轻度混合系统的凸轮角度传感器错误的启动方法及装置与流程
轻度混合系统的凸轮角度传感器错误的启动方法及装置
1.相关申请的交叉引证
2.本技术要求2021年3月29日提交的韩国专利申请号10-2021-0040735的优先权,该申请的全部内容出于所有目的通过该引用结合于此。
技术领域
3.在一个方面,本公开涉及一种针对轻度混合系统的凸轮角度传感器错误的启动方法及装置,且更具体地,涉及一种针对轻度混合系统的凸轮角度传感器错误的启动方法及装置,该启动方法及装置被设计成为了在使用轻度混合启动机和发电机(mhsg)的48v轻度混合系统中由于两个凸轮角度传感器的错误而导致备份曲柄模式无法正常校正燃料喷射时间时启动失败做准备。
背景技术:
4.通常,在内燃机中,电子控制单元(ecu)基于来自凸轮角度传感器的信号确定适合于每个汽缸的操作条件的最佳燃料喷射时间,并在燃料喷射时间将燃料喷射到汽缸中。喷出的燃油与进气均匀混合,并通过活塞强力压缩点燃或通过气缸内的火花塞点燃,从而燃烧。
5.ecu基于来自凸轮角度传感器的信号来确定曲柄起动状态下的燃料喷射时间,并执行控制,以便在启动时能够在确定的燃料喷射时间喷射燃料,从而使内燃机成为可自行驱动的状态。作为参考,凸轮角度传感器是检测凸轮轴的旋转位置或旋转角度的传感器,并且在进气侧和排气侧的每个凸轮轴上设置一个凸轮角度传感器。
6.如上所述,凸轮角度传感器具有确定内燃机的启动能力、功率、运行效率等的非常重要的功能。如果在凸轮角度传感器中产生错误,无法准确地校正燃料喷射时间,则可能发生发动机失速。具体地,在启动中当燃料喷射时间不正确时,发动机状态无法转变为运行状态(在运行状态中,发动机在怠速每分钟转数下自行驱动),因此启动可能失败。
7.在现有技术中,用于准备由于这种凸轮角度传感器错误引起的启动失败的计划是备用曲柄逻辑。备用曲柄逻辑被编程以在两个凸轮角度传感器都产生错误时参考来自曲柄角度传感器的信号执行测试喷射,并确定燃料喷射时间已经校正,以及在测试喷射期间每分钟转数(rpm)增加时执行正常喷射。
8.但在启动时要求发动机rpm维持在200~250rpm,即12v启动马达的驱动rpm,才能正常运行逻辑。即,该逻辑执行测试喷射(在小增量地改变燃料喷射时间的同时喷射燃料),同时将发动机rpm保持在200~250rpm(即12v启动马达的驱动rpm)左右,并且在测试喷射期间检查rpm变化的同时校正燃料喷射时间。
9.然而,由于在普通的轻度混合系统中,轻度混合启动机和发电机(mhsg)驱动发动机的最大rpm高达1200rpm,大大超过现有12v启动马达的可用rpm范围(200~250rpm),因此存在一个问题,即当在凸轮角度传感器中产生错误时,无法正常使用这种现有的备用曲柄逻辑。
技术实现要素:
10.一方面,提供了一种针对轻度混合系统的凸轮角度传感器错误的启动方法和装置,该启动方法和装置能够在轻度混合系统用mhsg启动车辆时由于凸轮角度传感器错误而无法准确校正燃料喷射时间时,通过强制降低轻度混合启动机和发电机(mhsg)的rpm来正常使用现有的曲柄逻辑或控制器(通过执行大约200~250rpm的测试喷射来找出每个汽缸的燃料喷射时间的逻辑或控制器)。
11.一方面,
12.一种针对轻度混合系统的凸轮角度传感器错误的启动方法,其是在通过轻度混合系统的轻度混合启动机和发电机(mhsg)启动时,当凸轮角度传感器中存在错误时,能够正常使用现有的备用曲柄逻辑的方法,包括:
13.根据来自驾驶员的启动请求,确定是否尝试通过mhsg启动的步骤(a);
14.将曲柄起动结束时的发动机每分钟转数与使用mhsg启动时的预设参考每分钟转数进行比较的步骤(b);
15.当曲柄起动结束时的发动机每分钟转数超过参考每分钟转数时,确定紧接在启动后的发动机每分钟转数是否遵从怠速目标每分钟转数的步骤(c);
16.当产生了紧接在启动后的发动机每分钟转数未遵从怠速目标每分钟转数的不良遵从时,检查凸轮角度传感器中是否存在错误的步骤(d);
17.当在凸轮角度传感器中发现错误时,强制将发动机状态改变为曲柄起动的步骤(e);
18.当发动机状态改变为曲柄起动时,执行现有的备用曲柄逻辑,该备用曲柄逻辑降低mhsg的目标每分钟转数并且在使用来自曲柄角度传感器的信号执行测试喷射时找出燃料喷射时间的步骤(f);以及
19.确定发动机状态是否已经进入正常运行状态的步骤(g)。
20.当剩余电池容量足够并且通过mhsg执行启动时,参考每分钟转数可以是曲柄起动正常结束时的最小发动机每分钟转数。
21.在步骤(f)中,通过对mhsg的占空比控制以降低输出,可以将mhsg的目标每分钟转数降低到12v启动马达的可用每分钟转数范围。
22.根据本公开的一个方面的启动方法还可以包括步骤(h):当作为步骤(b)中的比较结果,在曲柄起动结束时的发动机每分钟转数未达到参考每分钟转数时,确定启动失败。
23.可以配置一种算法,当在步骤(h)中确定启动失败时,识别mhsg无法启动,通过12v启动马达再次尝试启动,并且当确定启动位失败时返回到步骤(a)。
24.当在步骤(g)中确定已经进入正常运行状态时,可以结束处理,并且当在步骤(g)中确定未进入正常运行状态时,可以将处理改变到步骤(h)。
25.当发动机每分钟转数是怠速目标每分钟转数或更高时,可以在步骤(g)中确定已进入正常运行状态。
26.在另一方面,提供了一种针对轻度混合系统的凸轮角度传感器错误的装置,包括:
27.轻度混合启动机和发电机(mhsg),被配置为使用来自高压电池的电力执行启动、或者通过使用发动机的输出产生电力来对高压电池充电;
28.启动马达,被配置成例如使用来自低压电池的电力来启动发动机;
29.凸轮角度传感器,被配置成检测凸轮轴的旋转位置或旋转角度;
30.曲柄角度传感器,被配置为检测曲柄轴的旋转位置或旋转角度;以及
31.控制器,被配置为基于来自凸轮角度传感器和曲柄角度传感器的输出来控制发动机的启动,
32.其中,控制器:在使用mhsg启动时,当曲柄起动结束时的发动机每分钟转数超过预设的参考每分钟转数时,确定紧接在启动后的发动机每分钟转数是否遵从怠速目标每分钟转数;当产生了紧接在启动后的发动机每分钟转数未遵从怠速目标每分钟转数的不良遵从时,检查凸轮角度传感器中是否存在错误;当在凸轮角度传感器中发现错误时,强制将发动机状态改变为曲柄起动;并且执行现有的备用曲柄逻辑,该备用曲柄逻辑降低mhsg的目标每分钟转数并且在使用来自曲柄角度传感器的信号执行测试喷射时找出燃料喷射时间。
33.启动马达适当地可以是12v或其他适当地配置成例如使用来自诸如12v电池的低压电池的功率来启动发动机的适当马达。
34.当剩余电池容量足够并且通过mhsg执行启动时,参考每分钟转数可以是在曲柄起动正常结束时的发动机每分钟转数。
35.当mhsg的目标每分钟转数降低时,通过对mhsg的占空比控制以降低输出,mhsg的目标每分钟转数可以降低到12v启动马达的可用每分钟转数范围。
36.当曲柄起动结束时的发动机每分钟转数未达到参考每分钟转数时,控制器可以确定启动已经失败,并且当启动已经失败时,可以通过12v启动马达重新尝试启动。
37.根据本公开的实施例,当由具有大扭矩的mhsg执行启动时,即使在凸轮角度传感器中产生错误,也可以正常使用现有的备用曲柄逻辑(通过执行200~250转左右的测试喷射来找出燃料喷射时间的逻辑),由此可以清楚地消除现有技术中当在凸轮角度传感器中产生错误时不通过mhsg实现启动的问题。
38.还提供了包括如本文所公开的装置和/或方法的车辆,包括乘用车、卡车或其他车辆。
39.如在本文中至少某些方面所述,术语“轻度混合”指的是包括能量存储系统(例如,可再充电能量存储系统)的混合系统,该能量存储系统无法提供足够的能量/功率来支持运输气候控制系统本身满负荷运行。
40.这种轻度混合系统可以不同于“完全混合系统”,该“完全混合系统”指的是包括能量存储系统(例如,可充电的能量存储系统)的混合系统,该能量存储系统可以能够提供足够的能量/功率来支持运输气候控制系统本身满负荷运行。
附图说明
41.本发明的上述和其它目的、特征和其它优点将从下面结合附图的详细描述中得到更清楚的理解,其中:
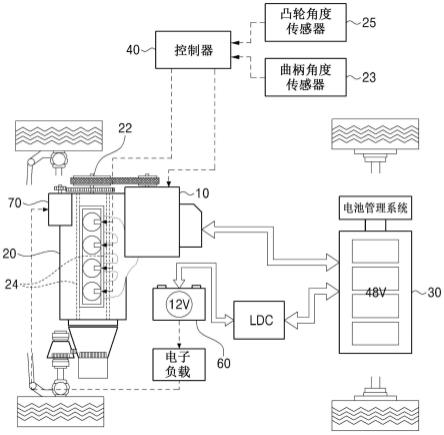
42.图1是示出根据本公开实施例的轻度混合系统的凸轮角度传感器错误的启动装置的配置的示意图;以及
43.图2是示出根据本公开实施例的轻度混合系统的凸轮角度传感器错误的启动方法的流程图。
具体实施方式
44.以下,参照附图详细描述本公开的示例性实施例。
45.本文使用的术语仅用于描述特定实施例的目的,而不旨在限制本公开。单数形式意在包括复数形式,除非上下文另有明确指示。
46.将进一步理解,在本说明书中使用的术语“包括”或“具有”指定所描述的特征、步骤、操作、组件、部分或其组合的存在,但不排除一个或多个其他特征、数字、步骤、操作、组件、部分或其组合的存在或添加。
47.本文使用的术语仅用于描述特定实施例的目的,并不旨在限制本公开。如在此所使用的,单数形式“一”、“一个”和“该”也意在包括复数形式,除非上下文明确另有指示。如在此使用的,术语“和/或”包括一个或多个相关列出的项目的任何和所有组合。在整个说明书中,除非明确相反地描述,否则“包括”一词和诸如“包含”或“含有”的变体将被理解为暗示包括所描述的元素,但不排除任何其他元素。
48.本说明书中使用的术语“第一”、“第二”等可用于描述各种组件,但组件不应被解释为限于术语。这些术语仅用于区分一个组件和另一个组件。
49.本文使用的术语“~器”、“~单元”、“~模块”等是指用于处理至少一个功能或操作的单元,并且可以通过硬件、软件或硬件和软件的组合来实现。
50.此外,本公开的控制逻辑可以被实现为计算机可读介质上的包含由处理器、控制器等执行的可执行程序指令的非短暂计算机可读介质。计算机可读介质的示例包括但不限于rom、ram、光盘(cd)-rom、磁带、软盘、闪存驱动器、智能卡和光学数据存储装置。计算机可读介质也可以分布在网络耦合的计算机系统中,以便计算机可读介质例如由远程信息处理服务器或控制器区域网络(can)以分布式方式存储和执行。
51.应当理解,本文使用的术语“车辆”或“车辆的”或其他类似术语包括一般的机动车辆,例如乘用车(包括运动型多用途车(suv)、公共汽车、卡车、各种商用车)、船只(包括各种船和轮船)、飞机等,并且包括混合动力车辆、电动车辆、插电式混合动力电动车辆、氢动力车辆和其他替代燃料车辆(例如源自石油以外的资源的燃料)。如本文所述,混合动力车辆是具有两个或更多个动力源的车辆,例如汽油动力车辆和电动动力车辆。
52.在下面参照附图的描述中,相同的部件被给予相同的附图标记,并且不重复描述。然而,在描述本公开时,将省略对公知技术的详细描述,以便不以不必要的细节模糊本公开的描述。
53.图1是示出根据本公开实施例的轻度混合系统的凸轮角度传感器错误的启动装置的配置的示意图。首先参照图1描述针对凸轮角度传感器错误的启动装置的结构。
54.参照图1,根据本公开的实施例的针对轻度混合系统的凸轮角度传感器错误的启动装置(start-up apparatus)包括轻度混合启动机和发电机(mhsg)10和12v启动马达70。mhsg 10通过皮带(或链条)连接到发动机曲柄轴22,以使用来自高压电池30的电力启动发动机20,或者使用发动机20的输出产生电力,且12v启动马达70使用来自低压电池60的电力启动发动机20。
55.低压电池可以在例如大约或小于100、90、80、70、60、50、40、30或20伏特的电压下工作,例如12v。在特定实施例中,低压电池26可以在12伏特的电压下工作。
56.本文所描述的高压电池可以在50伏特或更高的电压下工作,例如100、150、200、
250或300伏特或更高的电压。在一个实施例中,高压电池可以在300的高电压下工作。
57.低压电池可以是例如铅酸电池。高压电池可以是例如锂离子装置或其他适当的装置,但不限于采用电化学过程来存储电能以供车辆操作消耗,并且在某些实施例中可以具有接近300v dc的电压电平。
58.根据本公开实施例的针对轻度混合系统的凸轮角度传感器错误的启动装置包括凸轮角度传感器25和曲柄角度传感器23。凸轮角度传感器25设置在进气侧和排气侧的每一个凸轮轴24上,检测凸轮轴24的旋转位置或旋转角度,且曲柄角度传感器23检测曲柄轴22的旋转位置或旋转角度。
59.向控制器40提供凸轮角度传感器25和曲柄角度传感器23的检测信息,并且控制器40通过分析提供的检测信息(关于凸轮轴24和曲柄轴22的旋转位置或旋转角度的信息)来确定每个汽缸的最佳燃料喷射时间和点火时间。此外,控制器控制燃料喷射和火花塞,以便在确定的燃料喷射时间和点火时间喷射和点火燃料。
60.当发动机启动时,控制器40基于来自凸轮角度传感器25和曲柄角度传感器23的信号来确定适于曲柄起动(cranking)的燃料喷射时间和点火时间。控制燃料喷射和火花塞,使得燃料可以在确定的燃料喷射时间和点火时间喷射和点火,从而成为能够自行驱动发动机20的状态。
61.如果在凸轮角度传感器25中产生错误,则无法准确地校正燃料喷射时间,因此可能发生发动机失速。此外,当在启动中燃料喷射时间不正确时,发动机状态无法改变为运行状态(其中发动机在怠速rpm以上自行驱动),因此启动可能失败。在控制器40中编程备用曲柄逻辑以准备这种情况。
62.备用曲柄逻辑,如上述背景中所描述,是被编程为使用来自曲柄角度传感器23的信号执行测试喷射的逻辑。更详细地,备用曲柄逻辑被编程以在凸轮角度传感器25产生错误时参考来自曲柄角度传感器23的信号执行测试喷射,并确定燃料喷射时间已经拟合,并且在测试喷射期间每分钟转数(rpm)增加时执行正常喷射。
63.然而,需要在启动时将发动机rpm维持在200~250rpm,也就是12v启动马达70的驱动rpm,以便正常运行逻辑。即,要求在将发动机rpm维持在200~250rpm(即12v启动马达70的驱动rpm)左右的同时执行测试喷射(在小增量地改变燃料喷射时间的同时喷射燃料),并在检查测试喷射期间的rpm变化的同时校正燃料喷射时间。
64.然而,在普通的轻度混合系统中,轻度混合启动机和发电机(mhsg)驱动发动机的最大rpm高达1200rpm,大大超过了现有的12v启动马达70的可用rpm范围(200~250rpm)。因此,当凸轮角度传感器25中产生错误时,存在无法正常使用这样的现有的备用曲柄逻辑的问题。
65.为了解决该问题,根据本公开的实施例的轻度混合系统的凸轮角度传感器错误的启动装置被配置为当无法使用mhsg 10准确校正用于启动的燃料喷射时间时,强制将mshg的rpm降低到接近现有的备用曲柄逻辑(通过执行大约200~250rpm的测试喷射来找出燃料喷射时间的逻辑)的rpm。
66.为此,应用于本公开的控制器40可以具有一个或多个处理器,其由程序操作,以被构造为能够执行下面将逐步描述的一系列处理,以便能够检查凸轮角度传感器25是否在使用mhsg 10的启动中存在错误,并且在产生错误时通过强制降低mshg的rpm来正常使用现有
的备用曲柄逻辑。
67.控制器40可以包括处理器(第一处理器),该第一处理器包括使用mhsg 10确定在曲柄起动结束时的发动机rpm是否超过启动时的参考rpm的逻辑。此外,控制器40包括处理器(第二处理器),当曲柄起动结束时的发动机rpm超过参考rpm时,紧接在启动后的该第二处理器确定发动机rpm是否遵从预先设置的怠速目标rpm。
68.当剩余电池容量足够并且通过mhsg 10执行启动时,作为第一处理器确定出在曲柄起动结束时的发动机rpm的参考的参考rpm可以是曲柄起动正常结束时的最小发动机rpm。考虑到在假设剩余电池容量足够的情况下,mhsg 10在曲柄起动结束时至少超过800rpm,参考rpm可以设置为800rpm,但不限于此。
69.控制器40还包括:处理器(第三处理器),当产生了紧接在启动后的发动机rpm未遵从怠速目标rpm的不良遵从时,检查凸轮角度传感器25中是否存在错误;以及处理器(第四处理器),当作为检查凸轮角度传感器25中是否存在错误的结果,在凸轮角度传感器25中发现错误时,强制将发动机状态改变为曲柄起动。
70.第三处理器可以根据从施加到凸轮角度传感器25的测试信号中是否输出故障信号来检查凸轮角度传感器25中是否存在错误,并且第四处理器在逻辑上强制地将发动机状态改变为曲柄起动,因为在发动机20的状态一旦改变为运行之后,不能为每个ems设置不同的运行结束rpm。
71.当发动机rpm被第四处理器强制改变为曲柄起动时,mhsg 10的目标rpm被在控制器40所包括的另一处理器(第五处理器)降低到12v启动马达70的可用rpm范围,且然后执行现有的备用曲柄逻辑(在使用来自曲柄角度传感器23的信号执行测试喷射的同时找出燃料喷射时间)的工作。
72.通过对mhsg 10的占空比控制,可以实现将mhsg 10的目标rpm降低到现有12v启动马达70的可用rpm范围的工作。即,通过对mhsg 10的占空比控制来降低mhsg 10的输出,从而将mhsg 10的目标rpm降低到现有12v启动马达70的可用rpm范围(200~250rpm),并且控制器40通过这一系列处理最终确定发动机状态是否进入运行状态。
73.同时,当曲柄起动结束时的发动机rpm未达到参考rpm时,控制器40确定启动是否失败。当确定为启动失败时,通过12v启动马达70重试启动。此外,当作为确定发动机状态是否已经进入运行状态的结果,最终确定发动机状态已经正常地进入运行状态时,结束处理,或者如果不是这样,则将处理改变为确定启动是否失败的处理。
74.下面,参照图2的流程图更详细地描述根据本公开实施例的针对轻度混合系统的凸轮角度传感器错误由上述启动装置执行的发动机启动处理。为了便于描述,参照图1中所示的组件的附图标记来描述它们。
75.图2是示出根据本公开实施例的轻度混合系统的凸轮角度传感器错误的启动方法的流程图。
76.参照图2,根据本公开的实施例的针对轻度混合系统的凸轮角度传感器错误的启动方法是一种当在使用轻度混合系统的轻度混合启动机和发电机(mhsg)的启动中在营地角度传感器中产生错误时能够正常使用现有的备用曲柄逻辑的方法。启动方法以根据来自驱动器的启动请求确定是否通过mhsg尝试启动(s100)的步骤开始。
77.当在步骤s100中确定使用mhsg尝试启动作为确定结果时,执行将针对启动的曲柄
起动结束时的发动机rpm与预先设定的参考rpm进行比较的步骤(s200)。当剩余电池容量足够并使用mhsg执行启动时,参考rpm可以是曲柄起动正常结束时的最小发动机rpm(约800rpm)。
78.当作为步骤s200中的比较结果,曲柄起动结束时的发动机rpm超过参考rpm时,该方法进入确定紧接在启动后的发动机rpm是否遵从预先设置的怠速目标rpm的步骤(s300)。此外,当产生了紧接在启动后的发动机rpm未遵从怠速目标rpm的不良遵从时,检查凸轮角度传感器中是否存在错误(s400)。
79.如果在步骤s300中,紧接在启动后的发动机rpm遵从预先设置的怠速目标rpm,则意味着启动已经实现,没有特殊问题,因此过程不再进行,并在该步骤结束。此外,在还发现凸轮角度传感器正常操作时的状态下,不再进行处理并结束处理。
80.不太可能地,当产生了紧接在启动后的发动机rpm未遵从怠速目标rpm的不良遵从并且在凸轮角度传感器中也发现错误时,强制将发动机状态改变为曲柄起动(s500),并且执行降低mhsg的目标rpm和执行现有的备用曲柄逻辑(在使用来自曲柄角度传感器的信号执行测试喷射时找出燃料喷射时间)的步骤。
81.在步骤s600中,将mhsg的目标rpm降低到现有12v启动马达的可用rpm范围的工作可以通过对mhsg的占空比控制来实现。也就是说,通过对mhsg的占空比控制来降低mhsg的输出,可以将mhsg的目标rpm降低到12v启动马达的可用rpm范围(200~250rpm)(其中现有的备用曲柄逻辑可以正常使用)。
82.由于在步骤s600中执行现有的备用曲柄逻辑,因此当燃料喷射时间被准确校正时,发动机rpm增加并且发动机状态改变为运行状态。然而,在相反的情况下,发动机rpm并未增加。因此,通过监视通过执行现有的备用曲柄逻辑如何改变发动机rpm来确定发动机状态是否已经进入正常运行状态。
83.在步骤s700中,当通过执行现有的备用曲柄逻辑而使发动机rpm增加到怠速目标rpm以上时,表示燃料喷射时间被准确地校正并且进入了正常运行状态,因此结束处理。例如,当怠速目标rpm为800rpm,并且发动机rpm通过执行现有的备用曲柄逻辑变为800rpm或更高时,确定燃料喷射时间已经通过测试喷射被适当校正。
84.同时,作为上述步骤s200中的比较结果,当曲柄起动结束时的发动机rpm未达到参考rpm时,该处理进入确定启动是否失败的步骤(s210)。当在步骤s210中确定启动失败时,识别不可能通过mhsg启动,因此再次尝试使用12v启动马达启动(s230),且当确定启动未失败时,处理返回到步骤s100。
85.即使在步骤s700中发动机状态未进入正常运行状态(即使通过测试喷射,发动机rpm也没有达到怠速目标rpm),也可以构造算法来将处理改变到步骤s210。
86.当在凸轮角度传感器中产生错误,则无法准确地校正燃料喷射时间,因此可能发生发动机失速。此外,当在启动中燃料喷射时间不正确时,发动机状态不能改变为运行状态(发动机在怠速rpm以上自行驱动),因此启动可能失败。在控制器中编程备用曲柄逻辑以准备这种情况。
87.然而,需要在启动时将发动机rpm维持在200~250rpm,也就是12v启动马达的驱动rpm,以便正常运行备用曲柄逻辑。即,要求在将发动机rpm维持在200~250rpm(即12v启动马达的驱动rpm)左右的同时执行测试喷射(在小增量地改变燃料喷射时间的同时喷射燃
料),并在检查测试喷射期间的rpm变化的同时校正燃料喷射时间。
88.然而,由于,在普通的轻度混合系统中,轻度混合启动机和发电机(mhsg)驱动发动机的最大rpm高达1200rpm,大大超过了现有的12v启动马达70的可用rpm范围(200~250rpm),因此当凸轮角度传感器产生错误时,这种现有的备用曲柄逻辑不能正常使用。
89.然而,根据本公开的实施例,当由具有大扭矩的mhsg执行启动时,即使在凸轮角度传感器中产生错误,也可以正常使用现有的备用曲柄逻辑(通过执行200~250rpm左右的测试喷射来找出燃料喷射时间的逻辑),由此可以清楚地消除现有技术中当在凸轮角度传感器中产生错误时不通过mhsg实现启动的问题。
90.在上述详细描述中仅描述了特定实施例。本公开不应被解释为限于上述特定实施例,而应被解释为包括在权利要求书中定义的本公开的精神内的所有改变、等同物和替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1