一种风电机组停机状态下的载荷控制方法与流程
1.本发明涉及风力发电技术领域,特别涉及一种风电机组停机状态下的载荷控制方法。
背景技术:
2.风电机组是一个涉及空气动力学、结构动力学、机械设计、控制理论、电气、气象等多学科复杂系统。风电机组载荷的主要来源是气动载荷、重力载荷、惯性载荷,是影响整个风力发电系统安全性、制造成本和提高效率的重要因素。降低机组的载荷是提高机组发电性能、提质增效和降低制造成本的重要手段。
3.目前风电机组在设计阶段主要依据gl和iec61400标准对整机各种复杂工况条件下的极限和疲劳载荷进行计算分析,在此过程中考虑了风电机组使用寿命期内可能出现的所有极端和一般可能性,如极端阵风或极端湍流风、电网失电、变桨故障等等可能发生的以及机组寿命期内正常运行的情况。风电机组极限载荷往往发生在极端风况或故障工况所致的停机过程中。极限载荷越大,对风电机组各子系统和零部件的结构强度要求越高,因此须对其进行加强,才能保证零部件不发生失效或破坏。此举将限制机组的风轮直径和制造成本等,严重影响机组的发电性能。因此合理的设计和研究风电机组的载荷控制策略,有效降低机组的极限载荷,对风电机组的最优化选型和成本控制大有裨益。
4.随着风电机组的大型化发展,机组的叶片更长更柔、塔筒更高更软的趋势,机组的极限载荷大都发生在故障所致的停机过程中。现有风电机组对停机过程中极限载荷的控制方案是:停机过程中,给定一个固定的或阶段性恒定速率的变桨速率,来调节叶片的收桨速度,整个控制逻辑属于开环控制,并不能较好的降低极限载荷。
5.常规停机过程中发电机转矩是按照线性跌落至0或直接降至0,在主控检测到停机指令后,风轮由于受到风的推力作用,机舱位移传感器的位移信号为正,停机触发时由于叶片收桨卸载和发电机转矩的跌落导致风轮推力减小,因此机舱位移信号由当前位置逐渐减小至负向最大,然后慢慢震荡直至稳定。影响机组载荷特别是停机时极限载荷的主要因素是结构动态响应所致,负载直接减小会加剧结构动态响应对载荷的影响。
技术实现要素:
6.本发明的目的在于提供一种风电机组停机状态下的载荷控制方法,解决了负载直接减小加剧结构动态响应对载荷的影响的问题。
7.本发明是通过以下技术方案来实现:
8.一种风电机组停机状态下的载荷控制方法,包括以下过程:
9.在风电机组发生停机时,以当前机舱位移传感器的位移信号为基准,对停机过程中的发电机转矩进行调节;同时以当前机舱加速度信号对停机过程中的收桨速率进行调节;
10.发电机转矩的调节过程具体包括以下步骤:
11.s1、停机指令触发时,机舱位移先逐渐减小,发电机转矩逐渐增大,当发电机转矩达到允许最大转矩时,若机舱位移继续减小,保持发电机转矩恒定,直至机舱位移达到最小值;
12.s2、随后机舱位移开始反方向增大,此时发电机转矩反向减小,机舱位移在本周期内达到最大值时,发电机转矩停止减小;
13.s3、剩余停机周期内,重复s1和s2,调节发电机转矩,直至桨距角达到50
°
~60
°
;
14.s4、发电机转矩在随后的停机时间内,由当前的发电机转矩给定值开始线性跌落至0。
15.进一步,发电机转矩的调节公式为:
16.t
变
=t
停机
(1+δ
·
d)
17.其中,t
停机
为停机触发时的发电机转矩,d=d
停机-d
x
δ,d
停机
表示停机时刻的机舱位移值,d
x
停机过程中机舱实时位移值,δ表示调节增益。
18.进一步,采用查表法调节发电机转矩时,δ对应查表转矩对应的比例系数;
19.采用pi调节方式时,d表示机舱位移误差,s为拉普拉斯算子,kp表示比例环节增益值,ki表示积分环节增益值。
20.进一步,以当前机舱加速度信号对停机过程中的变桨速率进行调节的具体过程为:
21.风电机组停机触发时,实时记录机舱加速度信号a
x
,将机舱加速度信号a
x
作为加阻项引入收桨速率的调节中,在振动周期内变桨速率为与机舱加速度信号有关的正弦变化变速率收桨;
22.在变速率收桨的每一个变化周期n1内,变速率收桨遵循正弦分布规律,具体公式为:
[0023][0024]
其中,a表示x时刻机舱加速度变化值,a=a
停机-a
x
,0≤x≤n;
[0025]a停机
表示停机触发时的机舱加速度,a
x
表示实时的机舱加速度;ω表示风电机组停机触发时刻的给定的恒定变桨速率值,n表示塔筒振动周期。
[0026]
进一步,塔筒振动周期n与风电机组塔筒的一阶前后振动固有频率f有关,
[0027]
进一步,变速率收桨的速率变化周期n1与塔筒振动周期n的关系为:0.9n≤n1<1.1n。
[0028]
进一步,当叶片桨距角达到50
°
~60
°
后,收桨速率以恒定变桨速率ω或继续以变速率ω
变
进行收桨,直至叶片达到顺桨状态。
[0029]
进一步,恒定变桨速率ω的大小为:1deg/s≤ω≤8deg/s。
[0030]
与现有技术相比,本发明具有以下有益的技术效果:
[0031]
本发明公开了一种风电机组停机状态下的载荷控制方法,提出的发电机转矩调节方法是,停机指令触发时,随着机舱位移逐渐减小,发电机转矩逐渐增大,直至位移达到最小值;当机舱位移由最小值位置逐渐增大时,降低发电机转矩,依次循环往复,直至停机,目的是通过调节发电机转矩来减小机组的振动幅度,进而降低极限载荷的发生;同步的引入机舱加速度信号,同样可以起到抑制或减缓机组振动幅度的效果,实现载荷降低。本发明提出的载荷控制方法可以实现停机时变桨速率调节实时跟随机舱加速度变化,通过调节风轮的推力,可有效减弱风轮端的结构动态响应;负载端发电机转矩调节实时跟随机舱位移的变化,同样可以减弱机组的结构动态响应。
[0032]
进一步,引入机舱加速度信号,不同于传统的塔筒加阻的pi调节,本发明以塔筒一阶振动频率对应的振动周期为依据,在原给定停机变桨速率的基础上进行加速度余弦调节变桨速率,同样可以起到抑制或减缓机组振动幅度的效果,实现载荷降低。
附图说明
[0033]
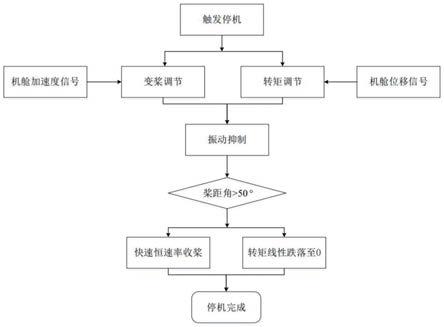
图1为本发明的一种风电机组停机状态下的载荷控制方法的流程图;
[0034]
图2为停机状态下机舱位移变化示意图;
[0035]
图3为本发明的变桨速率变化与原变桨速率变化对比示意图。
具体实施方式
[0036]
下面结合具体的实施例对本发明做进一步的详细说明,所述是对本发明的解释而不是限定。
[0037]
如图1所示,本发明公开了一种风电机组停机状态下的载荷控制方法,包括以下过程:在风电机组发生停机时,以当前机舱位移传感器的位移信号为基准,对停机过程中的发电机转矩进行调节;同时以当前机舱加速度信号对停机过程中的收桨速率进行调节。
[0038]
发电机转矩的调节过程为:如图2所示,停机指令触发时,随着机舱位移逐渐减小,发电机转矩逐渐增大,当发电机转矩达到允许最大转矩时,若机舱位移继续减小,保持发电机转矩恒定,直至机舱位移达到最小值;
[0039]
在随后的停机过程中,机舱位移开始反方向增大,此时发电机转矩反向减小,机舱位移在本周期内达到最大值时,发电机转矩停止减小;
[0040]
剩余停机周期内,按照s1和s2的方式调节发电机转矩,直至桨距角达到50
°
~60
°
后,发电机转矩在随后的停机时间内,由当前的发电机转矩给定值开始线性跌落至0。
[0041]
发电机转矩的调节公式为:
[0042]
t
变
=t
停机
(1+δ
·
d)
[0043]
其中,t
停机
为停机触发时的发电机转矩,d=d
停机-d
x
δ,d
停机
表示停机时刻的机舱位移值,d
x
停机过程中机舱实时位移值,δ表示调节增益。
[0044]
更优地,当采用查表法调节发电机转矩时,δ对应查表转矩对应的比例系数;
[0045]
当采用pi调节方式时,δ与比例环节kp和积分环节ki,d表示机舱位移误差,s为拉普拉斯算子,kp表示比例环节增益值,ki表示积分环节增益值。
[0046]
更优地,如图3所示,以当前机舱加速度信号对停机过程中的变桨速率进行调节的
具体过程为:
[0047]
风电机组停机触发时,记录机舱加速度信号a
x
,将机舱加速度信号a
x
作为加阻项引入收桨速率的调节中,在振动周期内变桨速率为与机舱加速度信号有关的正弦变化变速率收桨;
[0048]
在变速率收桨的每一个变化周期n1内,变速率收桨遵循正弦分布规律,具体公式为:
[0049][0050]
其中,a表示x时刻机舱加速度变化值,a=a-a
x
,0≤x≤n;a
x
表示实时的机舱加速度;ω表示风电机组停机触发时刻的恒定变桨速率,n表示塔筒振动周期。
[0051]
具体地,塔筒振动周期n与风电机组塔筒的一阶前后振动固有频率f有关,
[0052]
变速率收桨的速率变化周期n1近似等于塔筒振动周期n,0.9n≤n1<1.1n。
[0053]
更优地,当叶片桨距角达到50
°
~60
°
时,变桨速率以恒定变桨速率ω或继续以变速率ω
变
进行收桨,直至达到叶片达到顺桨状态。
[0054]
使用专业风力机载荷计算软件,计算出合适的恒定变桨速率ω的大小为:1deg/s≤ω≤8deg/s。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1