一种滚动优化预测闭环控制器及系统的制作方法
1.本发明涉及发动机推力控制领域,更具体的说,涉及一种滚动优化预测闭环控制器及系统。
背景技术:
2.航空发动机的工程应用领域发展到全权限数字技术时代后,对发动机的安全运行保护相关的需求不断提高,尤其是在动态运行过程中的推力控制的准确度,全球上各大飞机发动机生产商和相关科研机构均投入大量的研发资源研究。
3.目前各大发动机oem(original equipment manufacturer,定点生产)计划极少报道过,采用机载控制器对发动机的推力直接进行闭环控制,工程上一般采用试车台(地面、飞行等)上标定推力和转速的关系,采用换算转速表和推力的关系曲线,对换算转速进行控制来达到推力控制的目的。
4.这种方式的特点是需要对发动机的各种运行场景进行试车标定,开发成本较高且动态自适应能力较差。
5.中国发明cn201710931188.5采用模型预测控制的思路,提出了一种基于模型预测控制的混合动力船舶的能量管理方法;选取马尔科夫模型对混合动力船舶需求功率进行预测,结合模型预测控制的原理,运用动态规划的方法在预测时域内以燃油消耗最小化为目标进行功率分配的优化。该方法存在理论求解方法的步骤繁琐问题。
6.中国发明cn201711134813.x公开了一种自适应rbf神经网络进行航空发动机推力估计的算法,基于粒子群算法提出了自适应rbf神经网络。在改进的粒子群算法中,针对不同的网络隐含层节点数,设置与隐含层节点数种类个数相同的局部最优解。该方法同样存在理论求解方法的步骤繁琐问题。
技术实现要素:
7.本发明的目的是提供一种滚动优化预测闭环控制器及系统,解决现有技术的发送机动态推力预测控制求解复杂、性能较差的问题。
8.为了实现上述目的,本发明提供了一种滚动优化预测闭环控制器,包括推力管理器、信号处理器、控制器参数调度器、推力预测闭环控制器和燃油控制量选择器:
9.推力管理器,根据的油门杆角度信号和推力模式信号,计算得到发动机运行推力期望指令并输出到推力预测闭环控制器;
10.信号处理器,根据采集到得原始传感器信号,完成标定转化后信号真实物理数值的计算,并输出到相应模块;
11.控制器系数调度器,接收信号处理器发送的涡扇发动机高压转子换算转速信号,结合存储的离线获取的信息,向推力预测闭环控制器提供所需要的发动机动态模型信息;
12.推力预测闭环控制器,根据控制器系数调度器提供的发动机动态模型信息和信号处理器提供的第一发动机状态信息,进行推力预测闭环所需要的燃油控制量的计算,将计
算结果发送给燃油控制量选择器;
13.燃油控制量选择器,对燃油控制量进行选择,输出对应的燃油指令。
14.在一实施例中,所述发动机动态模型如下所示:
[0015][0016]
x=[π,δ]
t
,u=[α
i
,β]
t
;π=ps3/po;
[0017][0018]
w
f
(t)=α
i
·
δ(t)+β(t);
[0019]
其中,f为发动机动态方程,x为动态方程的运动状态,u为动态方程输入量,π为整个发动机的落亚比,α
i
为线性系数,β为增益系数,ps3为高压压气机出口静压,p0为发动机工作环境温度,f
d
为发动机运行推力期望,f
e
为发动机运行产生的实际推力,w
f
为燃油控制量。
[0020]
在一实施例中,所述推力预测闭环控制器包括初始值计算模块、离散最优化矩阵计算模块、初始控制规律计算模块、控制规律计算模块、采样值更新计算模块、雅克比矩阵计算模块、控制规律变化率计算模块和递推最小二乘计算模块:
[0021]
所述初始值计算模块,预设对应变量的初始数值;
[0022]
所述离散最优化矩阵计算模块,通过c矩阵和h矩阵计算控制器最优矩阵;
[0023]
所述初始控制规律计算模块,根据初始值计算模块的输入参数,以及离散最优矩阵计算模块输入的h矩阵和c矩阵,基于递推最小二乘计算模块完成初始控制规律在最小二乘意义下的近似解计算,将结果输出到控制规律计算模块;
[0024]
所述控制规律计算模块,根据初始控制规律和控制规律变化率,进行每一拍单位时间的燃油控制量的计算,并将结果输出到采样值更新计算模块,最终的燃油控制量结果发送至燃油控制量选择器;
[0025]
所述采样值更新计算模块,按照控制规律计算模块的计算值,对每一拍单位时间的燃油控制量的采样值进行更新计算,输出结果到雅克比矩阵计算模块;
[0026]
所述雅克比矩阵计算模块,根据初始值计算模块的输入参数,进行每一拍单位时间的雅克比矩阵的更新计算,输出结果到控制规律变化率计算模块;
[0027]
所述控制规律变化率计算模块,根据初始值计算模块的输入参数,基于递推最小二乘计算模块,完成控制规律变化率在最小二乘意义下的近似解计算,输出到控制规律计算模块;
[0028]
所述递推最小二乘计算模块,用基于轮转变换方法,完成输入方程的最小二乘意义方程求解计算。
[0029]
在一实施例中,还包括稳态闭环控制器和推力计划转换器:
[0030]
所述推力计划转换器,与推力管理器连接,根据推力计划转换器发送的发动机运行推力期望指令,进行稳态控制的目标计算,计算得到涡扇发动机低压轴转速目标控制转速和涡扇发动机高压轴转速目标控制转速并输出给稳态闭环控制器;
[0031]
所述控制器系数调度器,向稳态闭环控制器提供所需要的控制参数和已有规律计算输出功能;
[0032]
所述稳态闭环控制器,与推力计划转换器连接,根据控制器系数调度器提供的稳
态控制器控制参数信息和信号处理器提供的第二发动机状态信息,进行转速闭环所需要的发动机稳态燃油控制量的计算,将计算结果发送给燃油控制量选择器。
[0033]
在一实施例中,所述发动机稳态燃油控制量的计算方法,采用比例-微分-积分控制器、滑模控制器和状态反馈。
[0034]
在一实施例中,还包括过渡态控制器:
[0035]
所述推力计划转换器,根据发动机运行推力期望指令进行过渡态控制的目标计算,计算得到涡扇发动机低压轴转速目标控制转速的变化率和涡扇发动机高压轴转速目标控制转速的变化率并输出给过渡态控制器
[0036]
所述控制器系数调度器,向过渡态控制器提供所需要的控制参数和已有规律计算输出功能;
[0037]
所述过渡态控制器,与推力计划转换器连接,根据控制器系数调度器提供的过渡态控制器控制参数信息和信号处理器提供的第三发动机状态信息,进行加速控制所需要的发动机加速燃油控制量和发动机减速燃油控制量的计算,将计算结果发送给燃油控制量选择器。
[0038]
在一实施例中,所述发动机加速燃油控制量和发动机减速燃油控制量的计算方法,采用比例-微分-积分控制器、滑模控制器和前馈串联积分。
[0039]
在一实施例中,还包括发动机状态调度器,根据信号处理器提供的信息,判断发动机所处的状态,并根据当前状态完成发动机的工作策略信号的设定,输出工作策略信号给燃油控制量选择器。
[0040]
在一实施例中,还包括燃油控制量选择器,根据来自发动机状态调度器的工作策略信号,对推力预测闭环控制器、稳态闭环控制器和过渡态控制器发送的燃油控制量进行选择,输出对应的燃油指令。
[0041]
在一实施例中,所述燃油控制量选择器的工作策略选择逻辑包括:
[0042]
当工作策略为推力预测模式时,燃油指令采用推力预测闭环控制器发送的燃油控制量,不区分稳态和过渡态;
[0043]
当工作策略为正常转速控制模式时,基于过渡态控制器和稳态闭环控制器发送的燃油控制量,采用高低选规律,完成燃油指令计算。
[0044]
在一实施例中,还包括伺服执行机构闭环控制器,根据燃油控制量选择器输出的燃油指令,并将其转换为计量机构的位置期望信号,同时接收信号处理器输入的计量机构实际位置反馈信号,根据两者的偏差完成伺服控制电流量的计算。
[0045]
为了实现上述目的,本发明提出一种发动机滚动优化预测闭环控制系统,包括采用如上所述的滚动优化预测闭环控制器以及机载传感器、执行机构:
[0046]
所述机载传感器,与滚动优化预测闭环控制器连接,采集发动机本体信号并发送到滚动优化预测闭环控制器;
[0047]
所述执行机构,与滚动优化预测闭环控制器连接,根据滚动优化预测闭环控制器输出的控制指令执行对应动作。
[0048]
本发明提出的一种滚动优化预测闭环控制器和发动机滚动优化预测闭环控制系统,采用了基于模型的推力闭环预测控制算法进行燃油控制量进行预测,实施闭环推力控制调节,具体具有以下有益效果:
[0049]
1)预测控制算法可以实现发动机动态运行推力预测的闭环控制,从控制器的形式上更加精简,一个推力预测闭环控制器即可实现传统的稳态和过渡态两类控制器的功能;
[0050]
2)改进了发动机推力控制系统开发的效率,可以采用基于模型的方式代替了一部分试车的工作,缩短控制系统开发的时间周期;
[0051]
3)改善了发动机动态过程的控制性能指标,采用动态过程性能指标最优化的方式,并采用基于初猜值的有限步迭代求解算法,在推力闭环控制性能指标满足的基础上,确保了燃油控制量计算的实时性问题。
附图说明
[0052]
本发明上述的以及其他的特征、性质和优势将通过下面结合附图和实施例的描述而变的更加明显,在附图中相同的附图标记始终表示相同的特征,其中:
[0053]
图1揭示了根据本发明一实施例的基于模型的发动机滚动优化预测闭环控制系统原理图;
[0054]
图2揭示了根据本发明一实施例的滚动优化预测闭环控制器的内部流程图;
[0055]
图3揭示了根据本发明一实施例的推力预测闭环控制器的内部原理图。
[0056]
图中各附图标记的含义如下:
[0057]
10 滚动优化预测闭环控制器;
[0058]
11 推力管理器;
[0059]
12 推力计划转换器;
[0060]
13 信号处理器;
[0061]
14 控制器参数调度器;
[0062]
15 推力预测闭环控制器;
[0063]
151 初始值计算模块;
[0064]
152 离散最优化矩阵计算模块;
[0065]
153 初始控制规律计算模块;
[0066]
154 控制规律计算模块;
[0067]
155 采样值更新计算模块;
[0068]
156 雅克比矩阵计算模块;
[0069]
157 控制规律变化率计算模块;
[0070]
158 递推最小二乘计算模块;
[0071]
16 稳态闭环控制器;
[0072]
17 过渡态控制器;
[0073]
18 发动机状态调度器;
[0074]
19 燃油控制量选择器;
[0075]
110 伺服执行机构闭环控制器;
[0076]
20 机载传感器;
[0077]
30 执行机构;
[0078]
40 发动机滚动优化预测闭环控制系统;
[0079]
50 发动机本体;
[0080]
60 飞机硬线信号;
[0081]
70 飞机总线信号。
具体实施方式
[0082]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释发明,并不用于限定发明。
[0083]
本发明提出了一种基于模型的发动机滚动优化预测闭环控制系统,解决了发动机控制过程中,特别是过渡态控制中的闭环控制的性能超调问题,进一步提升了发动机运行闭环推力控制的可预测性。
[0084]
图1揭示了根据本发明一实施例的基于模型的发动机滚动优化预测闭环控制系统原理图,如图1所示,本发明提出了一种基于模型的发动机滚动优化预测闭环控制系统,主要包括滚动优化预测闭环控制器10、发动机的机载传感器20和执行机构30。
[0085]
机载传感器20,采集发动机本体信号。
[0086]
滚动优化预测闭环控制器10,采集和接收飞机硬线信号60、飞机总线信号70。
[0087]
滚动优化预测闭环控制器10,适用于在线、实时的控制。
[0088]
滚动优化预测闭环控制器10,采用的发动机动态模型可以通过离线理论计算或者试验获得。
[0089]
针对滚动优化预测闭环控制器10,本发明提出了一种基于模型的推力闭环预测控制算法,在确保一定的优化性能指标最优前提下,保证发动机运行沿着期望的推力曲线运动。
[0090]
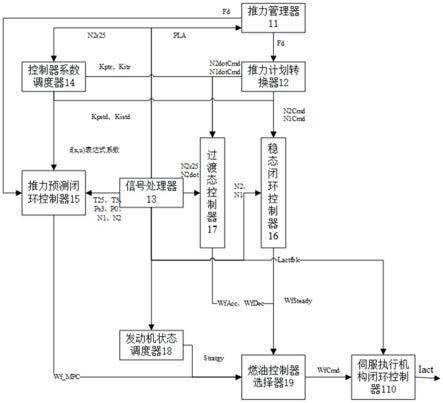
图2揭示了根据本发明一实施例的滚动优化预测闭环控制器的内部流程图,如图2所示,本发明的滚动优化预测闭环控制器10,主要包括:
[0091]
推力管理器11、推力计划转换器12、信号处理器13、控制器参数调度器14、推力预测闭环控制器15、稳态闭环控制器16、过渡态控制器17、发动机状态调度器18、燃油控制量选择器19和伺服执行机构闭环控制器110。
[0092]
所述推力管理器11,与推力计划转换器12、信号处理器13、推力预测闭环控制器15连接。
[0093]
推力管理器11,根据信号处理器13发送的油门杆角度信号pla和推力模式信号thrustmode等信号,计算得到发动机运行推力期望指令fd,输出到推力计划转换器12和推力预测闭环控制器15。油门杆角度信号pla的单位为
°
。
[0094]
推力计划转换器12,与稳态闭环控制器16连接,根据发动机运行推力期望指令fd,进行稳态控制的目标计算,计算涡扇发动机低压轴转速目标控制转速n1cmd和涡扇发动机高压轴转速目标控制转速n2cmd,输出给稳态闭环控制器16;
[0095]
所述推力计划转换器12,与过渡态控制器17连接,根据发动机运行推力期望指令fd,进行过渡态控制的目标计算,计算涡扇发动机低压轴转速目标控制转速的变化率n1dotcmd和涡扇发动机高压轴转速目标控制转速的变化率n2dotcmd,输出给过渡态控制器17。
[0096]
所述信号处理器13,与推力管理器11、控制器参数调度器14、推力预测闭环控制器
15、稳态闭环控制器16、过渡态控制器17、发动机状态调度器18和伺服执行机构闭环控制器110连接。
[0097]
信号处理器13,根据采集到得原始传感器信号,完成标定转化后信号真实物理数值的计算,并输出给上述其他模块计算使用。
[0098]
所述控制器系数调度器14,与信号处理器13、推力预测闭环控制器15、过渡态控制器17和稳态闭环控制器16连接。
[0099]
控制器系数调度器14,接收信号处理器13发送的涡扇发动机高压转子换算转速信号n2r25,结合存储的离线获取的信息,向过渡态控制器17和稳态闭环控制器16提供所需要的控制参数和已有规律计算输出功能,向推力预测闭环控制器15提供所需要的发动机动态模型信息。
[0100]
其中,控制器系数调度器14向过渡态控制器17提供的控制参数包括预测控制器参数kptr和kitr。
[0101]
控制器系数调度器14向稳态闭环控制器16提供的控制参数包括传统控制器参数kpstd和kistd。
[0102]
控制器系数调度器14向推力预测闭环控制器15提供所需要的发动机动态模型信息,所述发动机动态模型信息为发动机动态模型函数f(x,u)的表达式系数。
[0103]
所述发动机动态模型具体如下:
[0104][0105]
其中,x=[π,δ]
t
,u=[α
i
,β]
t
;π=ps3/po;
[0106][0107]
w
f
(t)=α
i
·
δ(t)+β(t);
[0108]
其中,f为发动机动态方程,x为动态方程的运动状态,u为动态方程输入量,π为整个发动机的落亚比,α
i
为线性系数,β为增益系数,ps3为高压压气机出口静压,单位为kpa,p0为发动机工作环境温度,f
d
为发动机运行推力期望,f
e
为发动机运行产生的实际推力,单位为kn,w
f
为燃油控制量,单位为kg/h。
[0109]
所述推力预测闭环控制器15,与推力管理器11、信号处理器13、控制器系数调度器104和燃油控制量选择器19连接。
[0110]
推力预测闭环控制器15,根据控制器系数调度器104提供的发动机动态模型信息和信号处理器13提供的第一发动机状态信息,进行推力预测闭环所需要的燃油控制量wf_mpc的计算,将获得的wf_mpc信号给燃油控制量选择器19。燃油控制量wf_mpc的单位为kg/h。
[0111]
所述信号处理器13提供的第一发动机状态信息,包括高压压气机入口总温t25、高压压气机出口总温t3、高压压气机出口静压ps3、发动机工作环境温度p0、涡扇发动机低压轴转速n1和涡扇发动机高压轴转速n2。
[0112]
高压压气机入口总温t25、高压压气机出口总温t3和发动机工作环境温度p0的单位为k。高压压气机出口静压ps3的单位为kpa。涡扇发动机低压轴转速n1和涡扇发动机高压轴转速n2的单位为rpm。
[0113]
所述稳态闭环控制器16,与推力计划转换器12、信号处理器13、控制器系数调度器
104和燃油控制量选择器19连接。
[0114]
稳态闭环控制器16,根据控制器系数调度器104提供的稳态控制器控制参数信息和信号处理器13提供的第二发动机状态信息,进行转速闭环所需要的发动机稳态燃油控制量wf_steady的计算,将获得的wf_steady信号输出给燃油控制量选择器19。燃油控制量wf_steady的单位为kg/h。
[0115]
所述信号处理器13提供的第二发动机状态信息,包括涡扇发动机低压轴转速n1和涡扇发动机高压轴转速n2。其中,n1和n2的单位为rpm。
[0116]
发动机稳态燃油控制量wf_steady的计算方法,可以采用传统的比例-微分-积分控制器、滑模控制器和状态反馈等。
[0117]
所述过渡态控制器17,与推力计划转换器12、信号处理器13、控制器系数调度器104和燃油控制量选择器19连接。
[0118]
过渡态控制器17,根据控制器系数调度器104提供的过渡态控制器控制参数信息和信号处理器13提供的第三发动机状态信息,进行加速控制所需要的发动机加速燃油控制量wf_acc和发动机减速燃油控制量wf_dec的计算,将获得的wf_acc和wf_dec信号输出给燃油控制量选择器19。燃油控制量wf_acc和wf_dec的单位为kg/h。
[0119]
所述信号处理器13提供的第三发动机状态信息,包括涡扇发动机高压转子换算转速n2r25和涡扇发动机高压轴转速的变化率n2dot,n2r25单位为rpm,n2dot单位为rpm/s。
[0120]
发动机加速燃油控制量wf_acc和发动机减速燃油控制量wf_dec的计算方法,可以采用传统的比例-微分-积分控制器、滑模控制器和前馈串联积分等。
[0121]
所述发动机状态调度器18,与信号处理器13、燃油控制器选择器109连接。
[0122]
发动机状态调度器18,根据信号处理器13提供的信息,判断发动机所处的状态,并根据当前状态完成发动机的工作策略stratgy信号的设定,输出stratgy信号给燃油控制量选择器19。
[0123]
发动机所处的状态,包括正常状态、备用状态和安全状态等。
[0124]
工作策略stratgy的设定,可以基于状态机理论进行设计。
[0125]
所述燃油控制量选择器19,与推力预测闭环控制器15、稳态闭环控制器16、过渡态控制器17、发动机状态调度器18连接。
[0126]
燃油控制量选择器19,根据来自发动机状态调度器18的工作策略stratgy,对推力预测闭环控制器15发送的燃油控制量wf_mpc,过渡态控制器17发送的燃油控制量wf_acc和燃油控制量wf_dec,稳态闭环控制器16发送的燃油控制量wfsteady进行选择,输出对应的燃油指令wfcmd,具体选择逻辑如下:
[0127]
a)当工作策略stratgy为推力预测模式时,燃油指令wfcmd采用燃油控制量wf_mpc,不区分稳态和过渡态;
[0128]
b)当工作策略stratgy为正常转速控制模式时,基于燃油控制量wf_acc、wf_dec和wfsteady,采用高低选规律,完成燃油指令wfcmd计算,所述高低选规律为,加速采用三者中的最低值,减速选择三者中的最高值。
[0129]
所述伺服执行机构闭环控制器110,与信号处理器13、燃油控制器选择器109连接。
[0130]
伺服执行机构闭环控制器110,根据燃油控制量选择器19输出的燃油指令wfcmd,并将其转换为计量机构的位置期望信号lactdmd,同时接收信号处理器13输入的计量机构
实际位置反馈信号lactfbk,根据两者的偏差完成伺服控制电流量iact的计算。
[0131]
本发明提出的推力预测闭环控制器,基于预测控制方法,通过动态过程指标最优化思想,采用改进的最优化算法获取发动机推力闭环预测控制的燃油控制量。
[0132]
图3揭示了根据本发明一实施例的推力预测闭环控制器的内部原理图,如图3所示,推力预测闭环控制器15包括以下模块,初始值计算模块151、离散最优化矩阵计算模块152、初始控制规律计算模块153、控制规律计算模块154、采样值更新计算模块155、雅克比矩阵计算模块156、控制规律变化率计算模块157和递推最小二乘计算模块158。
[0133]
初始值计算模块151,与离散最优化矩阵计算模块152、初始控制规律计算模块153连接,进行初始值计算,计算推力预测闭环控制器15中各变量的初始数值。
[0134]
推力预测闭环控制器15中的变量包括:
[0135]
a)t=0,其中,t为时刻,单位为s;
[0136]
b)
△
t=ts,其中,ts为采样时间,单位为s;
[0137]
c)x(k)=x_sample(k
△
t),其中,x_sample(k
△
t)为k
△
t时刻的采样得到的状态值,k=0,1,2...;
[0138]
d)x0=x(0),其中,x0为初值变量,x(0)为状态矢量x的第一个位置处的数值;
[0139]
e)其中,为u
t
对时间的变化率,u
t
为增广控制量矩阵;
[0140]
f)a,b,其中,a为[1,0;0,1],b为[1;1];
[0141]
g)firstflag1=0,其中,firstflag1为第一中间变量;
[0142]
h)firstflag2=0,其中,firstflag2为第二中间变量。
[0143]
离散最优化矩阵计算模块152,与初始控制规律计算模块153连接,进行离散最优化矩阵计算,根据如下公式完成控制器最优矩阵f计算。
[0144]
计算c矩阵,将不等式转换为方程:
[0145][0146]
其中,本实施例中,符号“:=”为定义动作,即将定义为后续的公式。
[0147][0148][0149]
上标t表示转置。
[0150]
其中,x为动态方程的运动状态,为定义的增广控制量,u为动态方程输入量,u
′1为的第三元素,u
′2为的第四元素,u
′3为的第五元素,α
i
为线性系数,α
imin
为线性系数最小值,w
f
为燃油控制量,w
fmax
为燃油控制量最大值,w
fmin
为燃油控制量最小值。
[0151]
计算h矩阵:
[0152][0153]
[0154][0155]
其中,x为动态方程的运动状态,为定义的增广后的控制量,μ、λ为计算过程参数,f为发动机动态方程,r1、r2和r3为计算过程参数,f
d
为发动机运行推力期望,f
e
为发动机运行产生的实际推力,α
i
为线性系数,β为增益系数,t为时刻,n为增广控制量矩阵u
t
的维度。
[0156]
通过c矩阵和h矩阵计算控制器最优矩阵f:
[0157][0158]
其中,为定义的增广后的控制量,μ、λ为计算过程参数,x为动态方程的运动状态,n为u
t
的维度。
[0159]
初始控制规律计算模块153,与控制规律计算模块154、递推最小二乘计算模块158连接,根据初始值计算模块的输入参数,以及离散最优矩阵计算模块输入的h矩阵和c矩阵,进行初始控制规律计算,基于递推最小二乘计算模块完成初始控制规律在最小二乘意义下的近似解计算,将结果输出到控制规律计算模块154。
[0160]
根据如下公式完成计算:
[0161]
初始控制规律为μ0,根据来自初始值计算模块151输入的x0和u0,以及离散最优矩阵计算模块152输入的h矩阵和c矩阵,基于递推最小二乘计算模块158完成如下方程最小二乘意义下的近似解μ0计算。
[0162]
h
t
(x0,u0,0,μ0)=0
[0163]
c
t
(x0,u0)=0
[0164]
其中,x0为预设的状态量初值,取输入的x0;
[0165]
u0为预设的控制量初值。
[0166]
控制规律计算模块154,与采样值更新计算模块155、控制规律变化率计算模块157、燃油控制量选择器19连接,根据初始控制规律和控制规律变化率,进行控制规律计算,完成推力预测闭环控制器每一拍单位时间的燃油控制量计算,并将结果输出到采样值更新计算模块155,将最终完成的燃油控制量结果发送至燃油控制量选择器19。
[0167]
以下伪代码计算公式即为每一拍的控制量计算方法,firstflag1=1为初始时刻,采用第一个分支的计算,其它时刻是第二个分支的计算。
[0168]
输入参数:增广控制量u的初始时刻值u0[0],u
t
对时间的变化率
[0169][0170]
输出参数:初始时刻的燃油控制量wf*(0),在时刻τ的燃油控制量wf(τ)。
[0171]
采样值更新计算模块155,与雅克比矩阵计算模块156连接,采样值更新计算,按照控制规律计算模块的计算值,完成推力预测闭环控制器每一拍的采样值的更新计算,输出结果到雅克比矩阵计算模块156。
[0172]
根据u
t
对时间的变化率那么,通过一个队时间步
△
t的积分,根据当前的u
t
求出下一采样时刻的值u
t+
△
t
。
[0173]
以下公式即为每一拍的采样值的计算方法:
[0174]
x
t
=x(t+
△
t);
[0175]
x
t+
△
t
=x(t+
△
t);(t是当前时刻计算的采样值,t+
△
t是下一个采样时刻计算的数值)
[0176][0177]
雅克比矩阵计算模块156,与控制规律变化率计算模块157连接,根据来自初始值计算模块151输入的动态方程的运动状态参数x,采用如下公式完成推力预测闭环控制器每一拍的雅克比矩阵的更新计算,输出结果到控制规律变化率计算模块157。
[0178]
以下伪代码计算公式即为每一拍的雅克比矩阵的更新计算方法,firstflag2=1为初始时刻,采用第一个分支的计算,其它时刻是第二个分支的计算。
[0179][0180]
其中,为t时刻的估计值,ζ、b、a为雅克比矩阵参数。
[0181]
控制规律变化率计算模块157,与控制规律计算模块154、递推最小二乘计算模块158连接,进行控制规律变化率更新计算,输出到控制规律计算模块154。
[0182]
控制规律变化率为为对根据来自初始值计算模块151输入的a和b,基于递推最小二乘计算模块158完成如下方程最小二乘意义下的近似解计算。
[0183][0184]
其中,为u
t
对时间的变化率,b、a为雅克比矩阵参数。
[0185]
递推最小二乘计算模块158,采用基于轮转变换方法,完成输入方程的最小二乘意义方程求解计算。
[0186]
本发明提出的一种滚动优化预测闭环控制器和发动机滚动优化预测闭环控制系统,采用了基于模型的推力闭环预测控制算法进行燃油控制量进行预测,实施闭环推力控制调节,具体具有以下有益效果:
[0187]
1)预测控制算法可以实现发动机动态运行推力预测的闭环控制,从控制器的形式上更加精简,一个推力预测闭环控制器即可实现传统的稳态和过渡态两类控制器的功能;
[0188]
2)改进了发动机推力控制系统开发的效率,可以采用基于模型的方式代替了一部分试车的工作,缩短控制系统开发的时间周期;
[0189]
3)改善了发动机动态过程的控制性能指标,采用动态过程性能指标最优化的方式,并采用基于初猜值的有限步迭代求解算法,在推力闭环控制性能指标满足的基础上,确保了燃油控制量计算的实时性问题。
[0190]
尽管为使解释简单化将上述方法图示并描述为一系列动作,但是应理解并领会,这些方法不受动作的次序所限,因为根据一个或多个实施例,一些动作可按不同次序发生和/或与来自本文中图示和描述或本文中未图示和描述但本领域技术人员可以理解的其他动作并发地发生。
[0191]
如本技术和权利要求书中所示,除非上下文明确提示例外情形,“一”、“一个”、“一种”和/或“该”等词并非特指单数,也可包括复数。一般说来,术语“包括”与“包含”仅提示包括已明确标识的步骤和元素,而这些步骤和元素不构成一个排它性的罗列,方法或者设备也可能包含其他的步骤或元素。
[0192]
上述实施例是提供给熟悉本领域内的人员来实现或使用本发明的,熟悉本领域的
人员可在不脱离本发明的发明思想的情况下,对上述实施例做出种种修改或变化,因而本发明的保护范围并不被上述实施例所限,而应该是符合权利要求书提到的创新性特征的最大范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1