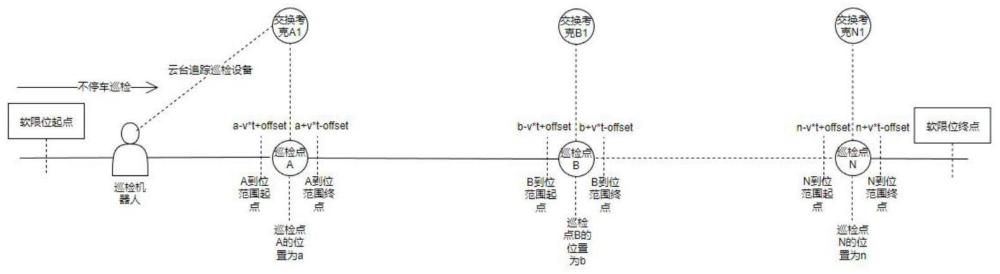
15、s1.4.4)机器人进入到巡检点a到位范围后,则机器人到达当前巡检点,所述到位范围是根据机器人运行的速度v和机器人从判断到位,到准备拍照之间的最大耗时t计算出的一个距离值s=v*t,例如目标位置为a,则认为[a-s,a+s]是机器人的到位范围。在实际测试过程中,如果发现这个范围不合适,可通过机器人的配置工具来配置一个offset,则机器人的到位范围是[a-s+offset,a+s-offset]。尽量保证机器人正在拍照的时刻,机器人拍照的位置在目标位置上,即使有一点偏差也不影响,因为在这个过程中始终控制着云台追踪着巡检点上需要巡检的设备;
16、s1.4.5)动作组分离:调度并行线程继续执行动作组剩余动作,如拍照、图像识别等;
17、s1.4.6)同时,调度主线程执行下一个动作组;主线程是指负责控制机器人运动、执行任务规划和调度等核心功能的线程。在执行巡检任务时,主线程会根据预先设定好的任务计划,对机器人的运动轨迹、动作组以及相应的动作参数进行规划和调度;
18、s1.4.7)重复执行步骤s1.4.2)~步骤s1.4.6),直到巡检完成。
19、作为优选,所述s2.1步骤包括:
20、2.1.1)利用短期密集级联网络stdc将输入图像分割成多个子区域,对每个子区域进行卷积操作,生成多个特征图;
21、2.1.2)利用短期密集级联网络stdc使用池化操作将所述特征图的维数逐渐缩小,得到更抽象的特征表示;
22、2.1.3)利用短期密集级联网络stdc将所有特征图进行拼接,得到最终的特征表示。
23、作为优选,所述步骤2.1.1包括:
24、首先,短期密集级联网络stdc利用细节聚合模块来生成细节地面实况;
25、然后,利用二进制交叉熵损失和戴斯系数dice损失优化学习细节信息,细节聚合模块将特征图进行上采样后与原始特征图进行拼接,生成细节地面实况;
26、最后,短期密集级联网络stdc采用卷积操作将细节地面实况与特征图进行融合,生成最终的分割结果。
27、作为优选,在所述短期密集级联网络stdc利用细节聚合模块来生成细节地面实况步骤中,
28、首先,采用特征空间调制fsm增强低层特征图来丰富空间信息以保证最终的对齐结果尽可能接近真实标签gt;
29、接着,fam采用可变形卷积dcn来学习高级和低级特征之间的偏移,然后结合偏移量来指导特征对齐的过程。
30、作为优选,所述步骤s1.4.3中云台角度的控制方法位:
31、当前机器人位于a点,a1点为待检测交换考克在可见光视野中央位置,设a1点坐标为x1与机器人坐标x2之间的距离为d1=x2-x1,a1点与被测设备之间的距离为d2;
32、根据三角函数公式,得出:tan(θ)=d2/d1,其中θ表示云台需要转动的角度;
33、将云台运动到角度为90-θ位置以使a1点的检测交换考克在可见光视野中央位置。
34、作为优选,所述s2.2对分割的交换考克进行角度判断方法为:对分割的两个交换考克mask进行提取,通过pca主成分分析分别计算mask的主方向;所述pca主成分分析用于计算特定目标的主方向及计算所述主方向与水平轴之间的夹角θ1和θ2;目标左夹角为θ3,目标右夹角为θ4,β为设置的到位误差;
35、若夹角|θ1-θ3|<β且|θ2-θ3|<β,则搬杆左旋转到位;
36、若夹角|θ1-θ4|<β且|θ2-θ4|<β,则搬杆右旋转到位;
37、若夹角不满足上述条件,或者只分割出一个搬杆,则搬杆未旋转到位,出现异常。
38、作为优选,所述s2.2步骤还包括通过联动信号来判断搬杆位置与期望的目标位置是否一致;所述联动信号为控制交换考克向运动方向的信号,机器人获取到联动信号后,等待时间超过考克的运动时间后,开始执行巡检任务,在巡检过程中,算法程序根据联动信号判断考克的目标位置,以便进行到位判断。
39、本技术提供的技术方案,至少具有如下技术效果或优点:
40、1、本发明实现了不停车巡检的方式进行交换考克的识别,填补了焦炉场景不停车巡检的空白。
41、2、本发明不停车巡检方案,提高了巡检效率和效果。同时,解决了运动中拍照导致图片模糊的问题,通过控制云台运动,弱化了该影响。
42、3、通过使用fam特征对齐模块、边缘检测损失和边界指导损失,优化交换考克状态识别的语义分割效果,再利用pca主成分分析方法,提高了交换考克状态的检测判断能力。
43、4、本发明删除了偏移量补偿匹配过程,极大地缩短了巡检时间。
44、5、本发明采用图像检测装置来检测交换考克的工作状态更好地满足了实际场景下的巡检需求,提高了巡检效率和效果。
- 还没有人留言评论。精彩留言会获得点赞!