考虑安装偏角的风力发电机组叶根载荷应变计标定计算方法与流程
1.本发明涉及风力发电机组机械载荷测试技术领域,特别涉及考虑安装偏角的风力发电机组叶根载荷应变计标定计算方法。
背景技术:
2.风电机组的叶片是将风能吸收并转换为机械能的部件,是风力发电机组中最为关键的零部件之一。由于叶片根部作为外部弯矩作用最为显著的区域,通常对叶片载荷的测量是在叶片根部进行的。风电机组叶根弯矩的测试包括叶根挥舞弯矩与摆振弯矩的测试。叶根载荷测试传感器一般采用电阻应变计,并建立全电桥电路对挥舞和摆振弯矩分别进行测量。
3.现有技术中,针对叶片载荷测量摆振与挥舞方向产生信号串扰的问题,iec 61400-13提供了一种标定修正方法,该方法认为叶片载荷测量中的信号串扰不可忽略,实际的摆振弯矩与挥舞弯矩并非只与各自对应的载荷信号相关,即摆振弯矩在与摆振载荷信号建立关联时同时需要考虑挥舞载荷信号的影响,而挥舞弯矩在于挥舞载荷信号建立关联时需要考虑摆振载荷信号的影响。最终通过一系列的矩阵变换,可以得出标定方程中的标定系数与偏移量。通过以上方法得到的标定方程有时并不能很好地消除串扰带来的影响,从而对载荷计算产生影响。这是因为不同机组使用的叶片不同,合模缝附近不稳定应力的局部区域大小也不同,而应变计安装偏角θ往往依靠经验确定,并无统一定论。针对以上问题,机组叶片应变信号标定计算过程中应将应变计安装偏角考虑在内。
4.例如,一种在中国专利文献上公开的“一种基于fbg的风机叶片载荷测量方法及应用”,其公告号:cn112665766a,其申请日:2020年12月19日,该发明利用叶片等效刚性系数矩阵、传感器组输出波长变化值和叶片浆距角所对应的载荷值三者之间的映射关系,得到标定后的叶片等效刚性系数矩阵具体值,实时测量传感器组输出波长变化值,利用标定后的叶片等效刚性系数矩阵具体值、叶片的初始载荷值和传感器组输出波长变化值得到叶片的实时载荷值,但是存在标定计算中未考虑叶根应变计的安装偏角,叶根载荷量与实际数据有差异的问题。
技术实现要素:
5.针对现有技术标定计算中未考虑叶根应变计的安装偏角,叶根载荷量与实际数据有差异的不足,本发明提出了考虑安装偏角的风力发电机组叶根载荷应变计标定计算方法,在标定计算中将叶根应变计的安装偏角考虑在内,通过对实测载荷信号的分解合成,使换算得到的叶根载荷量更为贴近实际。
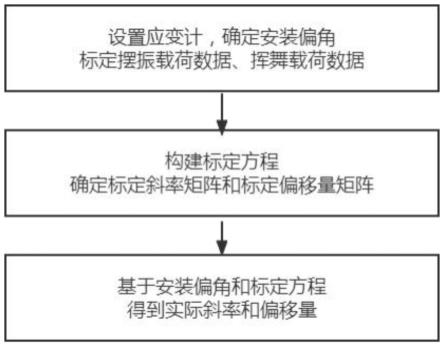
6.以下是本发明的技术方案,考虑安装偏角的风力发电机组叶根载荷应变计标定计算方法,包括以下步骤:
7.s1:设置应变计,确定安装偏角,标定摆振载荷数据、挥舞载荷数据;
8.s2:构建标定方程,确定标定斜率矩阵和标定偏移量矩阵;
9.s3:基于安装偏角和标定方程,得到实际斜率和偏移量。
10.本方案中,设置应变计,确定安装偏角,标定摆振载荷数据、挥舞载荷数据,构建标定方程,确定标定斜率矩阵和标定偏移量矩阵,基于安装偏角和标定方程,得到实际斜率和偏移量,在标定计算中将叶根应变计的安装偏角考虑在内,通过对实测载荷信号的分解合成,使换算得到的叶根载荷量更为贴近实际。
11.作为优选,应变计安装于桨叶根圆柱段的内壁上,四个测点均布于桨叶根圆柱段圆截面的四等分点上。
12.本方案中,应变计安装于桨叶根圆柱段的内壁上,四个测点均布于桨叶根圆柱段圆截面的四等分点上,便于应变计对叶根挥舞弯矩和叶根摆振弯矩进行测量。
13.作为优选,不相邻的两个应变计的连线互相垂直。
14.本方案中,为了避开局部应力十分不稳定的合模缝区域,第二应变计、第四应变计在布置时与摆振方向存在一个安装偏角,同时为了降低串扰带来的影响,第一应变计、第三应变计在布置时二者连线需与第二应变计、第四应变计的连线保持垂直,即第一应变计、第三应变计的连线与挥舞方向存在相同的安装偏角。
15.作为优选,标定时风力发电机组处于停机状态,风轮自由转动的最小周数为三周。
16.本方案中,标定时风力发电机组处于停机状态,风轮自由转动的最小周数为三周,提高标定时应变计的测量精度。
17.作为优选,标定时共三片桨叶,一片桨叶桨距角为0度,另一片桨叶桨距角为90度,第三片桨叶桨距角设定为0到90度的任意值。
18.本方案中,桨距角为90度的桨叶挥舞方向完全暴露在重力作用下,桨距角为0度的桨叶摆振方向完全暴露在重力作用下,提高标定时应变计的测量精度。
19.作为优选,标定时风速为3-4m/s。
20.本方案中,标定时风速为3-4m/s,提高标定时应变计的测量精度。
21.作为优选,标定方程如下:
[0022][0023]
上式中,se与sf分别为摆振与挥舞方向上的载荷信号,m
be
与m
bf
为标定得到的载荷量,初始标定斜率矩阵,初始标定偏移量矩阵。
[0024]
作为优选,初始标定斜率的算式如下:
[0025][0026][0027]
αe、αf为机舱仰角,βe、βf为叶片锥角,为空转过程中摆振载荷信号的平均值,为空转过程中挥舞载荷信号的平均值,slopee、slopef为初始标定斜率。
[0028]
作为优选,由于安装偏角的存在,桨叶叶根摆振弯矩me实际上为标定载荷量m
be
与mbf
在摆振方向上的投影矢量和;同理桨叶叶根挥舞弯矩mf实际上为标定载荷量m
be
与m
bf
在挥舞方向上的投影矢量和,表达式如下:
[0029]
me=m
be
·
cosθ+m
bf
·
sinθ,
[0030]
mf=-m
be
·
sinθ+m
bf
·
cosθ,
[0031]
结合标定方程,得出下式:
[0032][0033]
上式中,se与sf分别为摆振与挥舞方向上的载荷信号,m
be
与m
bf
为标定得到的载荷量,slopee、slopef为初始标定斜率,offsete、offsetf为初始标定偏移量。
[0034]
本方案中,根据安装偏角、摆振载荷数据和挥舞载荷数据求出斜率和偏移量。
[0035]
本发明的有益效果是:在标定计算中将叶根应变计的安装偏角考虑在内,通过对实测载荷信号的分解合成,使换算得到的叶根载荷量更为贴近实际;当采用iec61400-13提供的不考虑安装偏角的标定方法进行计算时,本方法可以用于验证iec方法计算得到的标定系数是否有误。若iec方法计算得到的标定系数与通过本方法计算得到的标定系数基本相近,则使用iec方法计算得到的标定结果可以用于后续的载荷分析。
附图说明
[0036]
图1本发明考虑安装偏角的风力发电机组叶根载荷应变计标定计算方法的流程图。
[0037]
图2本发明考虑安装偏角的风力发电机组叶根载荷应变计标定计算方法的叶根应变计安装示意图。
[0038]
图3本发明考虑安装偏角的风力发电机组叶根载荷应变计标定计算方法的叶根应变计安装侧视图。
[0039]
图4本发明考虑安装偏角的风力发电机组叶根载荷应变计标定计算方法的标定测试过程中三只桨叶桨距角的示意图。
[0040]
图5本发明考虑安装偏角的风力发电机组叶根载荷应变计标定计算方法的标定过程单片桨叶叶根摆振与挥舞弯矩载荷信号随风轮方位角的变化情况示意图。
[0041]
图6本发明考虑安装偏角的风力发电机组叶根载荷应变计标定计算方法的实测载荷信号的分解合成示意图。
[0042]
图7本发明考虑安装偏角的风力发电机组叶根载荷应变计标定计算方法的详细流程图。
具体实施方式
[0043]
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
[0044]
实施例:如图1至图7所示,考虑安装偏角的风力发电机组叶根载荷应变计标定计算方法,包括以下步骤:
[0045]
s1:设置应变计,确定安装偏角,标定摆振载荷数据、挥舞载荷数据。
[0046]
s2:构建标定方程,确定标定斜率矩阵和标定偏移量矩阵。
[0047]
s3:基于安装偏角和标定方程,得到实际斜率和偏移量。
[0048]
如图2和图3所示,用于测量叶根弯矩的应变计安装在桨叶根部圆柱段的内壁上,同时四个测点均布于叶根圆柱段圆截面的四等分点上。其中第一应变计与第三应变计组全桥对叶根挥舞弯矩进行测量,第二应变计与第四应变计组全桥对叶根摆振弯矩进行测量。如图2所示,为了避开局部应力十分不稳定的合模缝区域,第二应变计、第四应变计在布置时与摆振方向存在一个安装偏角θ,同时为了降低串扰带来的影响,第一应变计、第三应变计在布置时二者连线需与第二应变计、第四应变计的连线保持垂直,即第一应变计、第三应变计的连线与挥舞方向存在相同的安装偏角θ。在实际测试中,风电机组的三片叶片叶根均会布置以上应变计用于叶根载荷测量。
[0049]
应变计安装布置完毕后,在风电机组修改主控程序后,在机组停机模式下对不同桨叶的桨距角大小进行调节,从而使风轮空转,进而对叶根摆振及挥舞弯矩进行标定,风轮空转指的是风力发电机组在停机状态下风轮自由转动的过程,标定过程中风轮空转的最小周数为三周。标定测试需要在小风条件下进行,风速为3-4m/s。如图4所示,第一桨叶并未开桨,即桨距角为90
°
。第二桨叶与第三桨叶则分别开桨至30
°
与0
°
。当风轮开始转动时,第一桨叶挥舞方向完全暴露在重力作用下,而第三桨叶摆振方向完全暴露在重力作用下。当风轮缓慢旋转三周后,完成第一桨叶挥舞方向与第三桨叶摆振方向载荷信号标定测试。按照同样的方法,最终完成第一桨叶、第二桨叶和第三桨叶挥舞与摆振方向的载荷信号标定测试。
[0050]
标定测试中三片桨叶中一片桨叶桨距角必须为0度,另一片桨叶桨距角必须为90度,第三片桨叶可以设定为0到90度的任意值。
[0051]
标定过程中也可以通过修改机组控制程序,将机组切入风速参数改小,使风电机组在小于切入风速时启动,此时三只桨叶桨距角均处于0
°
位置,同时完成三只桨叶叶根摆振方向载荷信号的标定。在风轮缓慢旋转三周后,手动停机并恢复参数。
[0052]
s2:构建标定方程,确定标定斜率矩阵和标定偏移量矩阵。
[0053]
标定过程中单片桨叶叶根摆振与挥舞弯矩载荷信号波形类似于正弦函数。通过提取所有桨叶载荷信号波形中的最大值与最小值,计算出每只桨叶在空转过程中摆振载荷信号的平均值挥舞载荷信号的平均值
[0054]
初始标定方程如下:
[0055][0056]
上式中,se与sf分别为摆振与挥舞方向上的载荷信号,m
be
与m
bf
为标定得到的载荷量,初始标定斜率矩阵,初始标定偏移量矩阵。
[0057]
当风轮空转若干周后,se与sf将会得到类似正弦函数的信号波形。
[0058]
slopee与slopef通过计算得到,算式如下:
[0059]
[0060][0061]
上式中,fe、ff为叶片在质心位置处产生的重力(fe=ff),le、lf为叶片质心与贴片位置之间的间距(le=lf),αe、αf为机舱仰角(αe=αf),βe、βf为叶片锥角(βe=βf)。为空转过程中摆振载荷信号的平均值,为空转过程中挥舞载荷信号的平均值,slopee、slopef为初始标定斜率。
[0062]
offsete等于-slopee与风轮空转一周过程中摆振弯矩信号最大值与最小值的差值的乘积。由于风轮至少空转了三周,offsete应取均值。
[0063]
同理,offsetf等于-slopef与风轮空转一周过程中挥舞弯矩信号最大值与最小值的差值的乘积。由于风轮至少空转了三周,offsetf应取均值。
[0064]
s3:基于安装偏角和标定方程,得到实际斜率和偏移量。
[0065]
由于安装偏角θ的存在,桨叶叶根摆振弯矩me实际上为标定载荷量m
be
与m
bf
在摆振方向上的投影矢量和;同理桨叶叶根挥舞弯矩mf实际上为标定载荷量m
be
与m
bf
在挥舞方向上的投影矢量和。表达式如下:
[0066]
me=m
be
·
cosθ+m
bf
·
sinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0067]
mf=-m
be
·
sinθ+m
bf
·
cosθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0068]
将式(4)和(5)式改写为矩阵形式,表达式如下:
[0069][0070]
将式(1)代入式(6),得到式(7),如下:
[0071][0072]
进一步简化得到式(8):
[0073][0074]
根据式(7)和(8),计算得出斜率和偏移量:
[0075]k11
=cosθ
·
slopeeꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0076]k12
=sinθ
·
slopefꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0077]k21
=-sinθ
·
slopeeꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0078]k22
=cosθ
·
slopefꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0079]
offsete=cosθ
·
offsete+sinθ
·
offsetfꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0080]
offsetf=-sinθ
·
offsete+cosθ
·
offsetfꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0081]
在标定计算中将叶根应变计的安装偏角考虑在内,通过对实测载荷信号的分解合成,使换算得到的叶根载荷量更为贴近实际;当采用iec61400-13提供的不考虑安装偏角的标定方法进行计算时,本方法可以用于验证iec方法计算得到的标定系数是否有误。若iec方法计算得到的标定系数与通过本方法计算得到的标定系数基本相近,则使用iec方法计算得到的标定结果可以用于后续的载荷分析。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1