能够停用惯性转矩补偿的控制动力总成的发动机转矩的方法与流程
1.本发明的领域涉及一种用于控制机动车辆的动力总成的发动机转矩的控制方法。
背景技术:
2.在车辆加速或减速时,车辆的动力总成的传动链受到阻力转矩的影响,必须补偿阻力转矩以满足驾驶员的期望,尤其是在车辆的牵引机与车轮之间旋转地传输转矩的传输构件的惯性阻力转矩。为此,本身已知的用于控制发动机转矩的控制方法配置成给牵引机的发动机转矩设定值加上一个惯性转矩以补偿传动链的阻力转矩(couple r
é
sistant)。惯性转矩分量(composante de couple inertiel)对应于车轮旋转转速的导数乘以在牵引机与车辆的车轮之间的牵引传动链的惯性矩。
3.例如从现有技术中已知的文献wo2010058470a1描述了一种控制方法,该方法配置成通过惯性转矩校正发动机转矩设定值。此外,对发动机转矩控制的管理在混合动力构造的推进模式转换期间特别精细。为避免在与热力发动机耦合时在传输轴上的冲击,申请人提交了法国专利申请fr2999138a1,其描述了一种控制动力总成的转矩的控制方法,该方法考虑到了对传动链的惯性的修正。
4.更通常地,已经观察到,在具有陡坡的驾驶情况下惯性转矩的补偿可被证实是不符合期望的,在陡坡上在驾驶员要求加速时车辆会失去速度。实际上,当车轮的旋转转速梯度为负时,惯性转矩分量从驾驶员期望的转矩中减去并且更加明显地降低所述车辆的速度。该情况迫使驾驶员致动加速踏板以维持所期望的速度。这导致驾驶员感到在驾驶时动力总成失去动力。该情况会影响驾驶乐趣。
技术实现要素:
5.因此,需要解决上述问题,并提出一种用于控制动力总成的转矩的控制方法,以改善车辆驾驶乐趣和行驶性能。
6.更确切地,本发明涉及一种控制方法,用于控制由机动车辆的动力总成的至少一个车桥施加给车轮的发动机转矩,所述控制方法包括确定要传输给所述车辆的车轮的驾驶员期望转矩设定值以及计算由所述车桥施加的发动机转矩设定值,所述发动机转矩设定值至少根据所述驾驶员期望转矩设定值以及惯性转矩分量来计算,所述惯性转矩分量补偿所述车桥的牵引传动链的惯性阻力转矩。根据本发明,所述控制方法包括当所述惯性转矩分量与所述驾驶员期望转矩设定值的转矩相反时,在计算所述发动机转矩设定值时停用所述惯性转矩分量。
7.根据所述方法,在检测到所述惯性转矩分量的转矩为负且所述驾驶员期望转矩设定值的转矩为正时,所述惯性转矩分量在所述发动机转矩设定值的计算中停用。
8.根据所述方法,在检测到所述惯性转矩分量的转矩为正且所述驾驶员期望转矩设定值的转矩为负时,所述惯性转矩分量在所述发动机转矩设定值的计算中停用。
9.根据一种用于检测所述惯性转矩分量与所述驾驶员期望转矩设定值的转矩相反
的变型,所述方法包括以下步骤:
10.‑
根据所述车桥的车轮的旋转转速梯度以及所述车桥的牵引传动链的惯性矩来连续计算所述惯性转矩分量的转矩,
11.‑
确定所述惯性转矩分量的转矩的符号,
12.‑
比较所述惯性转矩分量的转矩的符号与所述驾驶员期望转矩设定值的转矩的符号,
13.‑
根据所述比较的结果停用所述惯性转矩分量。
14.根据一种用于检测所述惯性转矩分量与所述驾驶员期望转矩设定值的转矩相反的变型,所述方法还包括以下步骤:
15.‑
连续测量所述车桥的车轮的旋转转速,
16.‑
计算所述车桥的车轮的旋转转速梯度,
17.‑
比较所述旋转转速梯度的符号与所述驾驶员期望转矩设定值的转矩的符号,
18.‑
根据所述比较的结果停用所述惯性转矩分量。
19.更确切地,根据所述方法,所述发动机转矩设定值是根据以下关系式计算的:cm=cvc+[k]*cpi,其中cm是所述发动机转矩设定值,cvc是所述驾驶员期望转矩设定值,k是所述惯性转矩分量的应用系数,所述应用系数操控为0与1之间的值,以及cpi是所述惯性转矩分量。
[0020]
本发明还提供了一种控制单元,用于控制由机动车辆的动力总成的至少一个车桥施加给车轮的发动机转矩,所述控制单元包括实施根据上述实施方式中任一项的控制方法的部件。
[0021]
根据一种变型,所述控制单元包括计算所述惯性转矩分量的转矩的计算部件、比较所述惯性转矩分量的转矩的符号与所述驾驶员期望转矩设定值的转矩的符号的比较部件、以及根据来源于所述比较部件的结果在计算所述发动机转矩设定值时停用所述惯性转矩分量的停用部件。
[0022]
根据一种变型,所述控制单元包括计算所述车桥的车轮的旋转转速梯度的计算部件、比较所述旋转转速梯度的符号与所述驾驶员期望转矩设定值的转矩的符号的比较部件、以及根据来源于所述比较部件的结果在计算所述发动机转矩设定值时停用所述惯性转矩分量的停用部件。
[0023]
本发明还提供了一种机动车辆,所述机动车辆包括根据上述实施方式中任一项的控制单元。
[0024]
由于本发明,发动机转矩控制方法通过在惯性转矩分量与驾驶员期望转矩相反时停用所述惯性转矩分量,有利于实现驾驶员期望。
附图说明
[0025]
通过阅读以下包括本发明的作为示意性而非限制性示例给出的实施方式的详细描述和附图,本发明的其它特征和优点将更加清楚,在附图中:
[0026]
‑
图1示意性示出了旨在实施根据本发明的方法的机动车辆混合动力总成;
[0027]
‑
图2示意性示出了用于控制由所述车辆的动力总成的车桥施加的发动机转矩的控制单元;
[0028]
‑
图3是曲线图,示出了造成车辆减速的具有增大的行驶坡度的驾驶情况并且示出了所述动力总成的转矩控制曲线。
具体实施方式
[0029]
本发明涉及一种用于控制由机动车辆的至少一个车桥施加给车轮的发动机转矩的控制方法,所述控制方法能够停用惯性转矩分量,该惯性转矩分量通常被计算用于补偿由车辆的牵引传动链的惯性引起的阻力转矩。
[0030]
图1示出包括混合动力总成的机动车辆1,所述混合动力总成装备有与前车桥机械联接的第一前驱动模块14以及与后车桥机械联接的第二后驱动模块17。第一驱动模块以及第二驱动模块在附图上通过虚线框起。第一驱动模块14包括热力发动机10、将前驱动电机12与热力发动机10联接的离合器装置11、以及变速箱13,所述变速箱的输出轴与前车桥机械联接。前驱动电机12可单独地或补充于热力发动机10向车轮提供发动机转矩。第二驱动模块17包括后驱动电机16,所述后驱动电机通过抓合(crabotage)装置17与后车桥机械联接。根据本发明的控制方法当然适用于其它动力总成技术,例如液压/压缩空气混动式动力总成、全电动式又或单独热动力式动力总成、或包括单个驱动模块的动力总成。
[0031]
图2示出了所述车辆的动力总成的控制单元20,所述控制单元尤其负责控制由所述车辆的一个或两个驱动模块施加的发动机转矩。通常,控制单元20还负责协调所述动力总成的构件以便将所述动力总成的传动链配置在由该架构允许的不同行驶模式中,即在该变型中包括热力行驶模式、全电动行驶模式(通过前电机和/或后电机)、经济的混合动力行驶模式以及运动行驶模式,该运动行驶模式注重驱动机(热力发动机以及电机)的整体性能。所述控制单元是单独的集成电路计算机,但可以设想,操控动力总成的操控功能分布在多个计算机之间,其中包括热力发动机、变速箱、或者电机的计算机。所述操控功能(尤其是负责控制施加给车辆的车桥的发动机转矩的控制方法的功能)的功能性及软件分布绝不限制本发明。可以补充的是,所述控制单元能够是数字或模拟处理电路。
[0032]
更确切地,控制单元20包括确定车辆速度设定值的第一模块21。速度设定值根据所述车辆的加速踏板和制动踏板的位置、又或根据用于自动化操控所述车辆的轨迹的自动化操控功能来确定。根据所述车辆的速度设定值,第二模块22计算代表驾驶员期望(或自动化操控功能)的转矩设定值cvc。
[0033]
此外,本身已知地,所述控制单元包括计算惯性转矩分量cpi的转矩的第三模块23,所述惯性转矩分量的功能是补偿所述车辆在行驶时牵引传动链的惯性阻力转矩。惯性转矩分量cpi是具有转矩值的参数,该转矩值根据所述车辆的牵引传动链的惯性矩以及所述车辆的车轮的转速梯度来连续计算。更确切地,所述惯性转矩分量的转矩等于cpi=j*d(rg)/dt,其中cpi是所述惯性分量的转矩(表示为n.m),j是所述牵引传动链的惯性矩(表示为kg.m2)并且rg是所述车辆的车轮的旋转转速(表示为圈/分钟)。控制单元20能够根据第三模块23确定所述惯性分量的转矩的符号。在所述车辆加速时,所述惯性转矩为正,并且在减速时所述惯性转矩为负。
[0034]
当所述车辆是由混合动力总成驱动时,如图1所示,所述惯性矩取决于当前配置的行驶模式的牵引传动链的转矩传输构件中的每个。因此,可以理解的是,所述牵引传动链的惯性矩能够根据当前的行驶模式取决于后驱动电机16、抓合装置15、热力发动机10、离合器
装置11、前驱动电机12以及变速箱13的惯性转矩。
[0035]
控制单元20还包括第四模块24,所述第四模块计算施加给所述车辆的车轮的发动机转矩设定值cm。该发动机转矩设定值cm的值至少取决于驾驶员期望转矩设定值cvc以及惯性分量cpi。
[0036]
根据本发明,在计算发动机转矩设定值cm时,所述控制单元配置成当惯性转矩分量cpi的转矩与驾驶员期望设定值cvc的转矩相反时,在发动机转矩设定值cm的计算中停用惯性转矩分量cpi。所述控制单元的该有利功能因而能够避免所述惯性转矩分量从驾驶员期望设定值的转矩中减去同时驾驶员控制加速,或者避免所述惯性转矩分量增加至驾驶员期望设定值的转矩同时驾驶员控制减速。
[0037]
更确切地,控制单元20包括比较部件26,所述比较部件比较惯性转矩分量cpi的转矩的符号与驾驶员期望设定值cvc的转矩的符号,并且包括停用部件,所述停用部件根据来源于所述比较部件的结果在由所述第四模块计算发动机转矩设定值cm时停用所述惯性转矩分量。
[0038]
更确切地,发动机转矩设定值cm是根据以下关系式计算的:
[0039]
cm=cvc+[k]*cpi,其中cm是所述发动机转矩设定值,cvc是所述驾驶员期望设定值,k是所述惯性转矩分量的应用系数,cpi是所述惯性转矩分量。
[0040]
注意到,系数k是可由所述控制单元操控并且在值0与1之间的参数,其能够根据驾驶员期望施加惯性补偿。该系数k是根据二维图表来计算的,所述二维图表取决于驾驶员期望(符号为正或负)以及物理惯性转矩分量(符号为正或负)。因此,由于对系数k的操控,所述控制单元能够在驾驶员期望与物理惯性转矩的符号相反时渐进地取消及施加惯性转矩分量。
[0041]
控制单元20还包括第五模块25,所述第五模块的功能是将发动机转矩设定值cm分配给牵引机或分配给动力总成的牵引机以将所述发动机转矩设定值施加给所述车辆的车轮。模块25是操控热力发动机、前驱动电机、后驱动电机的操控模块,或是在与车轮耦合的牵引机之间分配发动机转矩的分配模块。
[0042]
可以设想到,在一种变型中,对惯性转矩分量的停用取决于所述车辆的车轮的旋转转速梯度的符号而不必依靠计算惯性转矩的操作。该变型有利地能够通过只检测所述车轮的旋转转速梯度的符号值来简化所述停用。特别地,该检测模式具有更快的响应时间。
[0043]
为此,所述控制单元包括测量所述车桥的车轮的旋转转速的测量模块、计算所述旋转转速的梯度的计算部件、比较所述旋转转速梯度的符号与所述驾驶员期望设定值的转矩的符号的比较部件、以及根据来源于所述比较部件的结果在计算发动机转矩设定值cm时停用所述惯性转矩分量的停用部件。
[0044]
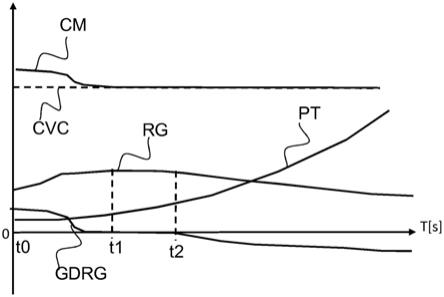
图3示出所述车辆的一种驾驶情况。曲线cm示出施加给所述车辆的车轮的表示为n.m的发动机转矩设定值cm,虚线cvc示出代表驾驶员期望的表示为n.m的转矩设定值,曲线rg示出所述车辆的车轮的表示为圈/分钟的旋转转速,曲线pt示出所述车辆所通行的道路的坡度,并且曲线gdrg示出所述车辆的车轮的转速梯度。横坐标轴示出了时间,且以秒为单位表示。
[0045]
更确切地,根据该驾驶情况,观察到所述车辆通行在坡度增加的道路上并且在整个情况下驾驶员对转矩的期望保持在恒定值。从t0到时刻t1,所述车辆的车轮的旋转转速
rg增大。所述车轮的旋转转速梯度gdrg因此为正,直到在时刻t1达到零值。在该阶段期间,发动机转矩cm等于驾驶员期望设定值的转矩值与所述惯性分量的转矩值之和。
[0046]
在t1之后,由于在坡度增加的同时以恒定速度行驶,所述车轮的旋转转速rg保持恒定值。从时刻t2起,所述车辆开始失去速度。所述车轮的旋转转速rg的值减小并且因此所述转速梯度gdrg的值为负。惯性转矩分量cpi的转矩因而为负,同时驾驶员期望转矩为正。
[0047]
为了减小所述坡度对驾驶员在加速踏板上的作用的影响,由所述控制单元实施的该发动机转矩控制方法在时刻t2检测到惯性转矩分量cpi的转矩与驾驶员期望设定值cvc的转矩相反,所述惯性转矩分量根据所述车辆的车轮的转速梯度gdrg以及所述牵引传动链的惯性矩来计算。由于该检测,从时刻t2起,所述控制单元在计算发动机转矩cm时停用所述惯性转矩分量。由于在计算发动机转矩cm时不考虑所述惯性转矩,施加给所述车辆的车轮的发动机转矩设定值等于驾驶员设定值cvc的值。这样,驾驶员就不必再踩下油门踏板了。惯性转矩分量的停用通过操控系数k从值1至值0来执行。系数k的值的修正优选地渐进执行,以使驾驶员无法感知到该执行。
[0048]
因此,根据该方法,在正常驾驶情况下,如在时刻t2之前在图表上所示,发动机转矩cm等于转矩cvc与惯性分量cpi的转矩之和。在t2之后的驾驶情况下,转矩cm这次等于转矩cvc。
[0049]
在车辆(例如在具有下降坡度的道路上)加速阶段期间所述驾驶员期望设定值的转矩为负但所述惯性分量的转矩为正的另一种驾驶情况下,所述控制方法停用所述惯性转矩分量以在计算发动机转矩cm时阻止将所述惯性转矩增加至所述驾驶员期望设定值。因此,所述方法避免了驾驶员协调制动。惯性转矩分量的停用通过操控系数k从值1至值0来执行。系数k的值的修正优选地渐进执行,以使驾驶员无法感知到该执行。
[0050]
可设想所述控制方法的两种实施变型,以在所述惯性转矩分量与所述驾驶员期望相反时停用该惯性转矩分量。在第一变型中,所述控制方法包括:计算步骤,所述计算步骤根据所述车桥的车轮的旋转转速梯度gdrg以及所述车桥的牵引传动链的惯性矩来连续计算惯性转矩分量cpi的转矩;然后,确定步骤,所述确定步骤确定惯性转矩分量cpi的转矩的符号;然后,比较步骤,所述比较步骤比较惯性转矩分量cpi的转矩的符号与驾驶员期望设定值cvc的转矩的符号;以及最后,停用步骤,所述停用步骤根据所述比较的结果停用所述惯性转矩分量。当所比较的转矩符号相反时实施所述停用。
[0051]
在第二变型中,所述方法能够根据代表所述车轮的旋转转速梯度的信息或根据车轮角加速度的测量信息来检测到所述惯性分量与所述驾驶员期望设定值相反。该第二变型的优点在于避免为了该检测而计算所述惯性分量的转矩。为此,所述控制方法包括以下步骤:连续测量所述车桥的车轮的旋转转速;计算所述车桥的车轮的旋转转速梯度;比较所述旋转转速梯度的符号与所述驾驶员期望设定值的转矩的符号;以及最后根据所述比较的结果停用所述惯性转矩分量。当所述旋转转速梯度的符号与所述驾驶员期望设定值的转矩的符号相反时实施所述停用。
[0052]
已经描述了根据对所述惯性转矩的计算或根据所述车辆的车轮的旋转转速梯度来确定所述惯性分量的符号。应当理解,对所述惯性分量的符号的确定还可根据由所述车轮的角加速度传感器或由任何其它能够提供代表所述惯性分量的转矩的符号的信息的电子部件提供的测量来确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1