车辆控制装置及车辆控制方法与流程
1.本公开涉及车辆控制装置及车辆控制方法。
背景技术:
2.已知有能够与所有的车速对应地追随前行车辆而行驶的全车速acc(adaptive cruise control:自适应巡航控制)(例如,参照专利文献1)。
3.在先技术文献
4.专利文献
5.专利文献1:日本国特开2016
‑
000976号公报
技术实现要素:
6.发明要解决的技术问题
7.然而,在全车速acc中,怠速停止后的引擎的起动成为问题。在现有的车辆中使怠速停止后的引擎起动的情况下,通过制动器开度减少来进行怠速停止后的引擎的起动,但在全车速acc中由于不需要用户的制动器操作,所以存在无法进行基于制动器开度的引擎的起动这样的问题。
8.本公开的目的是提供一种能够在怠速停止后在适当的定时使引擎起动的车辆控制装置及车辆控制方法。
9.用于解决技术问题的技术手段
10.本公开的车辆控制装置包括:距离测定部,其测量作为本车辆与前行车辆之间的距离的第1前方距离;以及引擎控制部,在所述本车辆处于停止中且搭载于所述本车辆的引擎停止的情况下,若与由所述距离测定部测定的所述第1前方距离相比,由所述距离测定部新测定的第1前方距离增加偏移量以上,则所述引擎控制部使所述引擎起动,该偏移量表示用于判定是否使所述引擎起动的所述第1前方距离的增加量。
11.所述车辆控制装置也可以还包括偏移量控制部,其控制所述偏移量。
12.也可以是,所述车辆控制装置还包括加速度测定部,其测定所述前行车辆的加速度,在所述本车辆处于停止中且所述引擎停止的情况下,在由所述加速度测定部测定的所述前行车辆的加速度大于第1阈值的情况下,所述偏移量控制部使所述偏移量减小,在所述前行车辆的加速度比所述第1阈值以下的第2阈值更小的情况下,所述偏移量控制部使所述偏移量增大。
13.也可以是,所述距离测定部测定作为所述本车辆与后续车之间的距离的后方距离,在所述本车辆处于停止中且所述引擎停止的情况下,在由所述距离测定部测定的所述后方距离大于第3阈值的情况下,所述偏移量控制部使所述偏移量减小,在所述后方距离比所述第3阈值以下的第4阈值更小的情况下,所述偏移量控制部使所述偏移量增大。
14.也可以是,所述距离测定部测定作为所述前行车辆与在所述前行车辆之前行驶的更前行车辆之间的距离的第2前方距离,在所述本车辆处于停止中且所述引擎停止的情况
下,在由所述距离测定部测定的所述第2前方距离大于第5阈值的情况下,所述偏移量控制部使所述偏移量减小,在所述第2前方距离比所述第5阈值以下的第6阈值更小的情况下,所述偏移量控制部使所述偏移量增大。
15.本公开的车辆控制方法,包括由计算机执行的以下步骤:测定本车辆与前行车辆之间的距离;以及若与在所述本车辆处于停止中且搭载于所述本车辆的引擎停止的情况下测定的所述距离相比,新测定的距离增加偏移量以上,则使所述引擎起动,该偏移量表示用于判定是否使所述引擎起动的所述距离的增加量。
16.发明效果
17.根据本公开的车辆控制装置及车辆控制方法,能够在怠速停止后在适当的定时使引擎起动。
附图说明
18.图1a是说明一实施方式的车辆控制装置的概要的图。
19.图1b是说明一实施方式的车辆控制装置的概要的图。
20.图2是示意性地表示一实施方式的车辆的内部结构的图。
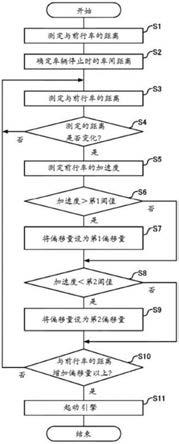
21.图3是表示一实施方式的从车辆的引擎停止起到起动为止的车辆控制装置中的处理的流程的流程图。
具体实施方式
22.图1a及图1b是说明一实施方式的车辆控制装置10的概要的图。车辆控制装置10是搭载于车辆v的ecu(electronic control unit:电子控制单元)等计算机,是通过在车辆v的车速为0km以上的情况下控制车辆v,从而即使驾驶员不操作加速器或换挡杆,也实现使车辆v追随前行车辆lv而行驶的全车速acc的装置。
23.在设定为车辆v按照全车速acc行驶的模式即自动巡航模式的情况下,如图1a所示,在车辆v停止且搭载于车辆v的引擎停止时,车辆控制装置10测定车辆v与前行车辆lv之间的距离db。若前行车辆lv起步,且如图1b所示,新测定的距离dn比距离db增加了偏移量od以上,则车辆控制装置10使引擎起动。并且,车辆控制装置10使车辆v追随前行车辆lv而行驶。
24.由此,车辆v能够不参照制动器开度的量而追随前行车辆lv而行驶。另外,由于车辆控制装置10在车辆v与前行车辆lv之间的距离增加了偏移量od以上的情况下,使引擎起动而进行追随行驶,因此抑制在前行车辆lv微动时起动引擎的情况,能够抑制燃料经济性恶化。因此,车辆控制装置10能够在适当的定时使引擎起动,使车辆v的全车速acc实现。以下,进行车辆控制装置10的详细说明。
25.[车辆v的构成]
[0026]
在进行车辆控制装置10的详细说明时,对车辆v的内部结构进行说明。图2是示意性地表示本实施方式的车辆v的内部结构的图。车辆v具备引擎1、变速器2、距离传感器3以及车辆控制装置10。
[0027]
车辆v例如是将柴油引擎等引擎1作为驱动力的大型车辆,是如上述这样能够按照自动巡航模式行驶的车辆。变速器2将引擎1的旋转驱动力传递到车辆v的驱动轮(未图示)。
变速器2包含用于转换引擎1的旋转驱动力的多级齿轮。
[0028]
距离传感器3例如包含毫米波雷达,设于车辆v的前部。距离传感器3每隔规定时间(例如,数毫秒~数十毫秒)向车辆v的前方照射毫米波,并接收在车辆v的前方行驶的前行车辆lv所反射的毫米波(反射波)。距离传感器3基于从照射毫米波到接收反射波为止的时间,来测定车辆v与前行车辆lv之间的距离。距离传感器3将表示车辆v与前行车辆lv之间的距离的距离信息输出到车辆控制装置10。
[0029]
[车辆控制装置10的结构]
[0030]
接着,参照图2来说明车辆控制装置10的结构。车辆控制装置10如图2所示,包括存储部11和控制部12。
[0031]
存储部11例如是rom(read only memory:只读存储器)或ram(read only memory:随机存取存储器)。存储部11存储用于使控制部12发挥功能的各种程序。
[0032]
控制部12是包含未图示的cpu(central processing unit:中央处理器)等处理器的计算资源。控制部12通过执行存储于存储部11的程序从而作为距离测定部121、加速度测定部122、偏移量控制部123、引擎控制部124以及行驶控制部125发挥功能。
[0033]
距离测定部121通过从距离传感器3取得距离信息来测定车辆v与前行车辆lv之间的距离。
[0034]
加速度测定部122测定前行车辆lv的加速度。例如,在车辆v处于停止中且引擎1停止的情况下,加速度测定部122通过对距离测定部121所测定的距离进行2次微分,来测定前行车辆lv的加速度。
[0035]
偏移量控制部123控制偏移量,该偏移量用于判定是否使引擎1起动,表示车辆v与前行车辆lv之间的距离的增加量。具体地说,在车辆v处于停止中且引擎1停止的情况下,在由加速度测定部122测定的前行车辆lv的加速度大于第1阈值的情况下,偏移量控制部123使偏移量减小。另外,在前行车辆lv的加速度比第1阈值以下的第2阈值更小的情况下,偏移量控制部123使偏移量增大。
[0036]
例如,在车辆v处于停止中且引擎1停止的情况下测定的前行车辆lv的加速度大于第1阈值的情况下,偏移量控制部123将偏移量设定为比预先确定的偏移量更小的的第1偏移量。另外,在车辆v处于停止中且引擎1停止的情况下测定的前行车辆lv的加速度小于第2阈值的情况下,偏移量控制部123将偏移量设定为比预先确定的偏移量更大的第2偏移量。
[0037]
在前行车辆lv的加速度相对较大的情况下,认为前行车辆lv的驾驶员想要使前行车辆lv起步并继续行驶的可能性较高。另外,在前行车辆lv的加速度相对较小的情况下,认为前行车辆lv的驾驶员想要缩短从前行车辆lv到更前行车辆的距离,并再次停止的可能性较高。因此,车辆控制装置10通过基于前行车辆lv的加速度使偏移量变化,从而能够反映前行车辆lv的行驶开始状况来控制是否使引擎1起动。
[0038]
此外,也可以是,距离传感器3也设于车辆v的后部,测定车辆v与在车辆v的正后方行驶的后续车(未图示)之间的距离。并且,也可以是,距离传感器3将表示该距离的第2距离信息输出到车辆控制装置10,距离测定部121通过取得第2距离信息来测定车辆v与后续车之间的距离。
[0039]
也可以是,在距离测定部121所测定的车辆v与后续车之间的距离大于第3阈值的情况下,偏移量控制部123使偏移量减小,在车辆v与后续车之间的距离比第3阈值以下的第
4阈值更小的情况下,偏移量控制部123使偏移量增大。通过这样,车辆控制装置10在车辆v与后续车的间隔过度缩短的情况下,能够增大偏移量。由此,即使在车辆v在拥堵中的道路等行驶的情况下,也能够增大追随前行车辆lv行驶的情况下的一次中的行驶距离,后续车也能够增大起步了的情况下的行驶距离。通过这样,车辆控制装置10能够抑制后续车频繁地反复进行起步和停止,有助于缓和拥堵。
[0040]
另外,车辆控制装置10也可以还包括拍摄车辆v的前方的照相机(未图示)。例如,照相机设于车辆v的驾驶座等的上部,不仅拍摄前行车辆lv,还能够拍摄在前行车辆lv之前行驶的更前行车辆。车辆控制装置10的距离测定部121通过对照相机所拍摄的图像进行解析,从而测定在前行车辆之前行驶的更前行车辆与车辆v之间的距离,并且测定前行车辆lv的车辆长度。并且,距离测定部121也可以根据以从距离传感器3取得的距离信息为基础的车辆v与前行车辆lv之间的距离、前行车辆lv的车辆长度、车辆v与更前行车辆之间的距离,来测定前行车辆lv与更前行车辆之间的距离。
[0041]
在这种情况下,也可以是,在前行车辆lv与更前行车辆之间的距离大于第5阈值的情况下,偏移量控制部123使偏移量减小,在前行车辆lv与更前行车辆之间的距离比第5阈值以下的第6阈值更小的情况下,偏移量控制部123使偏移量增大。通过这样,在更前行车辆与前行车辆lv的间隔过度缩短的情况下,车辆控制装置10能够增大偏移量。由此,在车辆v在拥堵中的道路等行驶的情况下,在更前行车辆与前行车辆lv的间隔过度缩短时,能够有富余地起步,能够增大车辆v起步的情况下的行驶距离。通过这样,车辆控制装置10能够抑制车辆v频繁地反复进行起步和停止,其结果,也能够抑制后续车频繁地反复进行起步和停止,因此有助于缓和拥堵。
[0042]
此外,偏移量控制部123也可以基于前行车辆的加速度、车辆v与后续车之间的距离、前行车辆lv与更前行车辆之间的距离中的至少一个而使偏移量变化。通过这样,车辆控制装置10能够基于在车辆v的前后行驶的车辆的状况而将偏移量设为适当的值。
[0043]
在车辆v处于停止中且引擎1停止的情况下,若与由距离测定部121测定的车辆v与前行车辆lv之间的距离相比,由距离测定部121新测定的该距离增加了偏移量以上,则引擎控制部124使引擎1起动。
[0044]
具体地说,在车辆v处于停止中且搭载于车辆v的引擎1停止的情况下,在由距离测定部121测定的车辆v与前行车辆lv之间的距离在规定时间(例如,3秒以上)以上没有变化时,引擎控制部124将该距离确定为车辆v停止时的车间距离。
[0045]
引擎控制部124在确定了车辆v停止时的车间距离后,若由距离测定部121新测定的车辆v与前行车辆lv之间的距离与该车间距离相比增加了偏移量以上,则使引擎1起动。
[0046]
若通过引擎控制部124的控制使引擎1起动,则行驶控制部125通过控制引擎控制部124,并且控制变速器2,从而使车辆v追随前行车辆lv而行驶。
[0047]
[使引擎1起动的处理的流程]
[0048]
接着,对从车辆v停止且引擎1停止起到引擎1起动为止的车辆控制装置10中的处理的流程进行说明。图3是表示本实施方式的从车辆v的引擎1停止起到起动为止的车辆控制装置10中的处理的流程的流程图。此外,在本流程图中,偏移量控制部123基于前行车辆lv的加速度来控制偏移量。
[0049]
首先,距离测定部121测定车辆v与前行车辆lv之间的距离(s1)。引擎控制部124在
车辆v处于停止中且引擎1停止的情况下,确定车辆v停止时的与前行车辆lv的车间距离(s2)。
[0050]
接着,距离测定部121测定车辆v与前行车辆lv之间的距离(s3)。
[0051]
接着,引擎控制部124判定在s3中测定的前行车辆lv与车辆v之间的距离是否发生了变化(s4)。引擎控制部124若判定为从车辆v到前行车辆lv的距离发生了变化,则将处理移至s5,若判定为从车辆v到前行车辆lv的距离没有变化,则将处理转移至s3。
[0052]
接着,加速度测定部122基于所测定的距离来测定前行车辆lv的加速度(s5)。
[0053]
接着,偏移量控制部123判定所测定的前行车辆lv的加速度是否大于第1阈值(s6)。偏移量控制部123若判定为所测定的前行车辆lv的加速度大于第1阈值,则将处理移至s7,将偏移量设定为小于预先确定的偏移量的第1偏移量。偏移量控制部123若判定为所测定的前行车辆lv的加速度为第1阈值以下,则将处理移至s8。
[0054]
在s8中,偏移量控制部123判定所测定的前行车辆lv的加速度是否小于第2阈值。偏移量控制部123若判定为所测定的前行车辆lv的加速度小于第2阈值,则将处理移至s9,将偏移量设定为大于预先确定的偏移量的第2偏移量。偏移量控制部123若判定为所测定的前行车辆lv的加速度为第2阈值以上,则将处理移至s10。
[0055]
接着,引擎控制部124判定在s3中测定的前行车辆lv与车辆v之间的距离与在s2中确定的车间距离相比是否增加了偏移量以上(s10)。引擎控制部124若判定为从车辆v到前行车辆lv为止的距离增加了偏移量以上,则将处理移至s11,使引擎1起动,若判定为从车辆v到前行车辆lv为止的距离未增加偏移量以上,则将处理移至s3。
[0056]
[本实施方式的效果]
[0057]
如以上说明,本实施方式的车辆控制装置10在与在车辆v处于停止中且搭载于车辆v的引擎1停止的情况下测定的、车辆v与前行车辆lv之间的距离相比,新测定的车辆v与前行车辆lv之间的距离增加偏移量以上时,使引擎1起动,所述偏移量表示用于判定是否使引擎1起动的该距离的增加量。
[0058]
由此,由于车辆控制装置10在车辆v与前行车辆lv之间的距离增加了偏移量以上的情况下使引擎1起动而进行追随行驶,因此抑制在前行车辆lv微动时使引擎1起动,能够抑制燃料经济性恶化。因此,车辆控制装置10能够在适当的定时使引擎1起动,从而使车辆v的全车速acc实现。
[0059]
以上,使用实施方式说明了本公开,但本公开的技术范围不限定于上述实施方式所述的范围,在其主旨的范围内能够进行各种变形及变更。
[0060]
例如,在上述实施方式中,在车辆v处于停止中且搭载于车辆v的引擎1停止的情况下,在由距离测定部121测定的车辆v与前行车辆lv之间的距离在规定时间以上没有变化时,引擎控制部124将该距离确定为车辆v停止时的车间距离,但不限于此。例如,也可以是,在行驶控制部125追随前行车辆lv使车辆v停止的情况下,以前行车辆lv与车辆v之间的距离成为预先确定的车间距离的方式使车辆v停止。
[0061]
另外,例如,装置的分散/统合的具体实施方式不限于以上的实施方式,对于其全部或一部分,能够以任意的单位功能性或物理性地进行分散/统合而构成。另外,通过多个实施方式的任意组合而产生的新的实施方式也包含于本公开的实施方式。通过组合而产生的新的实施方式的效果兼具原来的实施方式的效果。
[0062]
本申请基于2018年9月13日申请的日本国专利申请(特愿2018
‑
171744),并将其内容作为参考援引至此。
[0063]
工业可利用性
[0064]
本公开的车辆控制装置以及车辆控制方法在怠速停止后在适当的定时使引擎起动这一点上是有用的。
[0065]
附图标记说明
[0066]1…
引擎
[0067]2…
变速器
[0068]3…
距离传感器
[0069]
10
…
车辆控制装置
[0070]
11
…
存储部
[0071]
12
…
控制部
[0072]
121
…
距离测定部
[0073]
122
…
加速度测定部
[0074]
123
…
偏移量测定部
[0075]
124
…
引擎控制部
[0076]
125
…
行驶控制部
[0077]
v
…
车辆
[0078]
lv
…
前行车辆
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1