空燃比传感器的劣化判定装置的制作方法
1.本发明涉及一种空燃比传感器的劣化判定装置,其判定检测内燃机的废气的空燃比的空燃比传感器的响应劣化。
背景技术:
2.空燃比传感器设置在内燃机的排气通道,大范围地检测废气的空燃比,其检测结果用于混合气体的空燃比的反馈控制、或废气净化装置的再生控制等。另外,空燃比传感器一般随着不断使用,响应性下降的响应劣化加快,因此进行其劣化判定。进而,已知废气中的灰尘附着在空燃比传感器的盖等,若堆积量变多,则响应性暂时地下降。
3.着眼于所述特性,例如在专利文献1中记载有一种防止由灰尘(粒子状物质)的堆积所引起的空燃比传感器的响应性的下降的控制装置。在所述控制装置中,基于经检测的内燃机的负荷及转速,使用规定的图表来推断灰尘朝空燃比传感器的附着量。当经推断的灰尘附着量为规定量以上时,视作存在空燃比传感器的响应性恶化的担忧,而执行用于去除已附着在空燃比传感器的灰尘的灰尘(颗粒物(particulate matter,pm))去除控制。所述灰尘去除控制通过如下方式来进行:使吸入空气量增大,由此提高排气流速,将灰尘吹跑,并且使排气温度上升,使灰尘燃烧。
4.[现有技术文献]
[0005]
[专利文献]
[0006]
[专利文献1]日本专利第6254411号公报
技术实现要素:
[0007]
[发明所要解决的问题]
[0008]
如上所述,空燃比传感器具有若灰尘的堆积量变多,则响应性下降的特性,但即便堆积量相同,响应性的下降程度也不固定。另外,已附着在空燃比传感器的灰尘对应于其后的内燃机的运转状态,例如当进行了高负荷运转时,有时从空燃比传感器脱离(被剥离),在此情况下,响应性的下降是暂时的,存在响应性恢复的可能性。
[0009]
对此,在以往的控制装置中,当基于内燃机的负荷及转速所推断的空燃比传感器的灰尘附着量为规定量以上时,只是判定存在空燃比传感器的响应性恶化的担忧,无法高精度地进行所述判定。另外,虽然如所述那样,由灰尘的堆积所引起的响应性的下降是暂时的,其后存在恢复的可能性,但当灰尘附着量为规定量以上时,视作存在响应性恶化的担忧,而无益地执行灰尘去除控制。
[0010]
本发明是为了解决以上的课题而形成的发明,其目的在于提供一种空燃比传感器的劣化判定装置,所述空燃比传感器的劣化判定装置可一边避免起因于由灰尘的堆积所引起的暂时的响应性的下降的误判定,一边高精度地判定空燃比传感器的响应劣化。
[0011]
[解决问题的技术手段]
[0012]
为了达成所述目的,技术方案1的发明是一种空燃比传感器的劣化判定装置,其判
定设置在排气通道5,检测内燃机3的废气的空燃比的空燃比传感器(实施方式中的(以下,在本项中相同)af(air
‑
fuel ratio)传感器23)的响应劣化,其特征在于包括:响应劣化判定部件(ecu 2,图3的步骤2,图4),基于废气的空燃比变化时的空燃比传感器的输出的变化状态,判定空燃比传感器的响应劣化;附着/脱离参数算出部件(ecu 2,图6的步骤21~步骤23、步骤25、步骤26),在内燃机3的运转中,在各规定的周期算出附着/脱离状态参数(增减符号值ctsign)与附着/脱离程度参数(灰尘排出量计数器值ctsoot、排气温度计数器值cttemp、凝结水校正系数kdewdet、烃(hydrocarbon,hc)校正系数khc),所述附着/脱离状态参数表示处于废气中的灰尘附着在空燃比传感器的附着状态、或已附着的灰尘从空燃比传感器脱离的脱离状态的哪一个状态,所述附着/脱离程度参数表示针对灰尘对于空燃比传感器的附着或脱离的影响程度;灰尘堆积增减参数算出部件(ecu 2,图5的步骤13,图6),在各规定的周期,使用已算出的附着/脱离状态参数及附着/脱离程度参数,算出表示灰尘朝空燃比传感器的堆积增减量的灰尘堆积增减参数(灰尘堆积增减计数器值ctlafact);灰尘堆积判定参数算出部件(ecu 2,图5的步骤14),在各规定的周期,对已算出的灰尘堆积增减参数进行累计,由此算出表示当前的灰尘朝空燃比传感器的堆积量的灰尘堆积判定参数(灰尘堆积判定计数器值ctlafttl);以及判定保留部件(ecu 2,图5的步骤4、步骤5),在利用响应劣化判定部件的空燃比传感器的响应劣化的判定已完成的情况下,当由已算出的灰尘堆积判定参数表示的灰尘堆积量比规定量(规定值ctref)更大时(图3的步骤4:否(no)),保留响应劣化的判定。
[0013]
根据所述空燃比传感器的劣化判定装置,基于在废气的空燃比变化时所获得的空燃比传感器的输出的实际的变化状态,判定空燃比传感器的响应劣化。另外,用于许可/保留其判定结果的灰尘堆积判定参数以如下方式算出。即,在内燃机的运转中,在各规定的周期,首先算出表示灰尘对于空燃比传感器的附着或脱离状态的附着/脱离状态参数、及表示针对灰尘对于空燃比传感器的附着或脱离的影响程度的附着/脱离程度参数。另外,在各规定的周期,使用所述附着/脱离状态参数及附着/脱离程度参数,算出表示灰尘朝空燃比传感器的堆积增减量的灰尘堆积增减参数,并且对所述灰尘堆积增减参数进行累计,由此算出表示当前的灰尘朝空燃比传感器的堆积量的灰尘堆积判定参数。
[0014]
通过以上的算出方法,可在各规定的周期,一边参考灰尘的附着或脱离状态,反映对灰尘对于空燃比传感器的附着或脱离带来的影响程度,一边始终高精度地算出表示当前的灰尘朝空燃比传感器的堆积量的灰尘堆积判定参数。
[0015]
而且,根据本发明,当空燃比传感器的响应劣化的判定完成时,在此时的由灰尘堆积判定参数表示的灰尘堆积量比规定量更大时,视作存在由灰尘的堆积所引起的空燃比传感器的暂时的响应性的下降对响应劣化的判定结果带来影响的担忧,而保留响应劣化的判定。由此,避免响应劣化的误判定。另一方面,在由灰尘堆积判定参数表示的灰尘堆积量为规定量以下时,视作不存在误判定的担忧,而许可响应劣化的判定。通过以上所述,可一边避免起因于由灰尘的堆积所引起的暂时的响应性的下降的误判定,一边高精度地判定空燃比传感器的响应劣化。
[0016]
另外,为了达成所述目的,技术方案2的发明是一种空燃比传感器的劣化判定装置,其判定设置在排气通道5,检测内燃机3的废气的空燃比的空燃比传感器(af传感器23)的响应劣化,其特征在于包括:响应劣化判定部件(ecu 2,图13的步骤35,图4),基于废气的
空燃比变化时的空燃比传感器的输出的变化状态,判定空燃比传感器的响应劣化;附着/脱离参数算出部件(ecu 2,图6的步骤21~步骤23、步骤25、步骤26),在内燃机3的运转中,在各规定的周期算出附着/脱离状态参数(增减符号值ctsign)与附着/脱离程度参数(灰尘排出量计数器值ctsoot、排气温度计数器值cttemp、凝结水校正系数kdewdet、hc校正系数khc),所述附着/脱离状态参数表示处于废气中的灰尘附着在空燃比传感器的附着状态、或已附着的灰尘从空燃比传感器脱离的脱离状态的哪一个状态,所述附着/脱离程度参数表示针对灰尘对于空燃比传感器的附着或脱离的影响程度;灰尘堆积增减参数算出部件(ecu 2,图5的步骤13,图6),在各规定的周期,使用已算出的附着/脱离状态参数及附着/脱离程度参数,算出表示灰尘朝空燃比传感器的堆积增减量的灰尘堆积增减参数(灰尘堆积增减计数器值ctlafact);灰尘堆积判定参数算出部件(ecu 2,图5的步骤14),在各规定的周期,对已算出的灰尘堆积增减参数进行累计,由此算出表示当前的灰尘朝空燃比传感器的堆积量的灰尘堆积判定参数(灰尘堆积判定计数器值ctlafttl);以及判定禁止部件(ecu 2,图13的步骤31、步骤32),当由已算出的灰尘堆积判定参数表示的灰尘堆积量比规定量(规定值ctref)大时(图13的步骤31:否),禁止响应劣化的判定。
[0017]
在本发明中,与技术方案1的情况同样地,在各规定的周期,使用附着/脱离状态参数及附着/脱离程度参数,算出表示当前的灰尘朝空燃比传感器的堆积量的灰尘堆积判定参数。而且,根据本发明,当由已算出的灰尘堆积判定参数表示的灰尘堆积量比规定量更大时,视作存在由灰尘的堆积所引起的空燃比传感器的暂时的响应性的下降对响应劣化的判定结果带来影响的担忧,而禁止响应劣化的判定。由此,避免响应劣化的误判定。另一方面,当由灰尘堆积判定参数表示的灰尘堆积量为规定量以下时,视作不存在误判定的担忧,而许可响应劣化的判定。通过以上所述,与技术方案1的情况同样地,可一边避免起因于由灰尘的堆积所引起的暂时的响应性的下降的误判定,一边高精度地判定空燃比传感器的响应劣化。另外,可事先禁止在技术方案1的情况下被保留的利用劣化判定部件的劣化判定。
[0018]
技术方案3的发明的特征在于:在技术方案1或技术方案2中记载的空燃比传感器的劣化判定装置中,附着/脱离状态参数(增减符号值ctsign)以当推断废气的流速小时表示附着状态,当推断废气的流速大时表示脱离状态的方式算出(图8)。
[0019]
一般而言,废气的流速越小,废气与空燃比传感器的接触时间越长,因此废气中的灰尘容易附着在空燃比传感器,相对于此,废气的流速越大,已附着在空燃比传感器的灰尘越被废气吹跑,由此容易从空燃比传感器脱离。根据所述结构,对应于废气的流速,以与此种倾向一致的方式算出附着/脱离状态参数,因此可利用已算出的附着/脱离状态参数来适当地表示灰尘的附着状态或脱离状态。
[0020]
技术方案4的发明的特征在于:在技术方案1至技术方案3的任一者中记载的空燃比传感器的劣化判定装置中,还包括获取内燃机3的负荷le的负荷获取部件(油门开度传感器25)、及获取内燃机3的转速ne的转速获取部件(曲柄角传感器21),附着/脱离参数算出部件基于已获取的内燃机3的负荷le及内燃机3的转速ne,将表示由来自内燃机3的灰尘的排出量所产生的影响程度的灰尘排出量参数(灰尘排出量计数器值ctsoot)作为附着/脱离程度参数来算出(图6的步骤21,图7)。
[0021]
一般而言,来自内燃机的灰尘的排出量对应于内燃机的负荷及转速而变化,并且对灰尘对于空燃比传感器的附着或脱离的程度带来大的影响。因此,以与此种倾向一致的
方式,基于已获取的内燃机的负荷及转速,算出表示由来自内燃机的灰尘的排出量所产生的影响程度的灰尘排出量参数,并将其作为附着/脱离程度参数,由此可更高精度地进行灰尘堆积增减参数及灰尘堆积判定参数的算出。
[0022]
技术方案5的发明的特征在于:在技术方案1至技术方案4的任一者中记载的空燃比传感器的劣化判定装置中,还包括获取废气的温度(排气温度tex)的废气温度获取部件(排气温度传感器24),附着/脱离参数算出部件将表示由已获取的废气的温度所产生的影响程度的排气温度参数(排气温度计数器值cttemp)作为附着/脱离程度参数来算出(图6的步骤23,图9)。
[0023]
一般而言,废气的温度越低,废气中的灰尘越容易附着在空燃比传感器,废气的温度越高,已附着在空燃比传感器的灰尘越容易脱离。因此,以与此种倾向一致的方式,算出表示由已获取的废气的温度所产生的影响程度的排气温度参数,并将其作为附着/脱离程度参数,由此可更高精度地进行灰尘堆积增减参数及灰尘堆积判定参数的算出。
[0024]
技术方案6的发明的特征在于:在技术方案1至技术方案5的任一者中记载的空燃比传感器的劣化判定装置中,还包括获取内燃机3的温度te的内燃机温度获取部件(水温传感器26),附着/脱离参数算出部件基于已获取的内燃机3的温度te,将表示由废气中的凝结水所产生的影响程度的凝结水参数(凝结水校正系数kdewdet)作为附着/脱离程度参数来算出(图6的步骤25,图10)。
[0025]
一般而言,内燃机的温度越低,废气中的水分越容易凝结,凝结水越多,灰尘越容易附着。因此,以与此种倾向一致的方式,基于已获取的内燃机的温度,算出表示由废气中的凝结水所产生的影响程度的凝结水参数,并将其作为附着/脱离程度参数,由此可更高精度地进行灰尘堆积增减参数及灰尘堆积判定参数的算出。
[0026]
技术方案7的发明的特征在于:在技术方案1至技术方案6的任一者中记载的空燃比传感器的劣化判定装置中,附着/脱离参数算出部件将表示由内燃机的浓控制(rich control)时的废气中的hc成分的增加所产生的影响程度的hc参数(hc校正系数khc)作为附着/脱离程度参数来算出(图6的步骤26,图11)。
[0027]
在内燃机的浓控制时,与通常控制时相比,废气中的未燃hc成分增加,因此灰尘朝空燃比传感器的附着量变多。根据所述结构,算出表示由内燃机的浓控制时的废气中的hc成分的增加所产生的影响程度的hc参数,并将其作为附着/脱离程度参数,因此可更高精度地进行灰尘堆积增减参数及灰尘堆积判定参数的算出。
附图说明
[0028]
图1是将包含应用本发明的空燃比传感器的内燃机的排气系统的结构与内燃机一同概略性地表示的图。
[0029]
图2是将空燃比传感器的劣化判定装置与输入/输出元件等一同表示的框图。
[0030]
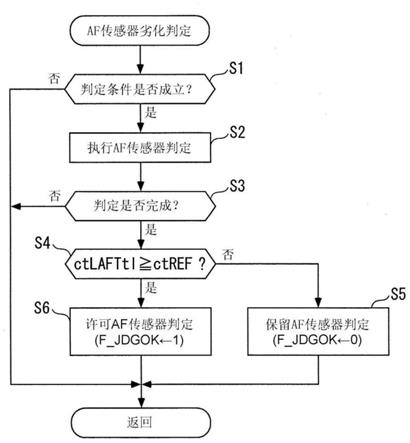
图3是表示第一实施方式的由图2的电子控制单元(electronic control unit,ecu)执行的空燃比传感器的劣化判定处理的流程图。
[0031]
图4是用于说明劣化判定的方法的图。
[0032]
图5是表示灰尘堆积判定计数器值的算出处理的流程图。
[0033]
图6是表示灰尘堆积增减计数器值的算出处理的流程图。
[0034]
图7是用于灰尘排出量计数器值的算出的图表。
[0035]
图8是用于增减符号值的算出的图表。
[0036]
图9是用于排气温度计数器值的算出的图表。
[0037]
图10是用于凝结水校正系数的算出的图表。
[0038]
图11是用于hc校正系数的算出的图表。
[0039]
图12是表示通过图3的劣化判定处理所获得的动作例的时序图。
[0040]
图13是表示第二实施方式的由图2的ecu执行的空燃比传感器的劣化判定处理的流程图。
[0041]
[符号的说明]
[0042]
2:ecu(响应劣化判定部件、附着/脱离参数算出部件、灰尘堆积增减参数算出部件、灰尘堆积判定参数算出部件、判定保留部件、判定禁止部件)
[0043]
3:内燃机
[0044]
5:排气通道
[0045]
21:曲柄角传感器(转速获取部件)
[0046]
23:af传感器(空燃比传感器)
[0047]
24:排气温度传感器(废气温度获取部件)
[0048]
25:油门开度传感器(负荷获取部件)
[0049]
26:水温传感器(内燃机温度获取部件)
[0050]
ctsign:增减符号值(附着/脱离状态参数)
[0051]
ctsoot:灰尘排出量计数器值(附着/脱离程度参数)
[0052]
cttemp:排气温度计数器值(附着/脱离程度参数)
[0053]
kdewdet:凝结水校正系数(附着/脱离程度参数)
[0054]
khc:hc校正系数(附着/脱离程度参数)
[0055]
ctlafact:灰尘堆积增减计数器值(灰尘堆积增减参数)
[0056]
ctlafttl:灰尘堆积判定计数器值(灰尘堆积判定参数)
[0057]
ctref:规定值
[0058]
le:发动机负荷(内燃机的负荷)
[0059]
ne:发动机转速(内燃机的转速)
[0060]
tex:排气温度(废气的温度)
[0061]
te:内燃机的温度
具体实施方式
[0062]
以下,一边参照附图,一边对本发明的优选的实施方式进行说明。图1表示在排气系统中包括应用本发明的空燃比传感器的内燃机。所述内燃机(eng)(以下称为“发动机”)3例如为装载在车辆(未图示)的四气缸的汽油发动机。
[0063]
在发动机3的各气缸(未图示)连接进气通道4及排气通道5,并且安装有燃料喷射阀6及火花塞7(参照图2)。燃料喷射阀6将从燃料箱供给的燃料喷射至燃烧室(均未图示),火花塞7将已在燃烧室内生成的混合气体点燃。燃料喷射阀6及火花塞7的动作由来自ecu(电子控制单元)2的控制信号控制,由此控制燃料喷射量及燃料喷射时期或点火时期。
[0064]
在发动机3的曲柄轴(未图示)设置有曲柄角传感器21。曲柄角传感器21伴随曲柄轴的旋转,将作为脉冲信号的crk信号每隔规定的曲柄角(例如30度)输出至ecu 2。ecu 2基于所述crk信号,算出发动机3的转速(以下称为“发动机转速”)ne。
[0065]
在进气通道4设置有气流传感器22。气流传感器22检测经由进气通道4而被吸入发动机3的气缸的吸入空气量gair,并将其检测信号输出至ecu 2。另外,吸入空气量gair与从气缸排出的废气流量大致相等,因此ecu 2根据吸入空气量gair来算出废气流量qex。
[0066]
在排气通道5,从上游侧起依次设置有涡轮增压器(t/c)8的涡轮机8a、三效催化剂(cat)9及柴油微粒过滤器(diesel particulate filter,dpf)10。
[0067]
涡轮增压器8的涡轮机8a由排气能量进行旋转驱动,通过配置在进气通道4的压缩机(未图示)与涡轮机8a一体地旋转来进行增压动作。
[0068]
三效催化剂9在废气为相当于理论空燃比的化学计量空气时,对废气中的co、hc及nox这三种成分进行净化。dpf 10捕捉穿过了三效催化剂9的废气中的粒子状物质(pm)。另外,在粒子状物质的捕捉量已达到规定量时等,进行使粒子状物质燃烧的再生运转,由此使dpf 10再生。
[0069]
另外,在排气通道5的比涡轮机8a更下游侧且三效催化剂9的上游侧,设置有af传感器(空燃比传感器)23及排气温度传感器24。af传感器23是包含氧化锆及铂电极等的众所周知的传感器,在相对于理论空燃比的从浓区域至极稀区域为止的大范围的空燃比区域中,检测废气中的氧浓度,并将其检测信号输出至ecu 2。ecu 2基于af传感器23的检测信号,算出流入三效催化剂9的废气的空燃比。
[0070]
排气温度传感器24检测流入三效催化剂9的废气的温度(以下称为“排气温度”)tex,并将其检测信号输出至ecu 2。
[0071]
进而,从油门开度传感器25朝ecu 2输入表示车辆的油门踏板(未图示)的踏入量(以下称为“油门开度”)ap的检测信号,从水温传感器26朝ecu 2输入表示发动机3的冷却水的温度(以下称为“发动机水温”)tw的检测信号。
[0072]
ecu 2包含微型计算机,所述微型计算机包含中央处理器(central processing unit,cpu)、随机存取存储器(random access memory,ram)、只读存储器(read only memory,rom)、带电可擦可编程只读存储器(electrically erasable programmable read only memory,eeprom)、以及输入/输出(input/output,i/o)接口(均未图示)等。ecu 2对应于所述各种传感器21~26的检测信号等,辨别发动机3的运转状态,并且对应于经辨别的运转状态,执行各种控制。
[0073]
在所述控制中,除经由燃料喷射阀6的燃料喷射控制或经由火花塞7的点火时期控制等发动机控制以外,在本实施方式中特别包含判定af传感器23的劣化的劣化判定。在本实施方式中,ecu 2相当于响应劣化判定部件、附着/脱离参数算出部件、灰尘堆积增减参数算出部件、灰尘堆积判定参数算出部件、以及判定保留部件。
[0074]
以下,一边参照图3,一边对第一实施方式的af传感器23的劣化判定处理进行说明。此劣化判定处理基于废气空燃比已变化时的af传感器23的输出的变化状态(变迁),判定af传感器23的响应劣化,并且基于表示所述判定完成时的灰尘朝af传感器23的堆积量的灰尘堆积判定计数器值ctlafttl,最终确定或保留判定结果。在发动机3的运转中,以规定的周期(例如10msec)来执行本处理。
[0075]
在本处理中,首先在步骤1(图示为“s1”。以下相同)中,辨别劣化的判定条件是否成立。作为所述判定条件,需要废气空燃比从稳定的状态大幅度变化成其他废气空燃比。在本实施方式中,如图4所示,设定有发动机3已从规定的巡航运转转变成断油(fuel cut,f/c)运转这一条件。当步骤1的答案为否时,直接结束本处理。
[0076]
当步骤1的答案为是(yes),判定条件成立时,在步骤2中,执行af传感器23的劣化判定。如图4所示,在所述劣化判定中,监视发动机3从巡航运转转变成断油运转后的af传感器23的传感器输出vo。其结果,如在此图中表示成“正常”那样,在传感器输出vo的上升时间(从第一规定值vo1变化至第二规定值vo2为止所需要的时间)比规定值(未图示)更小而比较短的情况下,关于响应性,判定af传感器23正常。
[0077]
相对于此,如表示成“劣化1”那样,在传感器输出vo的上升时间为规定值以上而比较长的情况下,判定在af传感器23产生了响应劣化。另外,如表示成“劣化2”那样,在即便从断油运转的开始时起经过规定时间tmref,传感器输出vo也不到达第二规定值vo2的情况下,也判定在af传感器23产生了响应劣化。
[0078]
回到图3,在步骤3中,辨别步骤2的劣化判定是否已结束,当其答案为否时,直接结束本处理。另一方面,当步骤3的答案为是,af传感器23的劣化判定已完成时,进入步骤4,辨别在此时间点所算出的灰尘堆积判定计数器值ctlafttl是否为规定值ctref(例如0)以上。如后述那样,所述灰尘堆积判定计数器值ctlafttl的值越小,表示af传感器23的灰尘堆积量更大。
[0079]
因此,当步骤4的答案为否,灰尘堆积判定计数器值ctlafttl比规定值ctref更小时,视作af传感器23的灰尘堆积量大,在af传感器23产生了暂时的响应劣化,由此存在导致误判定的担忧,不许可步骤2中所获得的判定结果而保留(步骤5),为了表示此情况,将判定许可旗标f_jdgok设置成“0”,并结束本处理。
[0080]
另一方面,当步骤4的答案为是,灰尘堆积判定计数器值ctlafttl为规定值ctref以上时,视作af传感器23的灰尘堆积量小,由此不存在产生所述误判定的担忧,而许可步骤2的判定结果(步骤6),为了表示此情况,将判定许可旗标f_jdgok设置成“1”,并结束本处理。
[0081]
继而,一边参照图5~图11,一边对所述灰尘堆积判定计数器值ctlafttl的算出处理进行说明。在图5的主流程中,首先在步骤11中,辨别在本次的处理周期中点火开关(未图示)是否已被开启。当所述答案为是,发动机3的运转刚开始不久时,将在前次的运转结束时已被存储在ecu 2的eeprom中的灰尘堆积判定计数器值的最终值ctlafttllst作为灰尘堆积判定计数器值ctlafttl的本次的初始值来设定(步骤12)。
[0082]
在所述步骤12后、或步骤11的答案为否时,进入步骤13,算出灰尘堆积增减计数器值ctlafact。如后述那样,所述灰尘堆积增减计数器值ctlafact表示本次的处理周期中的灰尘朝af传感器23的堆积增减量。
[0083]
继而,进入步骤14,使在其之前所获得的灰尘堆积判定计数器值ctlafttl与在步骤13中所算出的灰尘堆积增减计数器值ctlafact相加,由此算出灰尘堆积判定计数器值ctlafttl的本次值,并结束本处理。
[0084]
图6表示所述灰尘堆积增减计数器值ctlafact的算出处理。在本处理中,首先在步骤21中,算出灰尘排出量计数器值ctsoot。所述灰尘排出量计数器值ctsoot表示从发动机3
排出的灰尘的排出量,通过对应于发动机负荷le及发动机转速ne,检索图7的图表来算出。另外,发动机负荷le以相对于总负荷的百分率(%)来表示基于油门开度ap及发动机转速ne所算出的负荷。
[0085]
在图7的图表中,基于来自发动机3的灰尘的排出量的倾向,以相对于发动机负荷le,在50%附近的中负荷区域中变成最大,相等于发动机转速ne,在2000rpm附近的中旋转区域中变成最大的方式设定灰尘排出量计数器值ctsoot。
[0086]
其次,在步骤22中,通过对应于发动机负荷le及发动机转速ne,检索图8的图表来算出增减符号值ctsign。在灰尘附着在af传感器23的附着状态时,将所述增减符号值ctsign设定成负值(
‑
1),在已附着的灰尘从空燃比传感器23脱离的脱离状态时,将所述增减符号值ctsign设定成正值(+1)。
[0087]
在图8的图表中,在中高负荷及中高旋转区域中,推断废气的流速大,废气与af传感器23的接触时间短,因此视作处于脱离状态,而将增减符号值ctsign设定成正值,在低负荷及低旋转区域中,推断废气的流速小,废气与af传感器23的接触时间长,因此视作处于附着状态,而将增减符号值ctsign设定成负值。
[0088]
继而,在步骤23中,通过对应于经检测的排气温度tex,检索图9的图表来算出排气温度计数器值cttemp。所述排气温度计数器值cttemp表示排气温度tex对灰尘的附着/脱离带来的影响程度。排气温度tex越高,所述影响程度越大,因此在图9的图表中,排气温度影响计数器值cttemp在400℃以上的高温区域中,被设定成比1.0更大的值,并且排气温度tex越高,排气温度影响计数器值cttemp被设定成更大的值。
[0089]
继而,使在所述步骤21中所算出的灰尘排出量计数器值ctsoot与在步骤22、步骤23中所算出的增减符号值ctsign及排气温度计数器值cttemp相乘,由此算出灰尘堆积增减计数器值ctlafact的基本值ctbase(步骤24)。
[0090]
继而,在步骤25中,通过对应于发动机温度te,检索图10的图表来算出凝结水校正系数kdewdet。所述凝结水校正系数kdewdet用于补偿在发动机3的低温时,由废气中的水分凝结所产生的灰尘朝af传感器23的附着程度的增加部分。因此,在图10的图表中,凝结水校正系数kdewdet在发动机温度te为60℃以下的低温区域中,被设定成比1.0更大的值,并且发动机温度te越低,凝结水校正系数kdewdet被设定成更大的值。
[0091]
另外,发动机温度te是代表发动机3的温度,在本实施方式中,将由水温传感器26所检测的发动机水温tw直接用作发动机温度te。作为发动机温度te,例如也可以采用由其他温度传感器所检测的进气温度或油温来代替所述发动机水温tw、或者也可以使用基于从发动机3的起动时起的运转时间的推断值。
[0092]
继而,在步骤26中,使用图11的图表来算出hc校正系数khc。所述hc校正系数khc用于补偿对发动机3进行了浓控制时的废气中的hc成分的增加部分。因此,在图11的图表中,hc校正系数khc在发动机3的通常控制时被设定成值1.0,在浓控制时被设定成更大的值1.1。
[0093]
最后,使在所述步骤24中所算出的基本值ctbase与在步骤25、步骤26中所算出的凝结水校正系数kdewdet及hc校正系数khc相乘,由此算出灰尘堆积增减计数器值ctlafact(步骤27),并结束本处理。
[0094]
根据以上的算出方法,灰尘堆积增减计数器值ctlafact表示各处理周期的af传感
器23中的灰尘的堆积量的增减量,当在灰尘已附着在af传感器23的附着状态下,推断堆积量增加时,灰尘堆积增减计数器值ctlafact作为负值来算出,当在灰尘已从af传感器23脱离的脱离状态下,推断堆积量减少时,灰尘堆积增减计数器值ctlafact作为正值来算出。另外,如上所述,在图5的步骤14中,当对灰尘堆积判定计数器值ctlafttl进行累计时,将灰尘堆积增减计数器值ctlafact用作加法项。
[0095]
根据以上的关系,灰尘堆积判定计数器值ctlafttl在灰尘的附着状态下减少,其值越小,表示af传感器23的灰尘堆积量更大。与其相反,灰尘堆积判定计数器值ctlafttl在灰尘的脱离状态下增加,其值越大,表示af传感器23的灰尘堆积量更小。
[0096]
继而,一边参照图12,一边对通过目前为止所说明的af传感器23的劣化判定处理所获得的动作例进行说明。在此例中,在时间点t0~时间点t1中,排气流速小,因此推断是灰尘的附着状态,将增减符号值ctsign设定成
‑
1,对应于此,灰尘堆积判定计数器值ctlafttl从值0减少。另外,时间点t1以后,排气流速变大,推断是灰尘的脱离状态,将增减符号值ctsign设定成+1,灰尘堆积判定计数器值ctlafttl增加。
[0097]
在此状态下,在时间点t2处,伴随转变成断油运转,执行af传感器23的劣化判定(图3的步骤2),并且在所述劣化判定完成时(时间点t3),将灰尘堆积判定计数器值ctlafttl与规定值ctref(=0)进行比较(步骤4)。在此情况下,灰尘堆积判定计数器值ctlafttl比0更小(步骤4:否),因此视作af传感器23的灰尘堆积量大,而保留af传感器23的劣化判定,将判定许可旗标f_jdgok维持成“0”。
[0098]
其后,伴随排气流速减少、增加,灰尘堆积判定计数器值ctlafttl从时间点t4减少,从时间点t5增加。而且,在时间点t6处,伴随转变成断油运转,执行af传感器23的劣化判定。在此情况下,在劣化判定完成时(时间点t7),灰尘堆积判定计数器值ctlafttl比0更大(步骤4:是),因此视作af传感器23的灰尘堆积量小,而许可af传感器23的劣化判定,将判定许可旗标f_jdgok设置成“1”。
[0099]
如上所述,根据本实施方式,基于发动机3从巡航运转转变成断油运转后,废气的空燃比变化时的af传感器23的输出的实际的变化状态,判定af传感器23的响应劣化(图4)。另外,在发动机3的运转中,在规定的周期算出表示灰尘对于af传感器23的附着或脱离状态的附着/脱离状态参数(增减符号值ctsign)、及表示针对灰尘对于af传感器23的附着或脱离的影响程度的附着/脱离程度参数(灰尘排出量计数器值ctsoot等)。
[0100]
另外,使用所述附着/脱离状态参数及附着/脱离程度参数,算出作为表示灰尘朝af传感器23的堆积增减量的灰尘堆积增减参数的灰尘堆积增减计数器值ctlafact,并且对所述灰尘堆积增减计数器值ctlafact进行累计,由此算出作为表示当前的灰尘朝af传感器23的堆积量的灰尘堆积判定参数的灰尘堆积判定计数器值ctlafttl。
[0101]
通过以上的算出方法,可在规定的周期,一边参考灰尘对于af传感器23的附着或脱离状态,反映对灰尘的附着或脱离带来的影响程度,一边始终高精度地算出表示当前的灰尘朝af传感器23的堆积量的灰尘堆积判定计数器值ctlafttl。
[0102]
而且,当af传感器23的响应劣化的判定完成时,在此时的灰尘堆积判定计数器值ctlafttl比规定值ctref更小时,即由堆积判定计数器值ctlafttl表示的灰尘堆积量比相当于规定值ctref的规定量更大时,视作存在由灰尘的堆积所引起的空燃比传感器的暂时的响应性的下降对响应劣化的判定结果带来影响的担忧,而保留响应劣化的判定。由此,避
免响应劣化的误判定。
[0103]
另一方面,当灰尘堆积判定计数器值ctlafttl为规定值ctref以上时,即灰尘堆积量比规定量更大时,在由灰尘堆积判定参数表示的灰尘堆积量为规定量以下时,视作不存在误判定的担忧,而许可响应劣化的判定。通过以上所述,可一边避免起因于由灰尘的堆积所引起的暂时的响应性的下降的误判定,一边高精度地判定af传感器23的响应劣化。
[0104]
另外,通过图8的图表,当基于发动机负荷le及发动机转速ne,推断废气的流速大时,将作为附着/脱离状态参数的增减符号值ctsign设定成表示灰尘的脱离状态的正值,当推断废气的流速小时,将作为附着/脱离状态参数的增减符号值ctsign设定成表示灰尘的附着状态的负值。由此,能够以适当地表示灰尘的附着状态或脱离状态的方式算出增减符号值ctsign,因此,可更高精度地进行使用增减符号值ctsign的灰尘堆积增减计数器值ctlafact及灰尘堆积判定计数器值ctlafttl的算出。
[0105]
另外,作为附着/脱离程度参数,通过图7的图表,对应于发动机负荷le及发动机转速ne来算出灰尘排出量计数器值ctsoot,通过图9的图表,对应于排气温度tex来算出排气温度计数器值cttemp,通过图10的图表,对应于发动机温度te来算出凝结水校正系数kdewdet,通过图11,对应于发动机3的运转模式来算出hc校正系数khc。
[0106]
通过以上所述,能够以适当地表示针对灰尘对于af传感器23的附着/脱离的影响程度的方式算出这些附着/脱离程度参数,因此,可更高精度地进行使用这些附着/脱离程度参数的灰尘堆积增减计数器值ctlafact及灰尘堆积判定计数器值ctlafttl的算出。
[0107]
继而,一边参照图13,一边对本发明的第二实施方式的af传感器23的劣化判定处理进行说明。在所述第一实施方式(图3)中,先执行af传感器23的劣化判定,对应于与其同时进行所算出的灰尘堆积判定参数,保留af传感器23的劣化判定,相对于此,在本实施方式中,先算出灰尘堆积判定参数,对应于其算出结果,禁止af传感器23的劣化判定。
[0108]
具体而言,首先在步骤31中,与图3的步骤4同样地,辨别灰尘堆积判定计数器值ctlafttl是否为规定值ctref以上。使用图5~图11的处理及图表,与第一实施方式同样地算出灰尘堆积判定计数器值ctlafttl。
[0109]
当步骤31的答案为否,ctlafttl<ctref成立时,视作af传感器23的灰尘堆积量大,在af传感器23产生了暂时的响应劣化,由此存在导致误判定的担忧,而禁止af传感器23的劣化判定(步骤32),为了表示此情况,将判定许可旗标f_jdgok2设置成“0”,并结束本处理。
[0110]
另一方面,当步骤31的答案为是,ctlafttl≧ctref成立时,视作af传感器23的灰尘堆积量小,由此不存在产生所述误判定的担忧,而许可af传感器23的劣化判定(步骤33),为了表示此情况,将判定许可旗标f_jdgok2设置成“1”。继而,辨别af传感器23的劣化判定的条件是否成立(步骤34),对应于所述条件的成立,执行af传感器23的劣化判定(步骤35)。通过图4中所示的方法,与第一实施方式同样地进行af传感器23的劣化判定。
[0111]
如上所述,根据本实施方式,当灰尘堆积判定计数器值ctlafttl比规定值ctref更小时,视作存在由灰尘的堆积所引起的af传感器23的暂时的响应性的下降对响应劣化的判定结果带来影响的担忧,而禁止af传感器23的劣化判定,另一方面,当灰尘堆积判定计数器值ctlafttl为规定值ctref以上时,许可af传感器23的劣化判定。由此,与第一实施方式同样地,可一边避免起因于由灰尘的堆积所引起的暂时的响应性的下降的误判定,一边高精
度地判定af传感器23的响应劣化。另外,可事先禁止在第一实施方式中被保留的af传感器23的劣化判定。
[0112]
另外,本发明并不限定于已说明的实施方式,能够以各种形态来实施。例如,在实施方式中,作为附着/脱离状态参数的增减符号值ctsign基于发动机负荷le及发动机转速ne,设想废气的流速来算出,但并不限定于此,也可以使用与灰尘的附着状态或脱离状态相关的其他适当的参数,例如废气的流量。
[0113]
另外,在实施方式中,作为附着/脱离程度参数,算出对应于发动机负荷le及发动机转速ne的灰尘排出量计数器值ctsoot、对应于排气温度tex的排气温度计数器值cttemp、对应于发动机温度te的凝结水校正系数kdewdet、及对应于发动机3的运转模式的hc校正系数khc,但只要表示针对灰尘对于af传感器23的附着或脱离的影响程度,则可将这些参数与其他适当的参数一同采用、或采用其他适当的参数来代替这些参数。进而,可为了算出相同的附着/脱离程度参数而使用与实施方式不同的参数。
[0114]
另外,实施方式是将包含氧化锆及铂电极等的af传感器用作空燃比传感器的例子,但并不限定于此,只要是可检测废气的空燃比的传感器即可,例如也可以使用二氧化钛型氧浓度传感器等。
[0115]
进而,实施方式是将本发明应用于汽油发动机的例子,但本发明的劣化判定装置并不限定于此,也可以应用于各种内燃机,例如柴油发动机。此外,可在本发明的主旨的范围内,适宜变更细微部分的结构。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1