一种运动阻力矩自平衡式潮流能水轮机及其转速调节方法
1.本发明涉及水轮机,具体是涉及一种运动阻力矩自平衡式潮流能水轮机及其转速调节方法。
背景技术:
2.潮流能是一种不消耗燃料、不污染环境、不受枯水或洪水影响、用之不竭的再生能源,潮流能开发一次能源和二次能源相结合,不受一次能源价格的影响。在海洋各种能源中,潮流能的开发利用最为简便,因此对于其的利用受到各界广泛的关注,主要是可以进行发电,潮流能发电的原理是海水在太阳和月球的引力下产生的周期性的往复运动,依靠高、低潮位之间形成的落差,推动水轮机实现旋转,从而带动发电机发电。利用潮流能源发电是—种有效、安全可靠、具有高稳定性、不易受外界因素影响的清洁发电方式,不但能够弥补日常使用电量的不足和节约日益枯竭的宝贵资源,还有利于保护人类赖以生存的环境,所以世界各国对于潮流能研究一直如火如荼。
3.在水轮机发电过程中,叶尖浸没水深以及叶尖速比是的两个重要参数,根据叶轮能量利用率随着叶尖浸没水深以及叶尖速比的变化规律,可以确定水轮机安装水深、控制水轮机转速,使得水轮机始终保持最高能量利用率。现有技术中,专利申请号为201310685130.9,名称为“可沉降式潮流能水轮机”的中国专利,主动调节水轮机所处水深,当水位变化时难以实现自动调节。专利申请号为202111292712.1,名称为“一种主被动平衡式漂浮型水轮机实验装置及其主动平衡控制”的中国专利,采用平面四连杆原理,主动调节水轮机水深,但是水轮机在垂直面内升降,将改变水轮机轴线到实验装置几何中心的距离,使得在实验过程中,水轮机不仅形成阻力,而且对装置形成阻力矩,即俯仰力矩,容易造成应力集中,不利于水轮机的升降。专利申请号为201811281428.2,名称为“一种自平衡的潮流能发电装置”,以及专利申请号为200810249755.x,名称为“升降式双浮体潮流发电机”的中国专利采用被动平衡方式调节水轮机所处水深,通过在水仓中注水和排水,实现水轮机实验装置整体的下沉和上浮,从而实现水轮机所处水深的调节。但是该种调节方式,将改变实验装置的整体迎水面,不仅增加了实验装置水中运行阻力,而且容易形成额外的阻力矩。专利申请号为201710810447.9,名称为“一种水平轴潮流能水轮机水动力性能试验平台及测试方法”的中国专利,通过手工调节电阻箱的方式调节水轮机转速,难以根据装置的实时运行速度进行水轮机转速在线自动调节。
技术实现要素:
4.发明目的:针对以上缺点,本发明提供一种始终保持最佳能量利用率的运动阻力矩自平衡潮流能水轮机。
5.本发明还提供一种运动阻力矩自平衡潮流能水轮机的转速调节方法。
6.技术方案:为解决上述问题,本发明采用一种运动阻力矩自平衡式潮流能水轮机,包括水轮机本体、安装水轮机本体的固定框架、调节固定框架深度的深度调节装置、调节水
轮机本体叶轮转速的转速调节装置,所述深度调节装置包括对称设置于固定框架上下两端的上移动平台和下移动平台、调节上移动平台和下移动平台靠近或远离固定框架的深度驱动装置,所述上移动平台为固定框架提供浮力,所述下移动平台为固定框架提供重力;所述转速调节装置包括调阻电机、调阻丝杆和设置于调阻丝杆上的调阻螺母,所述调阻电机带动调阻丝杆转动,调阻丝杆转动带动调阻螺母移动,调阻螺母在调阻丝杆上移动改变接入水轮机本体的电阻,从而改变水轮机本体叶轮的转速。
7.上移动平台连接浮力块,上移动平台通过深度驱动装置实现上移动平台的伸展和收缩。因为水轮机整体的浮力和重力没有发生变化,所以在上移动平台伸展后水轮机整体的外部尺寸高度增大,中心水轮机本体相对于水面的深度也会相应的增大,因此能够调节水轮机的深度。
8.进一步的,所述深度驱动装置包括剪叉机构、与剪叉机构活动端固定连接的齿条、与齿条啮合的齿轮,所述上移动平台和固定框架上端面之间、下移动平台和固定框架下端面之间均设置剪叉机构,齿轮转动带动齿条移动,齿条移动带动剪叉机构活动端移动,从而带动上移动平台和下移动平台靠近或远离固定框架。
9.进一步的,所述深度驱动装置包括驱动电机、传动轴,所述传动轴竖直穿过固定框架,且传动轴两端分别与固定框架上下端面的两个齿轮固定连接,所述驱动电机输出端固定设置驱动齿轮,驱动齿轮与固定框架上下端面两个齿轮的其中一个啮合,通过传动轴使得一个驱动电机驱动两个剪叉机构工作。
10.进一步的,所述固定框架上下端面均设置燕尾槽,所述齿条在燕尾槽内滑动,齿条一端通过连杆与剪叉机构活动端连接。
11.进一步的,所述水轮机本体外套设导流罩,导流罩与固定框架固定连接,水轮机本体设置于固定框架中心。
12.进一步的,所述固定框架四角分别设置调速舱、电子舱、左电力舱、右电力舱,所述调速舱内设置转速调节装置,所述电子舱内设置水轮机的控制系统,用于实时调节水轮机姿态、转速;所述左电力舱和右电力舱用于电力的存储和供给。
13.进一步的,所述固定框架两侧分别设置沿竖直方向延伸的滑轨立柱,且滑轨立柱位于水轮机本体迎水面的两侧,所述固定框架两侧固定设置有滑轮,滑轮沿滑轨立柱滑动。
14.本发明还采用一种运动阻力矩自平衡潮流能水轮机的转速调节方法,包括以下步骤:
15.步骤1:检测潮流实际运动速度v
实际
;
16.步骤2:根据叶轮能量利用率与叶尖速比之间的关系得到叶轮最高能量利用率时的最佳叶尖速比λ;
17.步骤3:根据得到的最佳叶尖速比得到水轮机本体的目标转速n
目标
;
18.步骤4:根据水轮机本体转速与接入水轮机本体的电阻之间的关系,控制转速调节装置调节调阻螺母,改变接入水轮机本体的电阻,从而改变水轮机本体的转速,使水轮机本体的转速达到目标转速;
19.步骤5:实时检测潮流实际运动速度,根据检测的潮流实际运动速度实时对水轮机本体转速进行调节。
20.进一步的,所述步骤4中具体包括:
21.步骤41:根据水轮机机械传输特性有:
[0022][0023][0024]
tm=cmφi
[0025][0026][0027]
其中,jr为水轮机本体传动系统折合到水轮机主轴的惯量,wr为水轮机主轴转动角速度,tr为水轮机本体所获得的水动力矩,tm为电磁转矩,td为阻尼力矩,r为水轮机叶轮半径,cm为转矩常数,φ为磁通,i为回路中电流,e为感应电势,ra为调阻装置接入电阻的阻值,ce为电势常数,cn为阻尼系数;
[0028]
得到水轮机本体转速与接入水轮机本体的电阻之间的关系:
[0029][0030]
通过检测的潮流实际运动速度v
实际
与最佳叶尖速比λ表示目标转速n
目标
则有:
[0031][0032]
步骤42:计算调阻螺母目标位移l
目标
:
[0033][0034]
则有:
[0035][0036]
其中,l
总
为调节电阻总长度,r
总
为调节电阻总阻值;
[0037]
步骤43:控制调阻电机驱动调阻丝杠转动控制调阻螺母位移,再通过位移传感器监测调阻螺母位移数据,根据调阻螺母位移数据再控制调阻电机,形成闭环控制,最终使得调阻螺母位移为l
目标
。
[0038]
有益效果:本发明相对于现有技术,其显著优点是在当前水轮机工作环境不适宜时,通过上移动平台和下移动平台的伸展和收缩,可以在预定的范围内进行深度调节,进而
改变叶尖到水面的距离,选择水轮机合适的工作环境,通过上移动平台和下移动平台的伸展和收缩调节深度,减少深度调节的驱动能源,从而降低能源的消耗。对称设置的上移动平台和下移动平台能够平衡水轮机在所处水深调节时所形成的运行阻力矩。且当顶部浮力块受到波浪、紊流干扰而产生俯仰力矩时,与之对称的尾部重力块能够产生一个反向力矩,来抵消顶部的俯仰力矩,从而实现水轮机阻力自平衡。当流量较小时,调节调速电阻增大,电路中电流减小,水轮机运行阻力减小,转速增大;在流量较大时,调节调速电阻减小,电路中电流增大,水轮机运行阻力增大、转速减小,根据实时潮流速度,在线调节水轮机转速,从而保证水轮机运行稳定,始终工作在最佳叶尖速比,保持最高能量转化效率。
附图说明
[0039]
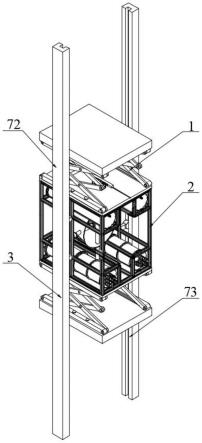
图1是本发明水轮机的整体结构示意图;
[0040]
图2是本发明水轮机收缩状态的主视图;
[0041]
图3是本发明上移动平台伸展状态的结构示意图;
[0042]
图4是本发明上移动平台伸展状态的左视图;
[0043]
图5是本发明上移动平台伸展状态的主视图;
[0044]
图6是图5中a-a处剖视图;
[0045]
图7是图5齿条滑槽处局部放大视图;
[0046]
图8是图6滑槽连接处局部放大视图;
[0047]
图9是图6齿条连接处局部放大视图;
[0048]
图10是本发明中间主体结构主视图;
[0049]
图11是本发明中间主体结构左视图;
[0050]
图12是图10中b-b处剖视图;
[0051]
图13是本发明中调速舱整体结构示意图;
[0052]
图14是本发明中调速舱内部结构视图;
[0053]
图15是本发明中调速舱固定模块结构视图;
[0054]
图16是本发明中调阻模块结构视图;
[0055]
图17是本发明中调阻模块俯视图;
[0056]
图18是图17中c-c处剖视图;
[0057]
图19是图17中d-d处剖视图;
[0058]
图20是本发明中下移动平台的结构示意图;
[0059]
图21是本发明中调节水轮机叶尖浸没水深的工作原理图;
[0060]
图22是本发明中调节水轮机转速工作原理图;
[0061]
图23是本发明水轮机的受力分析图;
[0062]
图24是本发明中上移动平台结构尺寸关系示意图;
[0063]
图25是本发明中发电机电气回路原理图;
[0064]
图26是本发明中转速调节装置控制流程图。
具体实施方式
[0065]
实施例1
[0066]
如图1、图2所示,本实施例中一种运动阻力矩自平衡潮流能水轮机,包括左立柱72、右立柱73、滑轮74、上移动平台1、中间主体2和下移动平台3。其中,中间主体2包括固定框架4、调速舱5、电子舱6、左电力舱9、右电力舱10和水轮机模块8。上移动平台1通过螺栓与固定框架4上端面固定在一起,固定框架4内安装有调速舱5、电子舱6、左电力舱9、右电力舱10和水轮机模块8,下移动平台3通过螺栓与固定框架4下端面固定在一起。
[0067]
如图3至图5所示,上移动平台1主要包括浮力材料11、上剪叉机构、固定底板a24、上齿条25、电机26、上齿轮27和上连杆28;上剪叉机构包括左固定架a12、左上x型杆a13、左上x型杆b14、左上x型杆c15、左上x型杆d16、左固定架b17、右固定架a18、右上x型杆a19、右上x型杆b20、右上x型杆c21、右上x型杆d22、右固定架b23。固定底板a24两侧分别开有三个螺纹孔,通过螺栓使左固定架b17和右固定架b23固定在固定底板a24上。左上x型杆c15和左上x型杆d16中间开有通孔通过销轴连接组成一级x型机构,左上x型杆a13和左上x型杆b14同样通过销轴组成一级x型机构,两组一级机构通过销轴连接共同组成一个二级x型机构,二级x型机构中左上x型杆c15通过销轴和挡圈固定在左固定架b17上,左上x型杆d16则通过销轴与上连杆28相连,并安装在左固定架b17的滑槽内;二级x型机构中左上x型杆a13通过销轴和挡圈与左固定架a12相连接,左上x型杆b14则通过轴安装在左固定架a12中的滑槽内;同理,右上x型杆a19、右上x型杆b20、右上x型杆c21和右上x型杆d22由销轴共同组成二级x型机构,并同样安装在右固定架b23和右固定架a18上。浮力材料11两侧开有通孔,通过螺栓螺母安装在左固定架a12和右固定架a18上。
[0068]
图6至图9所示,上移动平台1上驱动电机26通过螺丝连接安装在固定底板a24底部,上齿轮27与驱动电机26相互啮合,且上齿轮27通过挡圈与螺母固定在传动轴32上,上齿轮27同时与上齿条25相互啮合,上齿条25下端安装在固定底板a24上的燕尾槽内,并通过螺栓与上连杆28固定在一起。
[0069]
如图10至图12所示,中间主体2包括固定框架4、调速舱5、电子舱6、左电力舱9、右电力舱10和水轮机模块8。其中固定框架4的四个角内分别固定有调速舱5、电子舱6、左电力舱9和右电力舱10,并且固定框架4中心安装有水轮机模块8。
[0070]
水轮机模块8主要由水轮机本体30、水轮机固定板31、传动固定套筒33、导流罩29、水轮机固定杆a34和水轮机固定杆b35共同组成。其中,水轮机本体30通过螺栓螺母固定安装在水轮机固定板31上,而水轮机固定板31则通过水平方向上的水轮机固定杆a34和水轮机固定杆b35通过螺栓固定连接在固定框架4上。导流罩29上开有对称的四个通孔,水轮机固定杆a34和水轮机固定杆b35则通过水平通孔使水轮机固定在导流罩29中心,而固定套筒33则通过竖直通孔使导流罩29完全固定。固定套筒33内部安装有传动轴32,传动轴32上下安装有上齿轮27和下齿轮,通过轴肩和螺母固定安装。电机26的转动带动上齿轮27旋转,传动轴32随上齿轮27旋转将带动下齿轮一同旋转,由此同步驱动上移动平台1和下移动平台3的同步伸展和收缩。
[0071]
如图13、图14所示,调速舱5主要包括后密封端盖36、后法兰37、舱筒38、前法兰39、前密封端盖40、调速舱后固定模块41、调阻模块42(转速调节装置)和调速舱前固定模块43。后密封端盖36通过螺栓螺母与后法兰37一同安装在舱筒38上,且相互之间装有o型圈密封;前密封端盖40和前法兰39也同样与舱筒38连接使用密封圈来保证密封性。
[0072]
如图15所示,调速舱后固定模块41和调速舱前固定模块43完全相同,同样包括固
定板a44、l连接件45、连接轴46、固定板b47、固定板c48、固定板d49。固定板a44和固定板d49四周开有通孔,通过四根连接轴46配合螺母共同固定在一起。固定板c48后端通过四个l连接件45和螺栓螺母安装在固定板a44和固定板d49之间;固定板b47通过同样的方式安装在固定板a44和固定板d49之间。
[0073]
如图16至图19所示,调阻模块42主要包括调阻电机50、调阻齿轮51、限位杆a52、限位杆b53、调节电阻54、调阻丝杠55、调阻板56和调阻螺母57。调阻电机50通过螺钉安装在调阻板56上,调阻板56上有前后两处凸出结构,用于安装调阻丝杠55,调阻丝杠55前后两端轴向定位通过轴肩和轴端挡圈固定,在调阻丝杠55后端处安装有调阻齿轮51通过轴端挡圈、轴肩和平键进行定位。调阻丝杠55上安装有调阻螺母57,且通过安装在调阻板56上的限位杆a52和限位杆b53来限制调阻螺母57的周向运动,以达到调阻螺母57的轴向运动。
[0074]
如图20所示,下移动平台3包括固定底板b58、下剪叉机构,下剪叉机构包括左下x型杆a59等构件,并与上移动平台1结构相同。先由左下x型杆a59和左下x型杆b60等部件组成一级x型伸缩机构,再通过一级x型伸缩机构首位相接组成二级x型伸缩机构,并安装再左固定架c63等上面与固定板58b相连接,通过螺栓螺母将重力块71安装在左固定架d和右固定架d66上。
[0075]
如图21所示,水轮机整体结构的重量一直保持不变,且在工作过程中都浸没在水中,故水轮机在水中的浮力一直保持不变。通过电机26的正向旋转带动上齿轮27旋转,最终带动与上齿轮27相互啮合的上齿条25,上齿条25在固定底板a24的滑槽内滑动,带动与上齿条25固定连接在一起的上连杆28,通过上连杆28的移动带动两边的二级x型伸缩机构来实现上移动平台1的伸展和收缩。而上齿轮27安装在传动轴32上,通过上齿轮27的转动带动传动轴32和下齿轮同步转动,通过带动二级x型伸缩机构,使上移动平台1和下移动平台3同步伸展和收缩,改变水轮机在水中的深度,进而调节叶尖浸没水深。又因为上下伸展的距离相同,迎水面对称,在运动过程中,受力平衡,实现阻力矩自平衡。
[0076]
如图21所示,调节水轮机本体叶尖浸没水深的工作原理为:在当前水轮机工作环境不适宜时,改变水轮机叶尖浸没水深,通过电机26的旋转带动上齿轮27旋转,最终带动与上齿轮相互啮合的上齿条运动,因为上齿条安装在固定底板a的滑槽内,所以上齿条只能沿滑槽运动,并带动与上齿条固定连接在一起的上连杆运动。而上连杆两边通过连轴带动两边的二级x型伸缩机构的伸展和收缩,使上移动平台伸展和收缩。上齿轮安装在传动轴上,同样安装在传动轴上的下齿轮也由电机驱动下同步转动,并带动与下齿轮相互啮合的下齿条运动,下齿条则安装在固定底板b的滑槽内,与下连杆一同运动。下连杆的运动带动两边的二级x型机构伸展和收缩,最终带动下移动平台和上移动平台的同步伸展和收缩,水轮机将在重力和浮力作用下下沉和上浮,由此来改变水轮机所处深度,进而改变水轮机本体叶尖浸没水深,使水轮机达到一个合适的工作环境。叶尖浸没水深h1与初始叶尖浸没水深h0、水轮机下沉位移h2的关系为:h1=h0+h2,即h2=h
1-h0。
[0077]
如图22所示,通过调节水轮机转速调节水轮机叶尖速比,调节水轮机转速的工作原理为:发电机输出端经过整流装置、滤波电容后连接到调阻装置上,构成回路,发电机工作过程中,回路中将产生电流,调节调阻装置接入回路中的电阻值,当电阻值增大时,回路中电流减小,水轮机的电枢电流减小,电磁转矩减小,水轮机转速增加;当电阻值减小时,回路中电流增大,水轮机的电枢电流增大,电磁转矩增大,水轮机转速减小,所以,通过调节调
阻装置接入回路的电阻值可以调节水轮机转速。
[0078]
如图23所示,潮流对水轮机迎水面形成推力,其中,上移动平台受力为f1、中间主体受力为f2、下移动平台受力为f3,左立柱和右立柱通过滑轮对水轮机形成推力,用以抵抗f1、f2、f3,滑轮处受支反力f4、f5。由此得平衡公式:
[0079][0080]
则有,
[0081][0082]
其中,l1为下移动平台迎水面到中间主体几何中心的距离,δl为上、下移动平台到中间主体几何中心的距离的差值,l2为上滑轮、下滑轮到中间主体几何中心的距离。
[0083]
水轮机与左立柱、右立柱之间的摩擦力为f
摩
=(|f4|+|f5|)μ,其中μ为摩擦系数。则有,
[0084][0085]
在δl≠0情况下,
[0086]
当时,
[0087]
当时,此时,
[0088]
由于所以,f
摩2
>f
摩1
。
[0089]
在δl=0情况下,f
摩3
=(2f1+f2)μ。
[0090]
由此可见,当上移动平台和下移动平台运动距离的差值超过阈值时,摩擦力增大,对水轮机上、下运动的阻力增大,深度调节难度增大,当上移动平台和下移动平台运动距离始终相等时,摩擦力始终保持不变。本发明专利上移动平台和下移动平台运动距离始终相等,所以摩擦力不变,有利于水轮机深度调节。
[0091]
如图24所示,中间变量h3与水轮机下沉位移h2的关系为h2=4h3,中间变量h3与驱动齿轮旋转圈数n的关系为则驱动齿轮旋转圈数n与水轮机下沉位移h2的关系为由于h2=h
1-h0,所以,其
中,h0为初始叶尖浸没水深,a为二级x型机构两杆端点初始距离,b为单个杆件长度,z为驱动齿轮齿数,m为驱动齿轮模数,h1为此时达到叶尖浸没水深。
[0092]
如图25所示,发电机电气回路关系为其中,e为发电机感应电势,ra为调阻装置接入电阻,i为回路中电流,r
总
为调节电阻最大电阻,l
总
为调节电阻总长,l
目标
为调阻螺母位移距离。
[0093]
实施例2
[0094]
本实施例中一种水轮机转速调节方法,包括以下步骤:
[0095]
(1)由速度传感器检测潮流实际运动速度v
实际
;
[0096]
(2)根据叶轮能量利用率与叶尖速比之间的关系得到叶轮最高能量利用率时的最佳叶尖速比λ;
[0097]
(3)根据得到的最佳叶尖速比得到水轮机本体的目标转速n
目标
,由得其中,r为水轮机叶轮半径;
[0098]
(4)根据水轮机本体转速与接入水轮机本体的电阻之间的关系,控制转速调节装置调节调阻螺母,改变接入水轮机本体的电阻,从而改变水轮机本体的转速,使水轮机本体的转速达到目标转速;具体包括:
[0099]
(41)根据水轮机机械传输特性有jr为水轮机传动系统折合到水轮轴的惯量,主轴转动角速度tr为水轮机所获得的水动力矩,该数值由水轮机内部的扭矩传感器测得,tm为电磁转矩(由于感应电势公式则回路中电流根据电磁转矩公式tm=cmφi,得其中,ce为电势常数,φ为磁通,ra为调阻装置接入电阻,cm为转矩常数),阻尼力矩td=cnn
目标
,cn为阻尼系数,从而有则
[0100]
(42)计算调阻螺母目标位移l
目标
,由于则
[0101]
(43)闭环控制调阻装置调节螺母位移为l
目标
,如图26所示,把测得潮流速度v
实际
通过计算将控制量传输到电机驱动器,由电机驱动器控制电动机,通过电动机驱动丝杠转动控制调阻螺母位移,再通过位移传感器监测调阻螺母位移数据传输给调阻螺母位移控制器中,形成闭环控制,最终使得调阻螺母位移为l
目标
;
[0102]
(5)返回到步骤(1),实时检测潮流实际运动速度,根据检测的潮流实际运动速度实时对水轮机本体转速进行调节。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1