来自风力涡轮机系统的快速频率支持
1.本发明涉及风力涡轮机系统,具体地涉及由风力涡轮机系统实现的快速频率支持方法。
背景技术:
2.在电网中,由风力涡轮机系统产生的电力的比例(即,风功率渗透(wind power penetration)水平)正在增加。因此,风力涡轮机系统(wts)正被设计为提供惯性和频率响应以帮助调节电网的频率。例如,当电网中的一个或多个发电机停止工作时,电网的频率会受到扰动。
3.常规地,风力涡轮机利用快速频率响应方法来帮助调节电网的频率。在这种方法中,来自旋转风力涡轮机的惯性能量用于向电网提供功率增加,以便阻止和限制在频率扰动事件之后直接发生的频率变化。现有的系统和方法在紧接这种频率扰动事件之后的时间期间不期望地导致电网中的第一频率和第二频率“骤降”(dip)。第一频率骤降也被称为频率最低点。
4.此外,常规方法不能很好地适用于在不同风速和风功率渗透水平下的操作。具体地,现有频率支持方法的性能在各种风速和风功率渗透水平下不利地变化。
5.本发明旨在提供一种改进的快速频率支持方法。
技术实现要素:
6.根据本发明的第一方面,提供了一种用于控制连接到电网的风力涡轮机系统的方法。该方法包括:基于功率控制基准产生用于控制风力涡轮机的功率输出的风力涡轮机控制信号;监测电网的电频率;以及响应于检测到电网中的频率变化,激活快速频率支持方法。该快速频率支持方法包括调整功率控制基准(也被称为功率基准因子)以导致风力涡轮机的功率生产过剩,该功率生产过剩导致风力涡轮机的惯性动能转换为电能。通过将自适应增益函数应用于电网频率与标称水平的差异的测量来确定功率控制基准。
7.自适应增益通过使增益的值能够基于外部因素而变化来改善快速频率支持方法的性能,如下面将讨论的。降低了由频率扰动导致的电网频率的下降和频率的变化率。此外,避免了不期望的频率第二骤降。提高了电力系统的频率安全性。
8.可选地,功率控制基准调整导致足够的功率生产过剩以防止电网频率降低到预定的稳定频率(settling frequency)以下。进一步可选地,减小了频率的变化率。通常,在电网操作的大部分时间期间,电网可容许稳定频率。稳定频率被视为是电网在此频率处“稳定”的可接受的频率,即,在频率扰动之后,电网可以在此频率处持续操作一段延长的时段而没有任何不利后果。
9.使用功率控制基准调整实现的电网稳定频率通常有利地仅略低于(例如,在0.01hz以内)使用常规方法实现的稳定频率。
10.这是电网频率可以偏离标称值的典型最大量。通过将频率维持在该边界范围内,
在快速频率支持方法期间不需要风力涡轮机转子的旋转返回到最佳水平。替代地,风力涡轮机转子可以在快速频率支持方法完成之后并且由于通过接合电网中的其他“较慢”发电机而升高的频率而返回到最佳速度。
11.可选地,自适应增益函数至少部分地基于风力涡轮机转子的实时速度的测量。
12.在较高的风速下,风功率输出与系统的总发电量的比率较高。这意味着,如果风力涡轮机系统不提供快速频率支持,则对于同一频率事件存在更大的频率下降,并且对于每个wts需要更多的能量生产过剩来阻止频率变化。因此,在风速较高时,自适应增益会导致从风力涡轮机转子释放出更多的惯性动能(必定存在更高的功率控制基准)。
13.在风速较低时,转子中存储的动能较少,因此,自适应增益将是可接受的,其将不会导致转子速度的过度减速和潜在的大量风功率捕获的损失。
14.在一些情况下,使用恒定增益的常规系统可能会导致转子速度的不断下降,因为即使当不需要频率支持时增益也被维持在高水平。在所公开的系统中,自适应增益可以随转子速度逐渐地减小,从而降低频率支持的水平并且避免转子速度持续下降的现象。
15.可选地,自适应增益函数至少部分地基于预定义的最大转子速度和最小转子速度之一或两者。优选地,自适应增益函数部分地基于预定义的最小转子速度。
16.随着转子速度在频率支持方法期间降低,频率支持能力将减小。如果转子速度降低到接近最小转子速度的水平,则有利的是不存在来自风力涡轮机的功率生产过剩以确保风力涡轮机转子速度不降低到最小转子速度以下。
17.可选地,自适应增益函数至少部分地基于取决于电网中由风力涡轮机产生的功率的比例的风功率渗透水平。
18.当存在较高的风功率渗透水平时,更多的风力涡轮机系统参与频率支持方法,并且对每个风力涡轮机系统的功率生产过剩的需求更少。此外,总的惯性动能损失大于如果相同的增益用于较低的风功率渗透水平的情况。
19.可选地,自适应增益函数至少部分地基于一个或多个系统操作条件。
20.可选地,系统操作条件取决于电网的一个或多个特性,所述特性包括快速响应能量存储、hvdc链路、光伏和基于电力电子的负载(例如,连接到电网的停放电动车辆)的利用中的一个或多个。
21.如果系统包括能够实现快速频率响应的组件,则可以降低对由风力涡轮机系统提供快速频率支持的需求,并且降低了来自风力涡轮机系统的不必要的功率生产过剩的风险。
22.可选地,快速频率响应方法还包括辅助控制方法,其中通过调整连接到电网的附加发电机的控制参数并且可选地使风力涡轮机的惯性动能返回到最佳水平来将电网的频率调节到标称频率,而不从电网吸收功率。
23.可选地,将电网的频率调节到标称频率的死区(deadband)内。
24.可选地,如果在快速频率支持方法期间转子速度降低到最佳水平以下,则调整附加发电机的控制参数。
25.避免从电网吸收功率意味着避免了在频率扰动事件之后的频率的第二骤降。
26.可选地,附加地基于最大功率点跟踪功率值来确定功率控制基准。优选地,功率控制基准从不小于最大功率点跟踪功率值。风力涡轮机转子通常以最大功率点跟踪值操作,
并且该条件确保了风力涡轮机系统在最大功率点跟踪操作与生产过剩(频率支持操作)之间无缝切换。
27.可选地,使用电网形成原理来控制风力涡轮机系统,其中系统的功率转换器被配置为在风力涡轮机系统的端子处创建电压频率。在示例中,功率转换器可以在没有同步发电机的情况下工作。
28.根据本发明的第二方面,提供了一种风力涡轮机系统,包括:风力涡轮机和控制器。该控制器被配置为基于功率控制基准产生用于控制风力涡轮机的功率输出的风力涡轮机控制信号。控制器还被配置为响应于检测到电网中的频率变化,调整功率控制基准以导致风力涡轮机的功率生产过剩。该功率生产过剩导致风力涡轮机的惯性动能转换为电能。通过将自适应增益函数应用于电网频率与标称水平的差异的测量来确定功率控制基准。
29.可选地,功率控制基准导致足够的功率生产过剩以防止电网频率降低到预定的稳定频率以下。通常,在电网操作的大部分时间期间,电网可容许稳定频率。
30.可选地,控制器被配置为接收转子的实时速度的测量以用于输入到自适应增益函数。
31.可选地,自适应增益函数至少部分地基于预定义的最大转子速度和最小转子速度之一或两者。优选地,自适应增益函数至少部分地基于预定义的最小转子速度。
32.可选地,自适应增益函数至少部分地基于取决于电网中由风力涡轮机产生的功率的比例的风功率渗透水平。
33.可选地,自适应增益函数至少部分地基于一个或多个系统操作条件。
34.可选地,系统操作条件取决于电网的一个或多个特性,所述特性包括快速响应能量存储、hvdc链路、光伏和基于电力电子的负载的利用中的一个或多个。
35.可选地,发电机是双馈感应发电机。
36.可选地,发电机是永磁同步发电机。
37.可选地,风力涡轮机系统还包括连接在发电机和电网之间的功率转换器,其中控制器通过向功率转换器发送风力涡轮机控制信号来控制风力涡轮机发电机的功率输出,并且功率转换器基于控制信号改变发电机上的电负载。
38.可选地,控制器被配置为基于最大功率点跟踪功率值调整功率控制基准。
39.可选地,使用电网形成原理来控制风力涡轮机系统,其中系统的功率转换器被配置为在风力涡轮机系统的端子处创建电压频率。在示例中,功率转换器可以在没有同步发电机的情况下工作。
40.在电网形成控制中,转换器在风力涡轮机系统处形成其自身的电压频率以确保自同步,从而固有地支持电网的稳定性。在也与本公开的各方面兼容的电网跟随控制期间,转换器不在风力涡轮机系统端子处施加电压频率,而是通过使用锁相环(pll)或类似组件测量端子电压的频率来跟随电网频率。
41.以下示例与包括如上所述的方法或风力涡轮机系统的方面相关。
42.在示例中,使用转换器内的锁相环组件或类似组件和/或使用转换器的所产生的虚拟频率来监测电网的电频率。通常,转换器被配置为将来自风力涡轮机的电输出转换到电网和/或是连接在风力涡轮机和电网之间的功率转换器。在不需要多个风力涡轮机系统之间的通信的情况下有利地监测电网的电频率。
43.在示例中,调整功率控制基准(或功率基准因子)导致风力涡轮机的立即且足够的功率生产过剩以防止电网频率降低到稳定频率以下,而没有频率过冲和振荡(或仅具有可忽略的频率过冲和振荡)。换句话说,将电网频率最低点(如将在下面讨论的)阻止为接近或在稳定频率内。
44.在示例中,功率生产过剩在风速低于额定值时导致来自风力涡轮机的惯性动能的转换和/或在风速高于额定值时导致来自风的所捕获风功率。
45.在示例中,如上所述的“应用自适应增益函数”是“将自适应增益函数添加”到最大功率点跟踪控制的原始功率基准以获得功率控制基准。可选地,附加地基于原始功率基准来确定功率控制基准。
46.在示例中,如果风力涡轮机的转子速度在快速频率支持期间(优选地在主要控制方法期间)降低,则不使其返回到最佳水平以便在主要频率控制时段期间不需要从电网吸收额外功率。如果存在辅助控制方法,则通常主要控制方法发生在辅助控制方法之前。
47.在示例中,由功率控制基准(功率基准因子)除以转子速度产生的转矩基准在风力涡轮机系统的任何机械极限范围内。
附图说明
48.图1示出了本文所述的快速频率支持方法的频率响应曲线。
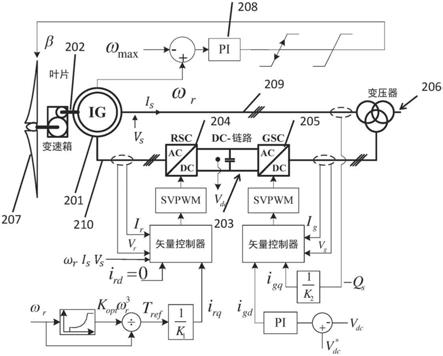
49.图2是用于实现本文所述的方法的风力涡轮机系统的示意图。
50.图3是常规快速频率支持方法的框图。
51.图4是本文公开的有利的快速频率支持方法的框图。
52.图5是示出风力涡轮机转子的功率输出与转速之间的关系的曲线图。
53.图6示出了论证所公开的有利的快速频率支持方法的优点的模拟结果的曲线图。
54.图7是使用基于双馈感应发电机(dfig)的风力涡轮机系统和电网跟随控制原理实现的有利的快速频率支持方法的框图。
55.图8是使用基于双馈感应发电机(dfig)的风力涡轮机系统和电网形成控制原理实现的有利的快速频率支持方法的框图。
56.图9是使用基于永磁同步电机发电机(pmsg)的风力涡轮机系统和电网跟随控制原理实现的有利的快速频率支持方法的框图。
57.图10是使用基于永磁同步电机发电机(pmsg)的风力涡轮机系统和电网形成控制原理实现的有利的快速频率支持方法的框图。
58.图11a和图11b是示出论证所公开的使用基于pmsg的风力涡轮机系统和电网跟随控制原理的有利的快速频率支持方法的优点的模拟结果的曲线图。
59.图12a和图12b是示出论证所公开的使用基于pmsg的风力涡轮机系统和电网形成控制原理的有利的快速频率支持方法的优点的模拟结果的曲线图。
具体实施方式
60.本说明书首先讨论传统的“第一”快速频率支持方法以便帮助说明所公开的第二更有利的快速频率支持方法。这些方法用于在电网中发生频率扰动之后立即支持电网的频率。还公开了一种用于实现这些方法的风力涡轮机系统。
61.图1示出了所公开的快速频率支持方法的效果。图1是示出在通常持续若干秒的进程的主要频率控制时段期间的电网频率随时间的变化的曲线图。
62.在正常操作条件下,电网的频率维持在标称系统频率,例如在欧洲是50hz或在北美是60hz。当时间t对应于所示频率曲线上指示的点101时,发生频率事件。在所示的示例中,频率事件是电网频率的突然降低。这通常是由电网上的负载增加导致的,例如由电力需求的突然增加和/或电网中的发电机离线导致的。频率的降低由频率曲线102、103和104示出,每条频率曲线示出了不同条件下的频率响应。
63.在第一实例中,频率曲线102示出了针对具有低风功率渗透水平的电网而发生的频率响应,例如,其中仅20%的电力由风力涡轮机系统产生。在这种情况下,使用第一快速频率支持方法。最初,频率下降到所谓的频率最低点105。如本文所使用的,术语“频率最低点”涉及在频率扰动之后出现的频率曲线的最低点。从风力涡轮机系统释放出的惯性动能导致阻止在频率最低点处的频率下降。风力涡轮机的转子通过从转子释放出惯性动能而减速,从而使得功率“生产过剩”功率,该功率被馈送到电网中以支持频率。
64.风力涡轮机系统通常以其效率最高的最大功率点跟踪(mppt)点操作。在mppt点,风力涡轮机系统的转子以最佳速度旋转。在第一频率支持方法中,风力涡轮机系统的转子的速度在若干秒的功率生产过剩之后恢复到mppt点水平。该恢复过程从电网吸收功率。风力涡轮机系统的该功率吸收导致电网中所谓的频率第二骤降(fsd),如附图标记106所示。
65.在第二实例中,虚曲线103示出了针对具有高风功率渗透水平(例如,50%的电力由风力涡轮机系统产生)的电网并且当利用与第一方法中相同的第一快速频率响应方法时发生的频率响应。类似于第一实例,存在频率最低点105。通过从风力涡轮机系统释放出惯性动能,频率下降被阻止在频率最低点105处。
66.在第二实例中,风力涡轮机系统的转子的速度在若干秒的功率生产过剩之后恢复到mppt水平以支持频率的调节,从而从电网吸收功率。可以观察到,由此产生的fsd 106是显著的并且远大于第一实例的fsd 106。这是因为将风力涡轮机系统的转子恢复到mppt水平需要从电网吸收显著更多的能量。导致这种现象的原因是风力涡轮机系统为电网发电的比例显著更大。
67.从图1中可以观察到,频率曲线102和103都示出了频率第二骤降106。曲线103的频率第二骤降106在风功率渗透水平更大的第二情况下显著更大。
68.如果释放出大量惯性动能以支持电网频率并且用于将转子恢复到mppt水平的时间短,则将会发生大的fsd。使用常规方法,为了避免大的fsd,对释放出的动能进行限制,其进而限制了可用的频率支持水平。
69.在第三实例中,频率响应曲线104示出了针对具有高风功率渗透水平的电网并且当利用如本文所公开的更有利的第二快速频率响应方法时发生的频率响应。频率最低点105与第一实例和第二实例相比大大减小并且在所谓的“稳定频率”107内。如下面将讨论的,这是由于第二快速频率支持方法的特征所致,例如通过利用动态增益函数来增加从风力涡轮机系统释放出的动能的量。
70.在第三实例中不存在fsd,因为没有从电网吸收能量来使风力涡轮机转子返回到mppt水平。风力涡轮机在主要频率响应时段期间不恢复到mppt水平。稳定频率在电网频率变化的可允许的容限范围内,因此,对频率而言,在相当长的时间量内保持接近稳定频率是
可接受的。在辅助频率响应时段期间(例如,在若干分钟的进程上)将频率逐渐调节到系统频率,例如通过增加连接到电网的同步发电机的发电功率以支持频率。在辅助频率控制时段期间,风力涡轮机系统的转子速度将随频率自动地恢复。
71.在第三实例中,大大改善了电网的频率安全性。此外,所公开的快速频率响应方法可以集成到现有的风力涡轮机控制系统中。
72.下面参考实现该方法的基于双馈感应发电机(dfig)的风力涡轮机系统来说明所公开的快速频率响应方法。所公开的快速频率响应方法还可以使用其他类型的风力涡轮机系统来实现,例如基于永磁同步发电机的风力涡轮机系统。本文公开的方法可以使用各种类型的变速风力涡轮机系统来实现,例如利用鼠笼式感应发电机或绕线转子同步发电机。
73.参考图2来说明用于实现所公开的快速频率控制方法的示例dfig系统。
74.基于dfig的风力涡轮机系统的发电机201具有两项输入,即:a)经由转子输入端202的来自风力涡轮机的转子207的功率;以及b)经由转子侧转换器输入端210的具有可变频率和相位的ac输入功率。使用转换器203控制ac输入功率以调整涡轮机的转速,从而补偿由环境(例如,阵风)导致的涡轮机速度的改变或实现下文所述的方法。通常,风力涡轮机的转速维持在最佳操作点(即,mppt水平)。功率经由线路209从发电机201输出到电网。
75.转换器203包括通过dc链路连接的转子侧转换器(rsc)204和电网侧转换器(gsc)205。rsc和gsc将来自电网206的输入市电功率转换为用于输入到dfig发电机201的期望功率水平以确保风力涡轮机转子207的转速维持在最大功率点跟踪(mppt)水平。这被称为mppt控制。这是用于根据条件(尤其是风速和转子的大小)最高效地进行发电的转子的最佳转速。rsc 204用于控制dfig发生器201的ac功率输入。gsc 205稳定rsc 204和gsc 205之间的dc链路电压。gsc 205还确保向电网206输出零无功功率。
76.俯仰角控制器208用于在风速高于最大值时通过控制转子叶片的俯仰来限制转子速度。
77.在图2所示的系统中标识了以下变量。
78.ir是在转子侧测量的电流。
[0079]vr
是在转子侧测量的电压(这是矢量控制器的可选输入)。
[0080]vs
、is是在定子侧测量的电压和电流。
[0081]
ig是在电网侧测量的电流。
[0082]vg
是在电网侧测量的电压。
[0083]vdc
分别是dc链路电压基准和测量值。
[0084]
β是转子叶片的俯仰角。
[0085]
ω
rmax
、ωr分别是最大和实时转子速度。
[0086]qs
是定子侧的输出无功功率。
[0087]
k1、k2是常数。
[0088]
风力涡轮机从风中捕获的机械功率pm由下式给出:
[0089][0090]
其中,ρ、r、vw、c
ρ
、β和λ分别是空气密度、风力涡轮机转子半径、风速、功率系数(风
力涡轮机产生的实际电功率除以由特定风速吹的风提供的总风功率的比率)、转子的俯仰角和叶尖速度比(转子叶片的叶尖的切向速度与实际风速之间的比率)。(1)中的c
ρ
(λ,β)使用下式来计算:
[0091][0092]
其中,
[0093]
在mppt条件下产生的功率(p
mppt
)通过以下等式来确定:
[0094][0095]
其中,λ
cpt
是λ的最佳值,c
ρmax
表示当β=0
°
且λ=λ
opt
时c
ρ
(λ,β)的最大值。k
opt
是最佳系数。
[0096]
因此,为了在mppt条件下操作,转换器203必须基于叶尖速度比λ来调节dfig发电机201的转速。
[0097]
p
mppt
、pm和ωr之间的关系在图5中可见。曲线501表示针对不同风速的p
mppt
,曲线502表示针对特定风速的pm(机械功率输出)。通常,当风速变化时,曲线502将做出调整。当转子的转速ωr处于pm曲线502的顶点(点503)时,在mppt点处产生功率。如可以观察到的,转子角速度ωr的降低导致产生的功率离开p
mppt
降低到例如点504。下面将讨论参考曲线505的在所公开的频率支持方法期间的功率输出变化。
[0098]
俯仰角控制器208改变叶片的俯仰以确保不超过最大额定转子角速度。
[0099]
已经描述了用于实现这些方法的dfig系统,现在时论将通常提供根据图1的频率响应曲线102的频率响应的不太有利的第一快速频率支持方法。
[0100]
参考图3,示出了由控制器承担的方法的流程图。控制器被配置为执行提供例如图1中的103的频率响应曲线的不太有利的第一快速频率支持方法。控制器向转子侧转换器204提供输出,从而控制dfig发电机201的ac功率输入并且调节风力涡轮机转子的转速。
[0101]
控制方法取f
sys
、f
nom
、ωr的输入,其分别是实时电网频率、标称(期望)电网频率和实时转子速度。f
sys
与f
nom
之间的差是δf。控制方法的输出是p
ref
,即,风力涡轮机根据频率控制方法应当产生的功率控制基准。p
ref
的增加导致功率转换器增加放置在发电机的输出上的电负载,从而在风力涡轮机的转子207的轴处提供增加的转矩。增加的转矩导致转子207的ωr降低,使得存储在转子207的旋转质量中的惯性动能被提取为电能。
[0102]
通常,当风力涡轮机系统在mppt条件下操作时,p
ref
=p
mppt
。p
ref
被输出给转子侧转换器,使得将适当的功率输入馈送到dfig发电机201以便根据频率控制方法来控制风力涡轮机叶片的旋转。例如,当检测到导致δf的频率扰动时,将p
ref
增加到p
mppt
以上,从而使用dfig从风力涡轮机系统释放出惯性动能,由此导致转子减速。
[0103]
图3的控制方法可以概括如下。存在两个环路:df/dt环路301和δf环路302。
[0104]
在δf环路302期间,在步骤303处取得f
sys
与f
nom
之间的差以提供δf分量,该δf分量在步骤304处被处理并且被最终添加到k
opt
ω
r3
以便提供p
ref
输出。当电网中存在频率扰动时导致δf分量。
[0105]
死区305去除低于阈值的任何δf值以便去除噪声。冲刷(washout)组件306消除δf的dc分量。实际上,冲刷组件306在一段时间内稳定地减小δf,这意味着输出p
ref
逐渐返回到等于p
mppt
(因为δf被减小到零)。
[0106]kp
是固定增益常数并且被施加以便增加δf的值以在频率扰动事件之后增加p
ref
。
[0107]
在df/dt环路301期间,固定增益kd被施加到f
sys
的微分。随后,从δf环路中减去f
sys
的微分。因此,调整p
ref
以减小频率变化率(rocof),该频率变化率对应于紧接频率扰动之后的频率响应曲线的最初梯度。
[0108]
综上所述,固定增益kd和k
p
用于通过使得从风力涡轮机转子释放出惯性动能而在电网中的频率扰动之后立即分别改善rocof和频率最低点。这是一种功率生产过剩并且导致转子减速。冲刷元件随时间减小δf分量并且通过从电网吸收功率来使风力涡轮机转子返回到mppt操作点(即,加速)。
[0109]
本发明人已经认识到由图3所示的控制方法实现的频率支持方法的若干个缺点。
[0110]
首先,由于冲刷组件305,转子速度将恢复到mppt水平。换句话说,由于冲刷组件所导致的p
ref
返回到p
mppt
,转子速度将加快。因此,功率转换器203从电网向dfig发电机201输送功率以实现转子速度恢复。这导致如图1所示的频率第二骤降106。
[0111]
其次,当存在变化的风速和风功率渗透水平时,固定增益k
p
和kd是不合适的。例如,随着更多的风力涡轮机系统被添加到电网,风功率渗透水平可能增加。固定增益是不合适的,因为来自风力涡轮机的可释放惯性动能随风速而变化,并且针对不同的风功率渗透水平所需的频率支持水平是不同的。
[0112]
现在参考图4描述产生如图1所示的频率响应曲线104的第二(有利的)频率支持方法。
[0113]
第二频率支持方法的目的是:
[0114]
i)消除频率第二骤降;
[0115]
ii)最大化动能的释放以将频率最低点提高到接近或等于稳定频率和/或充分降低频率变化率(rocof);
[0116]
iii)确保在中风速和高风速以及不同的风功率渗透水平下频率最低点的类似改善;
[0117]
iv)确保风力涡轮机系统在所有风力和系统条件下的稳定操作。
[0118]
第二频率支持方法由图4所示的控制方法实现。该控制方法不包括如上述方法中包括的df/dt环路。这是因为发现df/dt环路易受f
sys
的噪声分量的影响,而f
sys
噪声分量在具有高电平电力电子转换器的电力系统中可能是高的。可以通过在剩余的δf环路中设置较大的增益来至少部分地补偿df/dt环路的功能损失。通过补充df/dt环路减小了系统阻尼。最终,在典型扰动期间无需减小rocof。例如,在英国,发电厂需要能够在500毫秒的滚动时段内承受高达每秒1hz的rocof而不跳闸。
[0119]
部分a:主要频率控制期间无转子速度恢复
[0120]
上述的前两个目的(i)和(ii)通过在主要频率控制期间不将转子速度恢复到最佳mppt水平来实现。这通过不包括冲刷组件和自适应增益函数设置合适的功率控制基准来实现。
[0121]
作为参考,第二频率支持方法的功率控制基准可以通过等式(3)来描述:
[0122]
p
ref
=k
opt
ω3+k
p
(ωr,pl)δf。
[0123]
第二频率支持方法不包括冲刷组件,因此,δf环路402不随时间返回到零(与图3的方案相反)。这意味着风力涡轮机系统的转子速度(和惯性动能)在主要频率控制时段期间不会恢复到最佳mppt点。进而,这意味着不从电网吸收能量并且不存在频率第二骤降。
[0124]
第二频率支持方法导致在频率扰动之后从风力涡轮机系统提取显著更多的惯性能量。由于提供给电网以支持频率的能量的增加,这允许频率曲线104的频率最低点被显著地改善。事实上,频率最低点105与所定义的稳定频率107一样高(参见图1),该稳定频率是电网得以保持的可接受的频率。通过增加连接到电网的附加发电机的功率输出,可以在辅助控制时段期间将频率逐渐调节到标称值。无需人为地恢复转子速度,并且无需考虑或设计复杂的转子速度恢复曲线。
[0125]kopt
ω
r3
的功率基准保留在控制器中,同时由δf环路提供频率支持。参考图5,这种安排的理由是:
[0126]-在主要频率控制时段期间,k
opt
ω
r3
(曲线501)由于惯性动能捕获所导致的ωr的降低而减小。在频率支持结束之后,风力涡轮机系统将自动地稳定在低于p
mppt
的功率输出(曲线502上的点b)。作为示例,这可以在图1中观察到,其中频率响应曲线104稳定在稳定频率107。继续参考图5,ωr反映风力涡轮机系统的能量水平。在主要频率控制时段期间,由于功率生产过剩,电功率输出最初增加到点d,如曲线505所示。随后,电功率输出由上述等式(3)确定,并且因此稳定在机械功率捕获曲线502上的点b。点b是k
opt
ω
r3
(由曲线501确定)和k
p
(ω,pl)δf(如下所述的自适应增益函数)(在图5中由点b和点c之间的距离表示)的和。由于转子速度(ωr)的降低,k
opt
ω
r3
减小(到点c)并且k
p
(ω,pl)δf增加,从而产生点b处的p
ref
值。因此,ωr的降低迫使输出功率沿捕获机械功率曲线502减小。稳定的功率输出在点b处,其中捕获机械功率等于电输出功率。由于在频率支持结束之后转子速度变慢,因此输出电功率减小。还应当注意,第二频率支持方法的方法将自动考虑风速的变化,如图5中的曲线501所示,其继承了mppt控制的益处并且将根据风速进行调整。
[0127]-在辅助频率控制时段期间,电网频率逐渐返回到标称值。因此,来自风力涡轮机系统的机械输入功率将变得大于电功率输出,从而导致转子速度ωr增加。换句话说,δf逐渐减小至零,从而导致k
opt
ω
r3
增加到p
mppt
水平处的k
opt
ω
ropt3
(参见图5上的点a)。不存在频率第二骤降,因为在每个时刻,由于δf的缓慢减小所致的风力涡轮机系统功率输出的微小减小将立即被用于辅助频率调节的附加发电机的增加所填补。因此,无需人为地恢复转子速度。
[0128]-包括k
opt
ω
r3
的功率基准使得风力涡轮机系统能够在mppt操作与频率支持操作之间自动且平滑地切换。
[0129]-与不包括电网频率f
sys
的输入的备选方案(本文未描述)相比,图4的所公开的频率支持方案可以自动地适应不同的频率事件和系统条件。
[0130]
第二频率支持方法的副作用是稳定频率低于第一频率支持方法的稳定频率,这可以从图1中曲线104和103的比较中观察到。然而,本发明人已经确定,第二方法的最终风功率捕获损失是最小的(《最大风功率捕获的1%)。此外,与第一方法相比,稳定频率仅略小(例如,在0.01hz以内)。
[0131]
在比较上述频率支持方法的模拟期间,第二频率支持方法显示出相对于第一频率
支持方法的显著改进。在一次测试中,风功率渗透水平被设置为35%,风速为12m/s。从第一方法中去除df/dt环路,并且δf环路的增益和冲刷组件的时间被选择为使得存在公平的比较。测试结果如图6(a-b)所示。
[0132]
曲线601(a-b)示出了第一频率支持方法的结果。曲线图602(a-b)示出了第二频率支持方法的结果。
[0133]
从图6a中可以观察到,第二方法的频率最低点604a升高到几乎与稳定频率605a相同(即,大约59.9hz)。第一方法的相应曲线图示出了显著小于稳定频率605a的频率最低点603a。
[0134]
图6b示出了第一方法的功率生产过剩持续的时间(大约7秒)与第一方案(大约22秒)相比更短。此外,第二方法的功率输出减小到比频率扰动之前的输出更低的水平。
[0135]
第一方法所示的功率输出的快速减小是由于需要将转子速度恢复到p
mppt
水平。对于第二方法,没有这样的要求。
[0136]
测试结果表明,第二方法提供了足够的功率生产过剩,使得电网中的其他发电机有足够的时间来承担电网中的额外需求。
[0137]
图6a示出了在第二方法下,频率没有振荡,而第一方法导致了若干频率振荡并且花费更长的时间来建立稳定。
[0138]
测试结果还表明(虽然图中未显示),在第二方法下,风力涡轮机的转子速度振荡较小,这意味着风力涡轮机系统上的机械压力得到了缓解。这对于具有大容量的海上风力涡轮机系统尤其有利。
[0139]
部分b:自适应增益
[0140]
参考图4,上述目的(iii)和(iv)通过实施自适应(或备选地被称为“动态的”)增益函数401来实现,该自适应增益函数可以是由下式给出的自适应非线性增益函数:
[0141]kp
(ωr,pl,x)=g(pl,x)*k(ωr)
ꢀꢀ
(4)
[0142]
其中,pl表示风功率渗透水平,矢量x表示m个系统操作条件并且由x=[x_1,x_2,x_3,...,x_m]给出。这些系统条件可以例如包括hvdc链路是否参与频率控制以及快速响应能量存储(例如,电池存储)是否参与频率控制。
[0143]
在(4)中,g(pl,x)用于适应不同的风功率渗透水平和操作条件。它在特定的pl下是常数,并且随pl的增加而减小。关于为何在较高的pl下需要较小增益的一些示例原因是:
[0144]
1、即使在相同的频率事件下,δf在更高的pl下也可以更大,这意味着需要更小的增益。
[0145]
2、对于较高的pl,更多的wts将参与频率支持,因此,如果在较低的pl使用相同的增益,则总的风功率捕获损失将更大。在实践中,g(pl,x)的设计取决于连接到电网的其他发电机或调节器的频率响应速度以及对来自风电场(wf)的频率支持的系统要求。通常,g(pl,x)的表达式可以使用基于通过模拟获得的某一特定pl下的g(pl)的离散值的线性或非线性内插或拟合函数来实现。
[0146]
在(4)中,k(ωr)用于在中风速和高风速下实现类似的fn改进并且确保wts的稳定操作,其由下式给出:
[0147]
[0148]
其中,ω
rmin
是最小转子速度。
[0149]
当风速高于风力涡轮机的最大额定速度时,通过使用俯仰角控制来控制ωr保持在ω
rmax
,该俯仰角控制是改变转子叶片的俯仰以防止转子叶片超过特定速度。在这种情况下,k(ωr)固定在当风速低于风力涡轮机的最大额定速度时,风力涡轮机系统维持在最佳操作mppt点,因为自适应增益k
p
由于在频率事件之前δf为零而将等于零。频率事件之前的初始ωr在不同风速下是不同的。因此,风速越高,k(ωr)越大,从而导致自适应增益k
p
越大。
[0150]kp
取决于ωr,原因如下:
[0151]
首先,在较高风速下,风功率输出与电网的总发电量的比率较高,从而导致对于频率扰动发生比在较低风速下出现相同频率扰动的情况更高的rocof和fn。因此,在较高的风速下,必须从风力涡轮机释放出更多的惯性动能,这需要更大的增益。
[0152]
其次,在较低的风速下,转子释放可得到的惯性动能较少。因此,较大的增益将导致转子速度的过度减速和大量风功率捕获损失。因此,在较低的风速下,适用较小的增益。
[0153]
等式(5)还表明,可以确保风力涡轮机系统的稳定性。
[0154]
首先,在中风速和高风速下,当输入风速降低和/或在频率支持时段期间存在连续的频率事件时,可以避免转子速度的过度减速。这是因为在频率支持时段期间,由于动能的释放,k(ωr)随ωr的降低而减小,因此,支持能力将随k(ωr)的减小而下降,这进而减慢了转子速度的降低。
[0155]
其次,在低风速下确保风力涡轮机系统的稳定性。这是因为如果ωr降低到接近ω
rmin
的水平,则k(ωr)接近于零,使得风力涡轮机系统的功率基准接近k
opt
ω
r3
,这停止了进一步的频率支持并且因此停止了转子速度的进一步降低。
[0156]
k(ωr)还可以被概括如下:
[0157]
k(ωr)=(ω
r-ω
rmin
)hꢀꢀꢀꢀ
(6)
[0158]
或者
[0159]
k(ωr)=(ωr)
h-(ω
rmin
)hꢀꢀꢀꢀ
(7)
[0160]
其中,h是可以被设置为常数的实数,并且h≤1.0。这些函数(6)、(7)和(5)之间的差别是在较低风速下的频率支持能力与在额定风速下的频率支持能力的不同比率。为了在一定的系统条件下在风速较低时具有强频率支持,应当选择具有较大比率的函数。在这种情况下,例如,可以选择函数(其中,h=1/2)或函数(其中,h=1/3)。
[0161]
为了示出在第二方法中实现的自适应增益的效果,进行了附加的模拟。已经证实,与使用固定增益相比,使用动态增益k(ωr)可以更有效地调节在不同风速和风力渗透水平下的功率生产过剩。为了模拟的目的,模拟方法之间的唯一差别是使用固定增益和动态增益。两种模拟方法均未被配置为使用冲刷组件。
[0162]
对应于不同的条件进行了四次模拟:
[0163]
案例1:风力渗透水平=20%,风速=8.5m/s
[0164]
案例2:风力渗透水平=20%,风速=12m/s
[0165]
案例3:风力渗透水平=50%,风速=8.5m/s
[0166]
案例4:风力渗透水平=50%,风速=12m/s
[0167]
在8.5m/s的风速和20%的风力渗透水平下,使用固定增益和动态增益对频率最低点的改善类似。当风速增加到12m/s时,当使用动态增益时提供更好的频率最低点改善,因为从风力涡轮机释放出更多的惯性动能。这是因为动态增益在风速较高时增加,而在使用固定增益时固定增益维持不变。
[0168]
确定固定增益在50%的风功率渗透水平下不再适用。固定增益导致惯性动能的过度释放,从而导致显著的风功率捕获损失和转子速度的过度减速。这种风功率捕获损失进一步降低了电网频率。降低的电网频率进而导致转子速度的更进一步的降低。
[0169]
最终,风力涡轮机系统的转子速度(对于固定增益的情况)降低到最小值,这迫使切换到mppt操作,从而将不稳定性引入到系统中。
[0170]
然而,在使用动态增益的情况下,增益在较高的风力渗透水平下减小,从而减少惯性动能的释放和转子速度的减速。这对于减轻生产过剩对电网频率的影响是必要的,该影响由于较高的风力渗透水平而被放大。动态增益仍然足够高以从风力涡轮机系统释放出大量惯性动能来快速地阻止频率下降。该增益随转子速度的降低而逐渐减小,从而降低频率支持的水平,由此避免了如在存在固定增益时所经历的转子速度的持续下降的现象。
[0171]
其他示例
[0172]
参考图7说明在电网跟随控制原理下利用基于dfig的风力涡轮机系统的示例快速频率响应方法。
[0173]
在图7所示的系统中指示了以下变量:
[0174]
ir是在转子侧测量的电流。
[0175]is
、vs是在定子侧测量的电流和电压。
[0176]
λs是计算的定子通量。
[0177]
ig、vg是在电网侧测量的电流和电压。
[0178]vdc
分别是dc链路电压基准和测量值。
[0179]
β是转子叶片的俯仰角。
[0180]
ω
rmax
、ωr分别是最大和实时转子速度。
[0181]
h1、h2是常数。
[0182]q*
是电网侧的d轴转子电流基准和无功功率基准。
[0183]
ω
rmin
、ω
rlim
是转子速度限制,以允许风速仅高于一定值的风力涡轮机系统参与快速频率支持。
[0184]
ω
r1
是(ω
ropt-h1),其中ω
ropt
是如果风力涡轮机系统在当前风速下根据mppt控制工作时的转子速度,∈是小的正常数,并且h1与ω
ropt
成正比。该磁滞比较器将限制与ω
ropt
相关的转子速度的减小量并且避免风力涡轮机系统失速。
[0185]
t
ref
是限制在风力涡轮机系统的机械极限范围内的转矩基准。
[0186]
gsc 205向电网206产生所需的无功功率。从gsc输出到电网的ac的频率取决于用于park变换(将三相信号(abc)转换为直流信号(dq))和逆park逆变换(将直流信号(dq)转换为三相信号(abc))的相位角θ
pll
。θ
pll
由锁相环(pll)组件基于电网电压vg产生。这意味着从gsc 205产生的ac电压的频率基于电网频率。例如,如果电网频率降低,则gsc 205必须输
出相应的降低的频率。随着电网频率利用上述原理得以恢复,gsc 205相应地向电网输出匹配的增加的频率。因此,wts利用“电网跟随”控制原理。由pll产生的角速度ω
pll
(电网频率的有效测量)用于如上文关于图4所述的有利的快速频率支持控制中的频率反馈信号。这意味着不需要连接到电网的多个wts之间的通信。
[0187]
参考图10说明在电网形成控制原理下利用基于pmsg的风力涡轮机系统的示例快速频率响应方法。
[0188]
为了使风功率捕获最大化,图10中的k
opt
略小于图2中的最佳系数k
opt
(其根据风功率捕获特性计算以使风功率捕获最大化),因为当交换dc链路电压和mppt控制被交换时需要考虑功率转换器的微小切换损失。
[0189]“电网形成”意味着功率转换器形成/创建其自身的电压相量并且主动地参与形成/创建电网电压,因此可以在没有同步发电机的情况下工作。与功率转换器利用电网跟随原理的情况相比,附接到电网的功率转换器使用电网形成原理有利地提供了更稳定的电网。通常,“电网形成”转换器具有以下能力:创建系统电压、呈分布式和自主控制、有助于系统惯性、无电源启动、有助于故障水平、充当反谐波吸收器、动作以防止不良的控制系统交互、支持系统分裂情况下的系统生存等。
[0190]
为了实现电网形成控制和最大风功率跟踪(mppt)控制两者,dc链路电压由转子侧转换器(rsc)(也被称为机器侧转换器(msc))控制,而最大风功率跟踪控制(k
opt
ω
r3
)在处于电网形成控制逻辑下的电网侧转换器(gsc)中实现。另一方面,在图8和图10中,dc链路电压控制(即,pi控制器)和mppt控制(即,k
opt
ω
r3
)也可以分别由gsc和msc控制,同时实现电网形成控制原理。
[0191]
gsc 205的电网形成控制通常由p-f/q-v下垂控制、具有前馈解耦和补偿项的级联电压和电流矢量控制,park和park逆变换以及电压和电流限制组成。为了限制gsc 205的电流,建议使用当d轴和q轴电流基准的平方和的根大于最大电流限制时按比例缩小的d轴和q轴电流基准,加上抗扭转条件积分。“电网形成”来自这样的原理:用于park和park逆变换的角相位是虚拟角相位θ
vsm
,其由p-f下垂控制产生,而不是通过pll或类似组件产生,否则称为“电网跟随”——参见上文关于图7的描述。由p-f下垂控制产生的虚拟角频率ω
vsm
用于快速频率支持的输入,使得不需要多个wts系统之间的通信。应当注意,图10仅示出了一种类型的电网形成控制,其可以例如是虚拟振荡器控制、可调度虚拟振荡器控制、同步机仿真。关于所有附图描述gsc的输入的框图是示例且非限制性的。在正常情况下,ω
vsm
等于或非常接近电网标称频率ω0。因此,gsc的输出功率是p=pm=k
opt
ω
r3
,使得实现最大风功率跟踪控制。
[0192]
俯仰角控制器208用于在风速高于最大值时通过控制转子叶片的俯仰β来限制转子速度。风力涡轮机从风中捕获的机械功率和风功率捕获表达式与等式(1)(2)中所表达的相同。
[0193]
在图10所示的系统中指示了以下变量。
[0194]
ir是pmsg的输出电流。
[0195]
ic、vo是lc滤波器的电流和电压。
[0196]
ig、p、q是注入到电网的电流、有功和无功功率。
[0197]vdc
是dc链路电压。
[0198]
β是转子叶片的俯仰角。
[0199]
ω
rmax
、ωr是最大和实时转子速度。
[0200]mq
是q-v下垂控制环路的常数。
[0201]
ωb是电网的基本角频率,即100π或120π弧度/秒。
[0202]q*
是相关的基准。
[0203]
ω
vsm
是通过电网形成控制原理产生的虚拟角频率。
[0204]
对于一定的风功率渗透水平,为了充分且及时地利用wts的动能以在频率相当低时提供快速频率支持并且保护wts不失稳,将最大风功率基准k
opt
ω
r3
修改为:
[0205][0206]
其中,虚拟频率f
vsm
=2πω
vsm
,f
db1
是正频率死区(在该示例中,其为49.085/50p.u.),并且ε是小的正常数。
[0207]
如从(8)中看到的,当频率在欠频事件期间降低到某一值以下(即,f
vsm
≤f
db1-ε)时,p
ref
随k
opt
降低到(k
opt-k1)而变得更小,使得支持频率的功率生产过剩更少。因此,避免了转子速度的过度减速并且保护了wts免于失稳。
[0208]
为了将频率最低点(fn)提高到接近稳定频率/在稳定频率内并且通过利用存储在wts中的动能/惯性能量来充分降低rocof,大部分动能/惯性能量应当在频率相当低时被释放。因此,在(8)中,当频率变低时,k1应当减小,其被设计为(9):
[0209][0210]
其中,ω
ropt
是如果风力涡轮机系统在当前风速下根据mppt控制工作时的最佳转子速度,f
db2
是第二正角频率死区(例如,0.1/50p.u.),k2是正常数,k3(pl,x)是与风功率渗透水平和电力系统操作条件相关的正常数,ω
rlim
是转子速度的极限。
[0211]
此处应当指出等式(9)中的三个特性:
[0212]
1、k1在(9)中通过使用(ω
ropt-ωr)在动能释放期间随实时转子速度ωr的减小而增加。因此,(k
opt-k1)变得更小,使得wts的功率生产过剩随实时转子速度ωr的减小而减少。以此方式,保护了wts免于过度减速和失稳。
[0213]
2、当f
vsm
≤f
db2
时,k1随频率f
vsm
的减小而开始减小,换句话说,wts开始加速动能的释放。这导致在频率将处于频率最低点周围期间释放出大部分动能。max[1+k3(pl,x)(f
vsm-f
db2
),0]可以确保在f
vsm
≤f
db2
时k1的平稳变化。
[0214]
3、在(9)中,自适应增益具有两个功能:(i)它适应风速的变化,因为它在不同的风速下是不同的;(ii)它保护wts免于过度减速,即确保wts的稳定性。因为在快速频率支持时段期间,它随转子速度的降低而变得更大。然后,(k
opt-k1)减小,从而wts的电输出功率减小。此外,当转子速度接近极限值ω
rlim
时,自适应增益变为无穷大,因此,(k
opt-k1)和wts的电输出功率降低到负无穷大,这意味着ωr将大于ω
rlim
并且未达到ω
rlim
。
[0215]
等式(9)中的k3(pl,x)和图10中的下垂系数m
p
(pl,x)用于适应不同的风功率渗透水平和电力系统操作条件。它们在特定的pl下是恒定的,并且k3(pl,x)随pl的增加而减小,而m
p
(pl,x)随pl的增加而增加,这表明来自每个wts的频率支持较弱。原因在于,对于较高的pl,更多的wts将参与频率支持,因此需要来自每个wts的支持更少。此外,较小的支持导致较小的风功率捕获损失,因此,在较高pl下的总的风功率捕获损失可以维持在合理的范围内。在实践中,k3(pl,x)和m
p
(pl,x)的设计取决于连接到电网的其他发电机或调节器的频率响应速度以及对来自风电场(wf)的频率支持的系统要求。通常,k3(pl,x)和m
p
(pl,x)的表达式可以使用基于通过模拟获得的某一特定pl下的k3(pl,x)和m
p
(pl,x)的离散值的线性或非线性内插或拟合函数来实现。通常,下垂系数m
p
(pl,x)大约在[0.015,0.035]的范围内,以确保在电网形成控制原理下gsc的稳定性。
[0216]
为了在频率支持时段期间100%确保wts稳定性,在图10中的gsc 205中,当转子速度低于ω
r1
时,将转子速度的比例积分(pi)控制或有功功率误差的积分添加到虚拟角速度ω
vsm
中,使得wts处于恒定速度或恒定有功功率控制中,并且对电网频率调节没有贡献。以此方式,限制了转子速度的减小量,并且避免了转子速度的过度减速和潜在的大量风功率捕获损失。在图10中,ω
r1
是(ω
ropt-h1),其中ω
ropt
是如果风力涡轮机系统在当前风速下根据mppt控制工作时的最佳转子速度,∈是小的正常数,并且h1与ω
ropt
成正比。
[0217]
当电网频率ωg(即ω
vsm
,因为ω
vsm
通常与电网频率同步)在可接受的水平内时,通过频率的磁滞比较器自动地切断转子速度的pi控制或有功功率误差的积分,并且wts恢复到正常控制。
[0218]
图8和图9分别示出了利用上述原理以及电网形成和电网跟随方法的示例系统。
[0219]
在以上案例1至4中讨论的模拟是利用dfig使用电网跟随控制原理来进行的。已经进行了附加的模拟(案例5和6)来研究利用pmsg发电机使用电网跟随和电网形成控制原理的效果。
[0220]
案例5:风力渗透水平=50%,风速=8.5m/s
[0221]
案例6:风力渗透水平=50%,风速=12m/s
[0222]
图11a和图11b中的案例5-6的模拟结果表明,对于在电网跟随和电网形成控制原理下的pmsg wts中施用所提出的快速频率支持控制,fn被提高到接近稳定频率/在稳定频率内,远高于mppt控制下的fn,相应地,rocof变得小于mppt控制下的rocof。此外,所提出的快速频率支持控制和mppt控制下的稳定频率非常接近,差异在0.01hz左右。曲线1101是mppt操作的频率响应。1102是使用pmsg发电机的电网跟随快速频率支持的频率响应。1103是使用pmsg发电机的电网形成快速频率支持的频率响应。
[0223]
图12a和图12b示出了在案例5-6中,电网形成控制原理下的pmsg wts使用不同的固定下垂增益和所提出的自适应快速频率支持增益的比较模拟结果。
[0224]
案例5,速度=8.5m/s:
[0225]
曲线1202:固定增益m
p
=0.035
[0226]
曲线1206:固定增益m
p
=0.02
[0227]
曲线1205:自适应增益
[0228]
案例6,速度=12m/s:
[0229]
曲线1201:固定增益m
p
=0.035
[0230]
曲线1203:固定增益m
p
=0.02
[0231]
曲线1204:自适应增益
[0232]
从曲线1201和曲线1204可以看出,在固定增益m
p
=0.035的情况下,在12m/s的风速时,fn被提高到与稳定频率相同,然而,由于风功率捕获损失较大,因此该fn远低于所提出的控制的fn。在固定增益m
p
=0.035的情况下,在8.5m/s的风速时,从蓝色和青色虚线可以看出,wts的频率和转子速度仍然在降低,一直到120s的模拟时间为止,这意味着wts已经不稳定。在固定增益m
p
=0.02的情况下,在12m/s和8.5m/s的风速时,可以看出wts是不稳定的。应当注意,m
p
增益越大,来自wts的频率支持将越小。然而,过大的m
p
使得ω
vsm
的变化大,这意味着电网形成控制的控制性能差。模拟结果证实了这一点,其表明当m
p
>0.035时,即使在微小的扰动下,也会存在振幅增加的高频振荡。
[0233]
结论
[0234]
所公开的方法使得能够使用风力涡轮机系统的存储的惯性动能来改善电网中的频率事件之后的频率最低点。具体地,频率最低点被改善为几乎等于或接近稳定频率。避免了频率第二骤降。充分降低了频率变化率(rocof)。在方法中使用动态增益实现了不同风速和风功率渗透水平下的有利的频率性能和系统稳定性。本文主要公开的方法与基于dfig和pmsg的风能发电系统相关。然而,应当指出,所公开的方法适用于其他类型的风能发电系统,例如,具有鼠笼式感应发电机和绕线转子同步发电机的电力电子接口变速风力涡轮机系统。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1