一种漂浮式全方向波浪能收集装置及方法与流程
[0001]
本发明属于波浪振动发电装置技术领域,涉及一种漂浮式全方向波浪能收集装置及方法。
背景技术:
[0002]
海洋是地球上广阔连通的水域,占据了地球表面约71%的面积,且海洋能是蕴藏在海洋中的可再生能源,包括温差能、海流能、波浪能、潮汐能等自然资源。其中波浪能在海洋中无处不在,蕴藏着丰富的能量,波浪能实质上是海洋在吸收风能后产生的动能和势能,并且常常以机械能形式存在,不受温度、天气、昼夜、季节等自然条件的影响,是一种取之不竭、易于直接利用的全天候可再生清洁能源。
[0003]
随着无线传感网检测技术的发展和海洋开发的需要,无线传感网开始大量使用在海洋平台监测、海洋生态环境及水温气象参数测量、海水盐度等指标的测量等方面。随着海洋无线传感网的研究应用日益广泛,发现能量供给问题是制约海洋无线传感网应用和发展的主要问题。无线传感网的能量供给主要通过蓄电池、太阳能、风能和波浪能等。蓄电池使用寿命受限于电池容量,而且蓄电池充电或更换操作复杂,成本高昂。太阳能和风能容易受自然环境的影响,不稳定。目前,通过收集周围环境中的能量并转换为电能是一种替代传统供电方式的有效方式。本装置通过将波浪能中的动能和势能转换为机械能,并将机械能转换为电能存储起来为传感器供电,将成为一个节能环保的新能源。
[0004]
通过调查目前的波浪振动能量收集技术,主要方法可分为电磁式、压电式、机械式和磁致伸缩式。例如公开号为中国专利申请号为202010047356.6公开的“一种全向压电电磁复合式波浪能采集装置”,为一种内部结构为底面放置线圈,四周安装环绕形立式压电片,通过摆锤全方向自由摆动作为激励方式的球形漂浮式能量采集装置,但是该装置中的电磁式收集结构较大、输出电压不高,而且压电片自身较脆,摆锤的摆动幅度不受限制往往对装置产生强烈的冲击,在海平面这种复杂的环境中适应能力差,严重影响该装置的使用寿命。对故综上可述,该装置发电效率低、环境适应能力差和寿命短。
[0005]
磁致伸缩式是基于磁致伸缩材料的性能来实现的,即磁致伸缩材料在受力或者产生应变的情况下,使材料内部磁通密度相应地发生变化,在线圈中感应电流,故将机械能先转换成磁能,再将磁能转换为电能。超磁致伸缩材料galfenol合金具有更加优异的性能,价格低廉,有着更好的延展性、高抗拉强度和耐压性,其良好的耐压性可以完美的克服pzt容易产生应力疲劳的缺点。galfenol合金材料的机电耦合系数k
33
约为0.5,而普通的压电材料pvdf的机电耦合系数k
33
约为0.1,galfenol材料的能量转化率高于pvdf材料,相对于压电材料也更灵敏,对小振幅的振动也可产生较高的电压。根据以上的研究发现,本次设计的能量收集装置采用磁致伸缩式,材料选用galfenol薄片。本装置主要针对海洋中传感网络节点能量供给难、成本高等问题,对海洋中波浪能进行转换收集,并将收集的能量储存起来为传感器进行供能,此方式是一个节能环保的好方法。
技术实现要素:
[0006]
本发明的目的是为了解决上述技术问题,提出了一种漂浮式全方向波浪能收集装置及方法。
[0007]
为实现以上技术目的,本发明采用以下技术方案:
[0008]
一种漂浮式全方向波浪能收集装置,包括重力锚与浮漂板,重力锚与浮漂板固定连接,还包括激励机构与能量收集机构,浮漂板与激励机构转动式连接,激励机构与能量收集机构转动式连接;能量收集机构包括能量收集壳体以及位于能量收集壳体内的磁铁与磁致伸缩悬臂梁;磁致伸缩悬臂梁包括磁致伸缩片与缠绕在磁致伸缩片外的感应线圈;激励机构包括波浪能转换体和伸入至能量收集壳体内的激励体;任意方向的波浪驱动波浪能转换体转动,波浪能转换体带动激励体于磁致伸缩片表面运动,使磁致伸缩片产生弯曲变形;激励体、磁铁以及磁致伸缩片相互配合,使感应线圈产生感应电动势;感应线圈通过导线与用电设备连接。
[0009]
进一步地,能量收集壳体包括底壳以及位于底壳开口端的密封罩,磁铁与底壳的周向内壁贴合连接;能量收集机构还包括安装板与以及设置于安装板顶部的压片,安装板与磁铁的周向内壁贴合连接,磁致伸缩片的头部与压片连接,尾部为自由端。
[0010]
进一步地,数个磁致伸缩片沿压片圆周方向均匀布设;能量收集机构还包括铍青铜片,铍青铜片设置于数个磁致伸缩片的尾部上表面,激励体位于铍青铜片上表面并沿铍青铜片上表面做圆周运动。
[0011]
进一步地,数个磁致伸缩片的尾部围成第一开孔,铍青铜片设有第二开孔;激励机构的顶端先后贯穿底壳的底端面、第一开孔以及第二开孔。
[0012]
进一步地,磁致伸缩片为galfenol合金材料。
[0013]
进一步地,激励机构还包括转动杆;转动杆的底部与浮漂板转动式连接,顶部先后贯穿底壳的底端面、第一开孔以及第二开孔;转动杆与底壳的底端面转动式连接。
[0014]
进一步地,激励体为激励小球,设置于转动杆的顶部;激励小球与转动杆之间连接有第一连接杆;转动杆沿其周向还设有数个第二连接杆,第二连接杆位于浮漂板与底壳的底端面之间;第二连接杆远离转动杆的一端与漂浮球连接。
[0015]
进一步地,转动杆外套设有第一滚动轴承与第二滚动轴承,第二滚动轴承位于转动杆的底部,第一滚动轴承位于第一连接杆与第二连接杆之间,第二连接杆位于第一滚动轴承与第二滚动轴承之间;底壳的底端面套设于第一滚动轴承外,转动杆通过第一滚动轴承与底壳的底端面转动式连接;浮漂板套设于第二滚动轴承外,转动杆通过第二滚动轴承与浮漂板转动式连接。
[0016]
进一步地,重力锚包括底座与位于底座开口端的密封盖;密封盖设有支撑杆与走线孔,支撑杆与浮漂板连接;支撑杆设有固定杆,固定杆远离支撑杆的一端与岸边或海水中的固定物体连接;用电设备为蓄电池,蓄电池位于底座内,底座内还设有电路转换卡,感应线圈连接的导线贯穿走线孔后与电路转换卡连接,电路转换卡通过导线与蓄电池连接。
[0017]
本发明还提供一种漂浮式全方向波浪能收集方法,包括以下步骤,
[0018]
s1:将重力锚的密封盖与底座密封固定;
[0019]
s2:将密封盖的支撑杆与浮漂板连接固定;
[0020]
s3:将第一滚动轴承与第二滚动轴承套设于转动杆外,使浮漂板套设于第二滚动
轴承外;使转动杆的顶部伸入底壳内,并使底壳的底端套设于第一滚动轴承外;安装好第一连接杆、激励小球、第二连接杆以及浮漂球,使激励小球能够在铍青铜片表面做圆周运动,并使磁致伸缩片产生弯曲变形;
[0021]
s4:将磁致伸缩片外缠绕的感应线圈通过导线与用电设备连接;将密封罩与底壳密封固定;
[0022]
s5:将连接完毕的重力锚、浮漂板、激励机构以及能量收集机构整体漂浮于海平面,并通过固定杆对漂浮位置进行限制;
[0023]
s6:波浪驱动浮漂球、转动杆以及激励小球整体转动,激励小球于铍青铜片表面做圆周运动,激励小球圆周运动对能量收集装置的磁致伸缩悬臂梁施加压力,使磁致伸缩片产生弯曲变形;激励体、磁铁以及磁致伸缩片相互配合,使感应线圈产生感应电动势。
[0024]
与现有技术相比,本发明的有益技术效果为:
[0025]
(1)本发明通过激励机构转动,能够对全方向的波浪能进行转换与收集;同时通过激励机构的激励体于磁致伸缩片表面运动,对磁致伸缩片表施加激励,避免了正面对磁致伸缩悬臂梁的刚性冲击力;
[0026]
(2)本发明基于磁致伸缩式能量收集技术,并且磁致伸缩片采用galfenol合金材料,相比于压电式和电磁式,具有良好的耐压性和抗疲劳性、机电耦合系数高、寿命长、能量转换效率高;
[0027]
(3)本发明通过重力锚、漂浮板和激励机构当中的漂浮球增加了在海平面上更高的稳定性;
[0028]
(4)本发明结构简单、安装方便、使用范围广,可以将其放置在堤壁附近水域和海平面的任意位置。
附图说明
[0029]
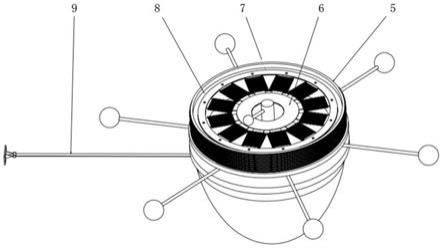
图1为本实施例漂浮式全方向波浪能收集装置的整体装配示意图;
[0030]
图2为本实施例漂浮式全方向波浪能收集装置的内部装配示意图;
[0031]
图3为本实施例能量收集机构的装配示意图;
[0032]
图4为本实施例磁致伸缩悬臂梁装配示意图;
[0033]
图5为本实施例激励机构的装配示意图;
[0034]
图6为本实施例重力锚的底座示意图;
[0035]
图7为本实施例重力锚的密封盖示意图。
[0036]
图中,1为重力锚、1-1为底座、1-2为卡槽、1-3为蓄电池、1-4为支撑杆、1-5为走线孔、1-6为密封盖、2为浮漂板、3为激励机构、3-1为第一滚动轴承、3-2为转动杆、3-3为第二滚动轴承、3-4为激励小球、3-5为漂浮球、3-6为第二连接杆、3-7为第一连接杆、4为密封罩、5为底壳、6为铍青铜片、7为能量收集机构、7-1为磁致伸缩悬臂梁、7-2为压片、7-3为安装板、7-4为第一螺纹孔、7-1-1为磁致伸缩片、7-1-2为第二螺纹孔、7-1-3为感应线圈;8为磁铁、9为固定杆。
具体实施方式
[0037]
下面结合具体实施例对本发明进行进一步地描述,但本发明的保护范围并不仅仅
限于此。
[0038]
如图1-7所示,本实施例一种漂浮式全方向波浪能收集装置,包括重力锚1、浮漂板2、激励机构3以及能量收集机构7。重力锚1与浮漂板2固定连接,浮漂板2与激励机构3转动式连接,激励机构3与能量收集机构转动式连接。能量收集机构7包括能量收集壳体以及位于能量收集壳体内的磁铁8与磁致伸缩悬臂梁7-1。磁致伸缩悬臂梁7-1包括磁致伸缩片7-1-1与均匀缠绕在磁致伸缩片7-1-1外的感应线圈7-1-3。激励机构3包括波浪能转换体和伸入至能量收集壳体内的激励体。波浪驱动激励机构3的波浪能转换体转动,波浪能转换体转动将会带动激励体于磁致伸缩片7-1-1表面运动,使磁致伸缩片7-1-1产生弯曲变形。激励体、磁铁8以及磁致伸缩片7-1-1相互配合,使感应线圈7-1-3产生感应电动势。感应线圈7-1-3通过导线与蓄电池1-3连接,将波浪能转换成的电能储存于蓄电池1-3内,即完成从波浪能到机械能再到电能的转换。使用时可以将本实施例任意的漂浮在海平面上,也可以将其漂浮在大型浮标附近,然后以绳索的连接方式连接在海面上的浮标上。也可以将其分布式的漂浮在岸边的堤壁上附近,通过在堤壁上安装膨胀栓,将本实施例通过岸边固定杆9以螺母的连接方式固定在堤壁上。本实施例通过对波浪能的转换与收集能够为海洋中监测传感器或岸边指示灯进行供能。
[0039]
当风吹拂水面和轮船经过时都会引起水平面产生波浪,任意方向波浪中的动能和势能会推动激励机构3的波浪能转换体转动,波浪能转换体的转动会带动其上的激励体做圆周运动,对全方向的波浪能进行转换与收集。激励体做圆周运动时会对能量收集装置中的悬臂梁施压压力,使磁致伸缩片7-1-1产生一定的弯曲变形,避免了正面对磁致伸缩悬臂梁7-1的刚性冲击力。悬臂梁在导磁外壳中的永久磁铁8产生的偏置磁场的作用下,当受到应力自身发生弯曲变形时,根据磁致伸缩材料的villari效应,材料应力状态的改变会引起材料感应强度的变化,此时缠绕在磁致伸缩片7-1-1片上的感应线圈7-1-3内的磁通量会发生改变。根据法拉第电磁感应定律,变化的磁感应强度会在感应线圈7-1-3中会产生感应电动势,从而实现从波浪能到机械能再到电能的转换。转换的电能可以储存在蓄电池1-3内,或者为无线传感器供电或其它的元件供能。
[0040]
如图2-4所示,能量收集机构7中,将感应线圈7-1-3直接缠绕在磁致伸缩片7-1-1上,这样可以降低磁致伸缩片7-1-1与拾取线圈间的空隙减少能量损失。能量收集机构7中的能量收集壳体包括底壳5以及位于底壳5开口端的密封罩4,底壳5与密封罩4之间通过螺纹的连接方式进行连接固定,并通过密封圈进行密封。磁铁8位于底壳5内部并为圆环形,圆环形的磁铁8通过磁力粘结的方式与底壳5的周向内壁贴合连接。为便于固定磁致伸缩悬臂梁7-1,能量收集机构7机构还包括安装板7-3与以及设置于安装板7-3顶部的压片7-2。安装板7-3与压片7-2均为环形且均位于底壳5内,其中,安装板7-3与磁铁8的周向内壁贴合连接,压片7-2朝底壳5中心凸出。磁致伸缩片7-1-1位于环形安装板7-3与环形的压片7-2之间,其中,磁致伸缩片7-1-1的头部通过螺栓的连接方式与压片7-2连接,尾部为自由端。压片7-2设有与磁致伸缩片7-1-1连接的第一螺纹孔7-4,磁致伸缩片7-1-1的头部设有第二螺纹孔7-1-2。
[0041]
数个磁致伸缩片7-1-1沿压片7-2圆周方向均匀布设。能量收集机构7机构还包括铍青铜片6,铍青铜片6设置于数个磁致伸缩片7-1-1的尾部上表面并通过环氧树脂进行连接固定。激励体位于铍青铜片6上表面并沿铍青铜片6上表面做圆周运动。数个磁致伸缩片
7-1-1的尾部围成第一开孔,铍青铜片6设有第二开孔。激励机构3的顶端先后贯穿底壳5的底端面、第一开孔以及第二开孔。本实施例将十二个磁致伸缩悬臂梁7-1分别放置于环形的安装板7-3与环形的压片7-2之间的圆周上。
[0042]
如图5所示,波浪能转换体包括转动杆3-2。转动杆3-2的底部与浮漂板2转动式连接,顶部先后贯穿底壳5的底端面、第一开孔以及第二开孔。转动杆3-2与底壳5的底端面转动式连接。激励体为激励小球3-4,设置于转动杆3-2的顶部。激励小球3-4与转动杆3-2之间连接有第一连接杆3-7。转动杆3-2沿其周向均匀设有数个第二连接杆3-6,第二连接杆3-6位于浮漂板2与底壳5的底端面之间。第二连接杆3-6远离转动杆3-2的一端与漂浮球3-5连接。激励小球3-4与第一连接杆3-7之间通过螺纹连接的方式进行连接固定以方便进行拆卸,第一连接杆3-7与转动杆3-2之间通过螺纹连接的方式进行连接固定以方便进行拆卸。漂浮球3-5与第二连接杆3-6通过螺纹连接方式进行连接固定以方便进行拆卸,第二连接杆3-6与转动杆3-2之间通过螺纹连接的方式进行连接固定以方便进行拆卸。本实施例共设置六个漂浮球3-5与六个第二连接杆3-6,转动杆3-2壁面沿圆周方向设有与第二连接杆3-6相适配的六个螺纹孔。
[0043]
转动杆3-2外套设有第一滚动轴承3-1与第二滚动轴承3-3,第二滚动轴承3-3位于转动杆3-2的底部,第一滚动轴承3-1位于第一连接杆3-7与第二连接杆3-6之间,第二连接杆3-6位于第一滚动轴承3-1与第二滚动轴承3-3之间。底壳5的底端面套设于第一滚动轴承3-1外,转动杆3-2通过第一滚动轴承3-1与底壳5的底端面转动式连接。浮漂板2套设于第二滚动轴承3-3外,转动杆3-2通过第二滚动轴承3-3与浮漂板2转动式连接。第一滚动轴承3-1的内圈通过过盈配合的连接方式固定在转动杆3-2上,外圈与底壳5端面的轴承孔通过过盈配合的方式进行连接固定。第二滚动轴承3-3的内圈通过过盈配合的连接方式固定在转动杆3-2上,外圈与漂浮板上的轴承孔通过过盈配合的方式进行连接固定。
[0044]
如图6、图7所示,重力锚1包括底座1-1与位于底座1-1开口端的密封盖1-6,底座1-1与密封盖1-6之间通过过渡配合的连接方式进行连接固定,并通过双层密封条进行密封。密封盖1-6设有支撑杆1-4与走线孔1-5,支撑杆1-4与浮漂板2以螺纹连接的方式进行连接固定,方便拆卸。支撑杆1-4设有固定杆9,固定杆9远离支撑杆1-4的一端与岸边或海水中的固定物体连接。支撑杆1-4上也可设置固定绳,固定绳远离支撑杆1-4的一端与岸边或海水中的固定物体连接。用电设备为蓄电池1-3,蓄电池1-3位于底座1-1内。底座1-1内还设有电路转换卡,感应线圈7-1-3连接的导线贯穿走线孔1-5后与电路转换卡连接,电路转换卡装换的稳定电流通过导线与蓄电池1-3的正负极相连接。底座1-1内还设有用于放置蓄电池1-3的卡槽1-2。电路转换卡装换的稳定电流也可与其他类型的用电设备连接。
[0045]
对应于上述漂浮式全方向波浪能收集装置,本实施例还提供一种漂浮式全方向波浪能收集收集方法,包括以下步骤,
[0046]
s1:将重力锚的密封盖与底座密封固定;
[0047]
s2:将密封盖的支撑杆与浮漂板连接固定;
[0048]
s3:将第一滚动轴承与第二滚动轴承套设于转动杆外,使浮漂板套设于第二滚动轴承外;使转动杆的顶部伸入底壳内,并使底壳的底端套设于第一滚动轴承外;安装好第一连接杆、激励小球、第二连接杆以及浮漂球,使激励小球能够在铍青铜片表面做圆周运动,并使磁致伸缩片产生弯曲变形;
[0049]
s4:将磁致伸缩片外缠绕的感应线圈通过导线与用电设备连接;将密封罩与底壳密封固定;
[0050]
s5:将连接完毕的重力锚、浮漂板、激励机构以及能量收集机构整体漂浮于海平面,并通过固定机构对漂浮位置进行限制;
[0051]
s6:波浪驱动浮漂球、转动杆以及激励小球整体转动,激励小球于铍青铜片表面做圆周运动,激励小球圆周运动对能量收集装置的磁致伸缩悬臂梁施加压力,使磁致伸缩片产生弯曲变形;激励体、磁铁以及磁致伸缩片相互配合,使感应线圈产生感应电动势。
[0052]
步骤s4当中的用电设备可以为底座内放置的蓄电池。步骤s5当中的固定机构可以为密封盖的支撑杆上设置的连接杆或连接绳。当波浪冲击漂浮球时,漂浮球将带动激励机构旋转,当激励机构旋转时,会带动其上面的激励小球做圆周运动,从而激励小球会对能量收集机构中的磁致伸缩悬臂梁产生一定的压力,进而使磁致伸缩悬臂梁弯曲变形,从而能量收集机构会将机械能转换为电能,实现能量的转换。
[0053]
以上对本发明的实施例进行了详细说明,对本领域的普通技术人员而言,依据本发明提供的思想,在具体实施方式上会有改变之处,而这些改变也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1