一种航空发动机喷口面积控制的PID平衡位置补偿方法与流程
一种航空发动机喷口面积控制的pid平衡位置补偿方法
技术领域
1.本技术属于航空发动机控制技术领域,特别涉及一种航空发动机喷口面积控制的pid平衡位置补偿方法。
背景技术:
2.航空涡扇发动机全权限数控系统是发动机的重要组成部分,主要实现发动机的所有控制功能,保证发动机的稳态、动态性能指标。pid控制不仅是目前工业领域广泛使用的鲁棒性控制方法,在航空发动机各伺服控制回路中也是普遍采用pid方法进行闭环控制。
3.发动机喷口面积控制涉及状态多,气动载荷变化大,喷口面积控制的分油活门平衡位置ln在试车过程中会出现大幅度的变化,常规的pid控制中固定平衡位置补偿方式无法应对在试车过程分油活门实际平衡位置ln偏离较大的情况,从而出现喷口面积控制摆动的问题。而喷口面积摆动带来摆动n1,影响发动机的试车任务顺利开展;同时分油活门平衡位置ln偏差过大也会导致喷口动态调整速度变慢,从而影响收放喷口的速度。
4.图1为现有技术的喷口控制双闭环控制结构,虚线框为发动机电子控制器eec,d8dem为给定的喷口直径,也就是闭环控制的喷口直径期望值;deltd8为喷口直径期望值d8dem与喷口实际位置测量值d8之间的偏差,外环pid控制的理想目标就是让整个试车过程中偏差deltd8为0,此时喷口实际位置测量值d8的实际位置即为期望的位置。外环d8-ln的pid控制算法,根据偏差deltd8的大小计算分油活门位移ln的期望值lndem,内环的分油活门位移ln控制pid根据期望值lndem与分油活门实际位置ln测量值的偏差deltln进行闭环控制。外环喷口实际位置测量值d8的位置满足控制要求时,此时偏差deltad8约为0,那么外环pid控制分油活门保持在平衡位置上,计算分油活门位移ln处于平衡位置的物理含义即代表了“d8作动筒保持当前值不运动,既不增加也不减少”。实际上,在试车过程中,随着发动机状态、燃油系统工作状态以及负载的变化等因素的影响,平衡位置ln是变化的,因此,外环pid控制算法中,设置lnbalance固定参数估计分油活门平衡位置ln,试车时会出现偏差,大部分情况下这个偏差都是可以通过积分项进行补偿,不会带来问题。
5.现有d8-ln的pid控制算法采用图2所示的结构,其输入deltd8对应图1外环d8-ln的pid的输入,其输出为lndem。
6.图2中,u为控制项输出,由比例项u_kp、积分项u_ki、微分项u_kd的“求和”获得,控制项输出u再加上分油活门平衡位置ln的预估值lnbalance,经过饱和限幅作为内环给定lndem,如图所示,现有的pid控制采用的lnbalance为固定参数,当试车过成的平衡位置ln变化较大时,超出积分项u_ki补偿能力,会出现达到积分饱和限制的现象,会导致响应变慢,甚至出现参数摆动控制不稳。
技术实现要素:
7.本技术的目的是提供了一种航空发动机喷口面积控制的pid平衡位置补偿方法,以解决或减轻背景技术中的至少一个问题。
8.本技术的技术方案是:一种航空发动机喷口面积控制的pid平衡位置补偿方法,所述方法包括:
9.基于原有的pid控制方法进行控制;
10.构建在线修正参数dbalance和修正量lnbalance_g,使修正量lnbalance_g为固定修正量lnbalance与在线修正参数dbalance之和;
11.在原pid控制方法中通过使用修正量lnbalance_g更新替换固定修正量lnbalance进行pid控制,从而补偿平衡位置。
12.进一步的,当喷口位置处于极限位置时,不进行固定修正量lnbalance的更新。
13.进一步的,不进行固定修正量lnbalance修正的判断逻辑为:
14.条件一、当偏差deltd8》=0且d8》d8max-x,认为喷口处于大喷口边界,x代表边界区域的选取范围,例如可以取2,其值可调;
15.条件二、偏差deltd8《=0且d8《d8min+x,认为喷口处于小喷口边界,x代表边界区域的选取范围,例如也取2,其值可调;
16.条件一或条件2任一成立,则不应进行固定修正量lnbalance的修正。
17.进一步的,所述在线修正参数dbalance通过如下过程确定:
18.状态一、当积分项u_ki连续三个周期达到上边界限制项uki_up,且喷口不是处于大、小喷口边界时,固定修正量lnbalance的在线修正参数dbalance=uki_up*a;
19.状态二、当积分项u_ki连续三个周期达到下边界限制项uki_down,且喷口不是处于大、小喷口边界时,固定修正量lnbalance的在线修正参数dbalance=uki_down*a;
20.式中,a为调整参数。
21.进一步的,所述调整参数a取0.4-0.8之间。
22.进一步的,在非状态一和状态时,当前周期的在线修正参数dbalance等于前一周期的dbalance值。
23.本技术可以解决当出现喷口控制的ln分油活门平衡位置变化过大时,导致出现静差和摆动的问题,通过在线修正平衡位置进行补偿,改善控制品质,提升工作效率。
附图说明
24.为了更清楚地说明本技术提供的技术方案,下面将对附图作简单地介绍。显而易见地,下面描述的附图仅仅是本技术的一些实施例。
25.图1为现有技术的喷口控制结构图
26.图2为现有技术的外环d8-ln pid控制算法原理框图
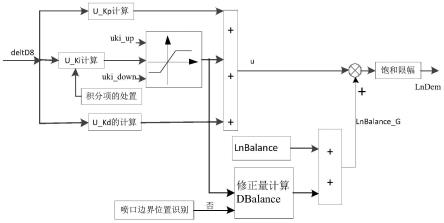
27.图3为本技术的pid逻辑修正的逻辑图
28.图4为本技术一实施例的加入dbalance修正的lnbalance_g仿真图。
29.图5为本技术一实施例的ln平衡位置预估偏离情况下d8仿真结果图。
具体实施方式
30.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。
31.发动机喷口面积控制的平衡位置ln在试车过程出现大幅度变化,且不同发动机存
在个体差异,导致试车过程现有pid控制方法采用lnbalance固定的方式无法补偿该变化的情况,进而出现控制响应慢、稳态时出现静差、甚至控制参数摆动的现象。
32.本方法识别分油活门平衡位置变化过大的现象,试车过程通过对lnbalance进行在线修正,来改善控制品质。同时记录状态标志字,识别出分油活门平衡位置偏差过大的现象,起到提示告警的作用。
33.1)分油活门ln的平衡位置修正逻辑
34.如图3所示的位置进行平衡位置修正逻辑,lnbalance_g=lnbalance+dbalance,以lnbalance_g代替原算法中的lnbalance,其中lnbalance为固定参数,dbalance为在线修正参数。
35.2)喷口位置识别的逻辑:
36.识别出喷口位置没有处于极限位置,因为当给定值d8dem和实际位置d8位于大喷口边缘或者小喷口边缘时,受机械位置限制时,此时可能会出现误积分从而出现积分饱和现象,这种情况不应进行lnbalance修正,应避免在此状态进行喷口平衡位置的修正。
37.2.1)deltd8》=0且d8》d8max-x,认为喷口处于大喷口边界,x代表边界区域的选取范围,例如可以取2,其值可调;
38.2.2)deltd8《=0且d8《d8min+x,认为喷口处于小喷口边界,x代表边界区域的选取范围,例如也取2,其值可调;
39.2.1或2.2成立,不应进行lnbalance修正。
40.3)lnbalance修正量/修正参数的计算逻辑
41.3.1)当积分项u_ki连续三个周期达到上边界限制项uki_up,且喷口不是处于大、小喷口边界时,lnbalance修正量dbalance=uki_up*a;
42.3.2)当积分项u_ki连续三个周期达到下边界限制项uki_down,且喷口不是处于大、小喷口边界时,lnbalance修正量dbalance=uki_down*a;
43.4)其余状态,当前周期修正量dbalance等于dbalance的前一周期值;
44.dbalance的要进行斜率限制,实现平衡位置修正的平稳过渡,限制修正量的斜率为b,避免在平衡位置修正时引入一个阶跃信号而造成干扰。
45.例如,lnbalance=-0.035,假设通过上述过程确定dbalance的值为0.02,dbalance的修正量经过0.5s的时间修正到位,则斜率b可以设定为0.02/0.5=0.04,b值越小,则修正的过程越平缓。
46.ki_up和uki_down分别为pid积分项的积分饱和上下边界,见图3。a为此算法的调整参数,通常可取0.4-0.8之间。
47.图4为本技术的改进算法lnbalance_g的仿真结果,初始为-0.035,在仿真过程406.9附近触发了修正功能,经过斜率限制到407.3s完成了对ln平衡位置的修正。
48.如图5所示本技术一实施例中的喷口调节面积为46cm-100cm,实线为d8给定值,短虚线为本技术的方法中d8的控制结果,用d8_a表示;长短线为原算法控制结果d8_b。仿真验证了当平衡位置变化比较大,积分项补偿不过来引起的摆动问题和控制静差问题,通过本技术的方法,摆动更快的收敛,且消除了控制静差。这里的控制静差指稳态时,d8实际位置与d8dem之间的偏差,具体效果对比如图5所示。
49.本技术可以解决当出现喷口控制的ln分油活门平衡位置变化过大时,导致出现静
差和摆动的问题,通过在线修正平衡位置进行补偿,改善控制品质,提升工作效率。
50.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1